") 通過設(shè)計進行生物設(shè)計:看看軟機器人
通過設(shè)計進行生物設(shè)計:看看軟機器人

機器人技術(shù)通過進入我們的家庭并通過其執(zhí)行醫(yī)療程序和治療應(yīng)用程序正在重塑人們的生活。為了讓機器人技術(shù)進一步進入人類生活,設(shè)計師必須采用以人為本的方法,重新設(shè)計金屬和機械更少、更像人類的機器人設(shè)計。一些備受關(guān)注的領(lǐng)域包括合成皮膚以及靈活靈巧的手和四肢,使機器人能夠正確地抓住物體——無論是輕輕地還是緊緊地。
隨著機器人變得越來越便宜和易于使用,它們出現(xiàn)在各種各樣的應(yīng)用中,從醫(yī)學(xué)到農(nóng)業(yè)到科學(xué)探索和紡織裝配線——其中一些是非常精細的工作。通過為機器人提供更自然、更像人的形式和社會存在感來使機器人人性化是一項艱巨的挑戰(zhàn)。這種人性化需要綜合生物科學(xué)、材料科學(xué)、機械和電子學(xué)的交叉,以使機器人的行為和看起來更像普通人。
軟體機器人使用溫和、順應(yīng)的機制和使用流體和柔性材料構(gòu)建的執(zhí)行器,能夠進行廣泛的運動,使它們更適合外骨骼或可穿戴設(shè)備。許多軟機器人形式比傳統(tǒng)的、更剛性的機器人更輕,它們的設(shè)計元素結(jié)合了類似肌肉的驅(qū)動、柔軟的皮膚附件和電子可釋放的彈簧元件。工程師們還在研究電活性聚合物、電粘附抓取和電層壓板在軟體機器人中的作用——所有這些開發(fā)最終都可以幫助人類與機器人舒適地融合,獲得超人的力量和能力。
來自機器人的人造肌肉有可能從根本上改變許多類型的工業(yè)、醫(yī)療、消費、汽車和航空航天產(chǎn)品的動力和操作方式。由于質(zhì)量更輕、物理尺寸更小、可聞噪聲更低和成本更低,因此與基于電磁的技術(shù)相比,它們具有顯著優(yōu)勢。此外,它們提供更多控制,其固有的配置靈活性使機器人能夠更接近人類靈活性和機動性的極限。用聚合物制造機器人——特別是模量與人類皮膚相當(dāng)?shù)膹椥泽w——自動消除了與人和機器人交互有關(guān)的許多安全問題。
制造可以復(fù)制人手細膩觸感的機器是一項極其復(fù)雜的工作。軟機器人工程師已經(jīng)試驗了許多不同的形式,從柔軟的斑點到蟒蛇啟發(fā)的爪子到電粘附。科學(xué)家們在開發(fā)柔軟的抓手方面也取得了進展,這些抓手使用分層皮瓣和帶有硅酮皮膚涂層的預(yù)拉伸彈性體,其作用類似于人手上的拇指和食指。
富有表現(xiàn)力的手將使機器人自然而然地俘獲人們的心靈和思想,因為未來的相遇將更加人性化。模仿人類的手勢,如握手、豎起大拇指表示一切順利、手指交織等,將證明可以緩和人類對這些軟機器人發(fā)展的情緒。
使這一趨勢成為現(xiàn)實的一家公司是Molex。Molex 是一家領(lǐng)先的電子元件和解決方案供應(yīng)商,致力于為客戶帶來創(chuàng)新,從而推動這些變革。Molex 通過創(chuàng)建開創(chuàng)性的電子解決方案來解決復(fù)雜的客戶挑戰(zhàn)。Molex 的 Temp-Flex 電纜提供解決方案來協(xié)助這些創(chuàng)新。Temp-Flex 產(chǎn)品可承受極端條件和惡劣環(huán)境,其所有標準產(chǎn)品線均符合有害物質(zhì)限制 (RoHS) 合規(guī)標準。Temp-Flex 是一家受人尊敬的行業(yè)領(lǐng)導(dǎo)者,擁有創(chuàng)新的設(shè)計和優(yōu)質(zhì)的制造工藝,可提供全球客戶所需的創(chuàng)新解決方案和特種電線電纜解決方案。Temp-Flex 電纜對人類使用具有生物相容性,非常適合用于人類生物力學(xué)性能衍生的機器人應(yīng)用。
Temp-Flex Micro 微型帶狀電纜是具有可布線性的帶狀格式的醫(yī)療產(chǎn)品。Temp-Flex 的微型帶狀電纜具有生物相容性并具有出色的同心度。這些電纜包括 50AWG (0.0254mm) 和更大的電線,無針孔絕緣小于 0.0762mm。Temp-Flex MediSpec 微型同軸電纜是滿足同軸需求的相關(guān)產(chǎn)品,具有嚴格的公差、高介電耐壓和出色的同心度。這些電纜展示了柔性電介質(zhì)的堅固性。FEP 和 PFA 是聚四氟乙烯 (PTFE)(通用商品名:Teflon)的替代品,(C 2 F 4 ) n和外徑小至 0.24 毫米的 ePTFE 膠帶纏繞結(jié)構(gòu)。Temp-Flex 提供范圍廣泛的護套材料,包括但不限于 EFTE、PVDF、PVC、TPE、Pebax 和聚氨酯。
軟體機器人研究正在激發(fā)新材料和技術(shù)的設(shè)計,這些新材料和技術(shù)能夠感知特定線索,例如壓力、來自不同方向的力和振動。軟體機器人可以在活動推廣、休閑娛樂、研究、培訓(xùn)和教育、醫(yī)療保健、醫(yī)療服務(wù)、零售和酒店等領(lǐng)域為類人服務(wù)機器人提供市場機會。這項技術(shù)表明它將改善人類與機器人之間的體驗和關(guān)系。它將通過設(shè)計機器人來實現(xiàn)一個包含更充分實現(xiàn)的、類人的、綜合生物力學(xué)的性能水平。
審核編輯黃昊宇
-
機器人
+關(guān)注
關(guān)注
213文章
31079瀏覽量
222266
發(fā)布評論請先 登錄
探索RISC-V在機器人領(lǐng)域的潛力
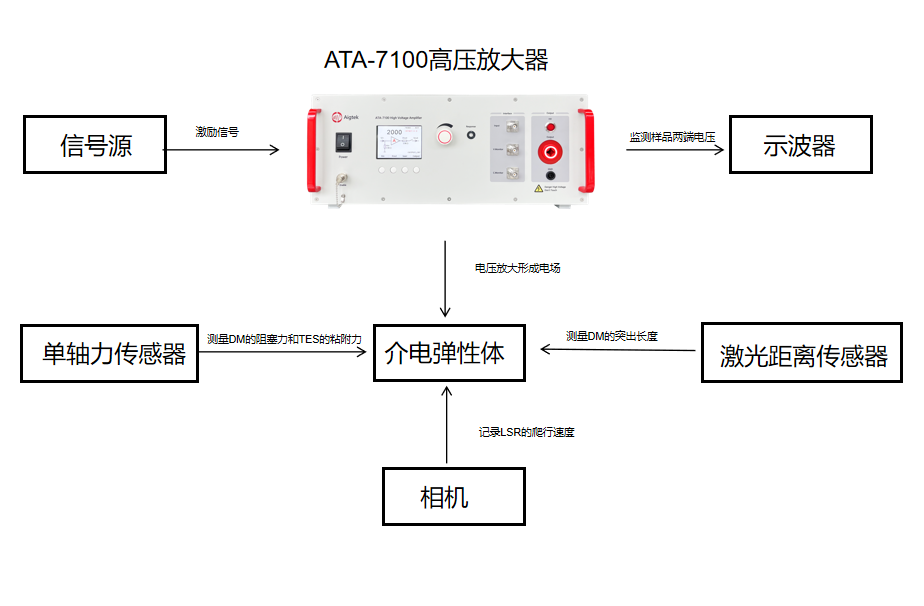
高壓放大器在介電彈性體制成的軟機器人研究中的應(yīng)用
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
小蘿卜機器人的故事
什么是機器人?追溯機器人技術(shù)的演變和未來

機器人競技幕后:磁傳感器芯片激活 “精準感知力”
介電彈性體軟機器人研究:高壓放大器的應(yīng)用實踐




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論