 機器人電纜不應該是事后的想法
機器人電纜不應該是事后的想法

機器人,無論是作為“類人機器人”伴侶還是作為鉸接式生產和裝配臂,如今都受到了廣泛關注,這是理所當然的。精確的電機控制、增強的視覺和圖像處理、增強的中央處理器 (CPU) 能力、人工智能 (AI) 驅動的決策以及先進的抓握技術,使得關于機器人的討論在投機記者的故事以及在各個行業日常運營的艱苦現實中。這種趨勢是有道理的,考慮到這些高效的機器人模型工作良好,努力工作,不抱怨,不需要休息,并完成人類難以完成的事情。
您已經看到了從自動裝配線到漢堡包翻轉裝置的圖片和視頻,這肯定令人印象深刻。這些機器人的大多數照片都顯示出它們圓滑、流線型和干凈,關于它們的設計和構造的技術討論集中在算法、性能和功能上。
然而,對于工程師和設計師來說,大容量機器人設計中同樣令人印象深刻的是從使用液壓動力(及其所有令人頭疼的問題)到電動機原動機的重大轉變,尤其是在過去幾年中。電動驅動器更清潔、更易于控制,并且如果軟管破裂也不會造成漏油的風險。它們也更易于測試和維護,即使液壓裝置提供更高的功率密度/體積。(公平地說,液壓系統也變得越來越智能,有各種各樣的電子設備來控制和監督它們的動作——盡管原動機仍然是液壓缸和活塞。)
但是電動機器人實施的一個方面很少被提及:這個方面是從控制單元和電源到手臂、關節和把手的電機和傳感器的基本電纜。雖然這些電纜通常塞在類人機器人的框架內,因此是看不見的,但對于使用更廣泛的裝配/生產單元而言,情況通常并非如此。讓我們面對現實:外部電纜束并不是令人興奮的話題,從視覺上看,它們體積龐大,對大多數人來說有點沒有吸引力。(你有沒有注意到那些光鮮亮麗的“家居裝飾”照片中并沒有顯示交流電 (AC) 電源線,而且只顯示了臺燈?)
當然,在現實世界中,機器人的電源和控制電纜是必不可少的,并且通常連接在其手臂的外側,因為手臂內部沒有空間容納這些相當笨重的電纜。然而,這種非常實際的做法會導致另一個問題:如何“修飾”電纜,使它們保持在應有的位置,允許必要的運動范圍,并且不會纏結。
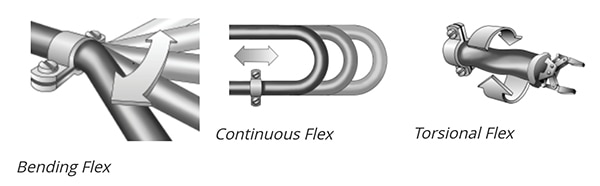
顯而易見的解決方案很簡單:只需使用電纜扎帶、特殊膠帶或類似的東西將它們連接到關節臂上。應該這樣做,但通常做得不好。事實上,在具有許多自由度的先進機械臂中,電纜可能會扭曲、彎曲、拉緊或過度濫用,從而導致性能間歇性下降和徹底失效。
直到我在Tech Briefs上看到一篇題為“機器人電纜管理的少即是多的方法”的文章之前,我并沒有過多地考慮這個主題,該文章討論了“顯而易見的”解決方案的問題和弱點。盡管它是由電纜保護線槽和外殼的供應商撰寫的并且(因此)可能有偏見,但文章中的許多觀點都是正確的。該文章甚至提供了指導原則,指導您應在何處將整個布線路徑劃分為可單獨保護的部分。
長話短說:如果您正在對高度鉸接的多軸機械臂進行任何工作,請務必在項目的“前沿”花費足夠的時間和精力,以妥善解決布線電纜這一平凡而乏味的話題。它們與實現和保持可靠性能水平的任何其他元素一樣重要。
您是否曾嘗試找出因電纜標準損壞而導致的間歇性問題?它令人沮喪、混亂和惱人——并且會耗盡設計團隊、調試專家和現場工程師的精力。然而,這也是一個利用他人專業知識的機會。例如,機器人電纜必須一遍又一遍地彎曲,所以為什么不看看電梯人員為他們的井道電纜做了什么。盡管他們沒有與多自由度相關的機械臂問題,但他們知道如何制造一種靈活的電纜,承載自身重量和強大的動力,并具有堅固的外殼。
審核編輯黃昊宇
-
機器人
+關注
關注
213文章
31337瀏覽量
223431 -
電纜
+關注
關注
18文章
3111瀏覽量
58085
發布評論請先 登錄
CW32L012小型機器人控制評估板活動 四足機器人+智能小車 開箱評測
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
小蘿卜機器人的故事
自制巡線解迷宮機器人(上)
機器人 VFD 電纜選型時的運動性能考量
什么是機器人?追溯機器人技術的演變和未來

匯川技術工業級協作機器人U8的應用場景
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
工業機器人的特點
工業機器人與協作機器人概念不同




 工商網監
工商網監
評論