") C4.8.2系統(tǒng)之機(jī)器人線性外部軸設(shè)置軟件
C4.8.2系統(tǒng)之機(jī)器人線性外部軸設(shè)置軟件

使用該軟件,可以安裝或卸載線性單元(直線外部軸)。
調(diào)試-線性單位,兩個(gè)軟件.
注意:如果安裝了SynchroMove,則無(wú)法使用此附加軟件!(不能使用虛擬外部軸軟件!)

§選擇供應(yīng)商
§注意正確的電源電壓!
§400V或440V的不同封裝
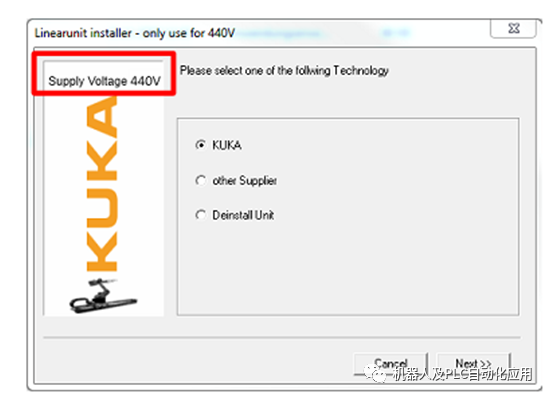
注意:電源電壓不正確的軟件可能會(huì)損壞組件(使用時(shí)選擇電壓要和機(jī)器人復(fù)制MADA數(shù)據(jù)時(shí)相一致)
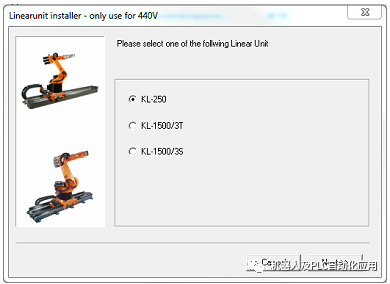
選擇線性單位
KL-250專用于KR-16機(jī)器人
選擇機(jī)器人類型
§單擊“下一步”安裝完成
§負(fù)載之間的限制是KR300
審核編輯 :李倩
聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31079瀏覽量
222291 -
軟件
+關(guān)注
關(guān)注
69文章
5332瀏覽量
91590 -
電源電壓
+關(guān)注
關(guān)注
3文章
1260瀏覽量
26397
原文標(biāo)題:C4.8.2系統(tǒng)之機(jī)器人線性外部軸設(shè)置軟件
文章出處:【微信號(hào):gh_a8b121171b08,微信公眾號(hào):機(jī)器人及PLC自動(dòng)化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
機(jī)器人內(nèi)部零配件的生產(chǎn)加工廠從哪找?
的可靠性 :機(jī)器人內(nèi)部的傳動(dòng)系統(tǒng)需要高精度的零件來(lái)保證運(yùn)行的平穩(wěn)性和低噪音。力存科技生產(chǎn)的軸類零件和齒輪組件,通過(guò)精密加工,確保了零件的形位公差控制在極小范圍內(nèi),使得機(jī)器人在運(yùn)行時(shí)能夠
發(fā)表于 12-09 18:22
探索RISC-V在機(jī)器人領(lǐng)域的潛力
應(yīng)用,特別是機(jī)器人操作系統(tǒng)領(lǐng)域的可行性。MUSE Pi Pro以其強(qiáng)大的K1 AI CPU和官方對(duì)主流開(kāi)源軟件棧的積極適配,成為了一個(gè)非常有吸引力的選擇。
二、 硬件初窺:性能小鋼炮
MUSE Pi Pro
發(fā)表于 12-03 14:40
高精度機(jī)器人控制的核心——基于 MYD-LT536 開(kāi)發(fā)板的精密運(yùn)動(dòng)控制方案
集成方案;
開(kāi)發(fā)者可直接對(duì)接上層 ROS 框架,實(shí)現(xiàn)多軸機(jī)器人同步控制與智能路徑規(guī)劃。
三、典型應(yīng)用:高精度裝配機(jī)器人控制系統(tǒng)
在某高端電子裝配項(xiàng)目中,工程團(tuán)隊(duì)基于 MYD-LT53
發(fā)表于 11-14 15:48
RK3576機(jī)器人核心:三屏異顯+八路攝像頭,重塑機(jī)器人交互與感知
。· 利用開(kāi)發(fā)板上的MIPI CSI1和CSI2接口,完整接入8路攝像頭,實(shí)現(xiàn)了所有通道的視頻預(yù)覽與采集,為機(jī)器人構(gòu)建了全方位的視覺(jué)感知系統(tǒng)。卓越性能表現(xiàn):· CPU占用率:34%· DDR占用率:50
發(fā)表于 10-29 16:41
自制巡線解迷宮機(jī)器人(上)
簡(jiǎn)單點(diǎn)的項(xiàng)目來(lái)練練手,想來(lái)想去覺(jué)得自己下半年計(jì)劃要做的巡線解迷宮機(jī)器人最為合適,不過(guò)由于時(shí)間有限的緣故,我決定先把這個(gè)機(jī)器人的原理驗(yàn)證機(jī)先搭建出來(lái)(標(biāo)題中上篇的由來(lái)),等硬件和軟件都經(jīng)過(guò)驗(yàn)證沒(méi)有問(wèn)題后
發(fā)表于 10-20 10:39
機(jī)器人競(jìng)技幕后:磁傳感器芯片激活 “精準(zhǔn)感知力”
支撐機(jī)器人競(jìng)技能力的核心力量,深刻改變著競(jìng)技機(jī)器人的能力邊界。
磁傳感器芯片為機(jī)器人運(yùn)動(dòng)提供 “精準(zhǔn)導(dǎo)航”。在動(dòng)態(tài)平衡系統(tǒng)中,像昆泰芯 KTH71 系列磁傳感器芯片,通過(guò)檢測(cè)地磁場(chǎng)與
發(fā)表于 08-26 10:02
工業(yè)機(jī)器人的特點(diǎn)
0.3%的年化生產(chǎn)力提升。因此,發(fā)展工業(yè)機(jī)器人推動(dòng)國(guó)內(nèi)自動(dòng)化水平,提高產(chǎn)出是目前的不二之選。
** 適用范圍廣**
機(jī)器人相對(duì)于工人的優(yōu)勢(shì)還體現(xiàn)在應(yīng)用范圍廣。機(jī)器人可以運(yùn)用在危險(xiǎn)、惡劣
發(fā)表于 07-26 11:22
輪式移動(dòng)機(jī)器人電機(jī)驅(qū)動(dòng)系統(tǒng)的研究與開(kāi)發(fā)
系統(tǒng),開(kāi)發(fā)了一套二輪差速驅(qū)動(dòng)轉(zhuǎn)向移動(dòng)機(jī)器人電機(jī)驅(qū)動(dòng)系統(tǒng),完成了系統(tǒng)各部件的整體裝配和調(diào)試。試驗(yàn)結(jié)果表明,該設(shè)計(jì)方案可行、系統(tǒng)運(yùn)行穩(wěn)定可靠、成
發(fā)表于 06-11 14:30
大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開(kāi)源六軸機(jī)械臂產(chǎn)品
大象機(jī)器人成立于2016年,專注協(xié)作機(jī)器人研發(fā)與應(yīng)用,產(chǎn)品線涵蓋輕量級(jí)協(xié)作機(jī)器人、人形機(jī)器人、仿生機(jī)器人等多種形態(tài)。拳頭產(chǎn)品myCobot系

RT-Thread睿賽德亮相深圳機(jī)器人產(chǎn)業(yè)大會(huì),聚焦機(jī)器人軟件系統(tǒng)技術(shù)前沿 | 新聞速遞
近日,由開(kāi)源中國(guó)社區(qū)主辦的"未來(lái)智造:機(jī)器人軟件系統(tǒng)技術(shù)前沿"源創(chuàng)會(huì)在深圳會(huì)展中心成功舉辦。會(huì)議聚焦機(jī)器人軟件

盤(pán)點(diǎn)#機(jī)器人開(kāi)發(fā)平臺(tái)
地瓜機(jī)器人RDK X5開(kāi)發(fā)套件地瓜機(jī)器人RDK X5開(kāi)發(fā)套件產(chǎn)品介紹 旭日5芯片10TOPs算力-電子發(fā)燒友網(wǎng)機(jī)器人開(kāi)發(fā)套件 Kria KR260機(jī)器人開(kāi)發(fā)套件 Kria KR260-
發(fā)表于 05-13 15:02
詳細(xì)介紹機(jī)場(chǎng)智能指路機(jī)器人的工作原理
機(jī)場(chǎng)智能指路機(jī)器人主要依靠感知系統(tǒng)、定位系統(tǒng)、導(dǎo)航系統(tǒng)、智能交互系統(tǒng)和運(yùn)動(dòng)系統(tǒng)協(xié)同工作,來(lái)實(shí)現(xiàn)為
發(fā)表于 05-10 18:26
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】機(jī)器人入門(mén)的引路書(shū)
ROS的全稱:Robot Operating System 機(jī)器人操作系統(tǒng)
ROS的 目的 :ROS支持通用庫(kù),是通信總線,協(xié)調(diào)多個(gè)傳感器
為了解決機(jī)器人里各廠商模塊不通用的問(wèn)題,讓機(jī)器人
發(fā)表于 04-30 01:05
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】+內(nèi)容初識(shí)
、軟件開(kāi)發(fā)、系統(tǒng)集成等環(huán)節(jié),讓讀者能夠全面了解一個(gè)完整的機(jī)器人應(yīng)用開(kāi)發(fā)過(guò)程。
實(shí)踐項(xiàng)目:除了案例分析,書(shū)中還設(shè)計(jì)了一些實(shí)踐項(xiàng)目,供讀者進(jìn)行動(dòng)手實(shí)踐。這些實(shí)踐項(xiàng)目涵蓋了從簡(jiǎn)單的傳感器數(shù)據(jù)處理到復(fù)雜的多
發(fā)表于 04-27 11:24
大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開(kāi)源六軸機(jī)械臂產(chǎn)品
大象機(jī)器人成立于2016年,專注協(xié)作機(jī)器人研發(fā)與應(yīng)用,產(chǎn)品線涵蓋輕量級(jí)協(xié)作機(jī)器人、人形機(jī)器人、仿生機(jī)器人等多種形態(tài)。拳頭產(chǎn)品myCobot系
發(fā)表于 04-25 17:59



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論