 對雷達實施距離拖引干擾的過程是怎樣的
對雷達實施距離拖引干擾的過程是怎樣的

對雷達實施距離拖引干擾的過程如下:
1. 干擾脈沖捕獲距離波門
載機收到雷達脈沖后,以最小的延遲通過誘餌轉發一個干擾脈沖,干擾脈沖與目標回波脈沖幾乎重合,但干擾脈沖信號幅度J大于目標回波脈沖信號幅度S,雷達的AGC電路將按干擾信號幅度調整電路的增益,保證雷達接收機的輸出信號處在一定的動態范圍以內。
這樣保持一段時間,稱為停拖,其目的是使干擾信號與目標信號同時處在距離波門上,使得干擾信號能夠截獲雷達的距離波門。停拖時間要求大于雷達接收機自動增益控制電路的慣性時間。
2. 距離波門拖引
當雷達距離波門可靠地跟蹤到干擾脈沖后,誘餌干擾機在轉發干擾脈沖時,逐步增加轉發脈沖相對于回波脈沖的時間延遲,使得距離波門隨干擾脈沖移動時,目標回波脈沖逐步離開到波門以外,直到距離波門的中心位置偏離目標位置若干個波門的寬度。距離拖引時要求拖引速度(誘餌脈沖的距離變化率)小于雷達跟蹤系統的最大速度指標。
3. 干擾機關機
用干擾脈沖將距離波門從目標脈沖處拖開足夠大的距離以后,關閉干擾機,這時制導雷達距離波門內既無目標回波也無干擾脈沖,即目標丟失,此時雷達系統的距離波門重新轉入搜索狀態。
如果雷達重新搜索到目標,則干擾機可以重復上述過程,繼續實施拖引干擾。對于雷達而言,彈目之間的交會時間很短,尤其是在近距離情況下,目標丟失后,來不及重新搜索和捕獲目標,會造成導彈的脫靶。
RGPO模型算法
下面對RGPO的模型算法進行分析。距離波門拖引(勻速拖引)干擾中假目標的距離函數可以表示為: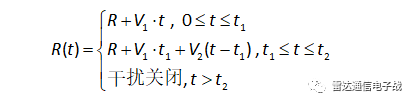
在距離波門拖引過程中,為了保證距離跟蹤的持續性,起始拖引假目標與目標回波時延要求很小,雷達處理后的跟蹤航跡才能夠逐漸地偏離真實目標艦船,否則雷達將無法丟失對真實目標的跟蹤。 對采用線性調頻體制的雷達移頻拖引干擾實現過程進行分析。LFM信號是一種典型的脈沖壓縮信號,它通過非線性相位調制來獲得大時寬帶寬積。采用這種信號的雷達能夠同時獲得遠的作用距離和高的分辨率。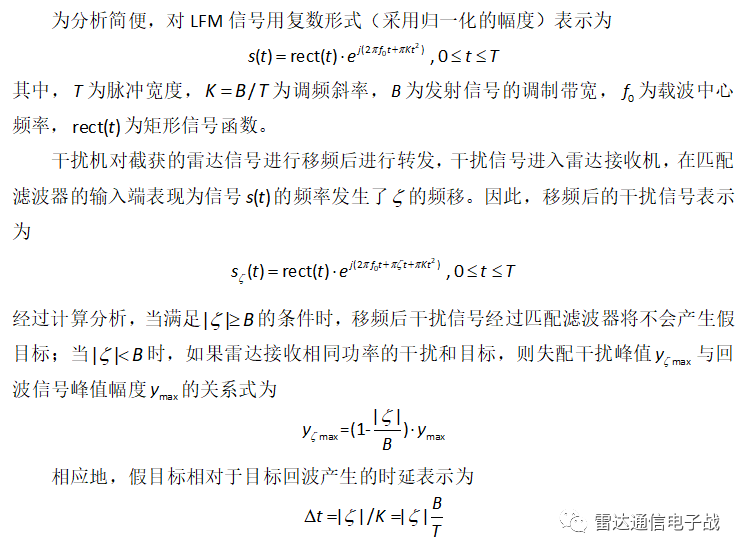
根據LFM信號時延與頻移之間的關系式,有源干擾時通過對截獲的雷達發射信號調制一個附加的頻率后轉發給雷達,就可以使雷達產生一個假目標,假目標或領先于匹配目標,或者滯后于匹配目標,取決于給定移頻量的正值或是負值。
根據雷達脈沖到達時間(TOA)對移頻量進行調整,可以使得假目標不斷地偏移目標回波,從而形成距離波門干擾。
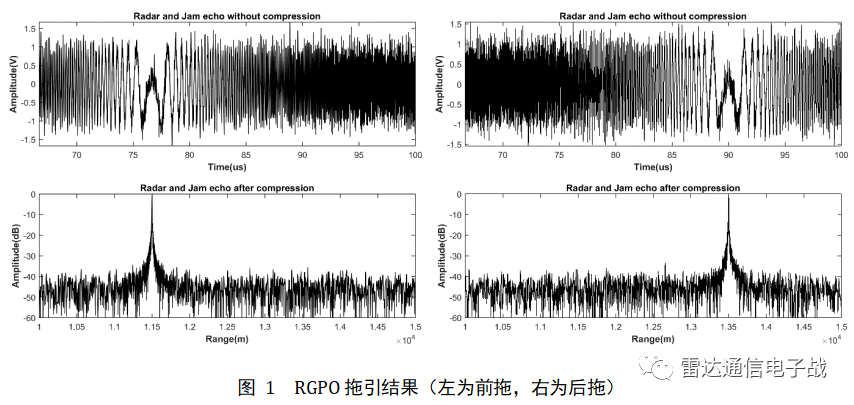
當移頻量為負值時,將產生距離波門后拖干擾;當移頻量為正值時,將產生距離波門前拖干擾。
對于自衛式干擾,R,V取值均為0,為拖引開始時間,在實際建模過程中可將其設置為0,則勻速拖引時拖引期假目標拖引距離表示為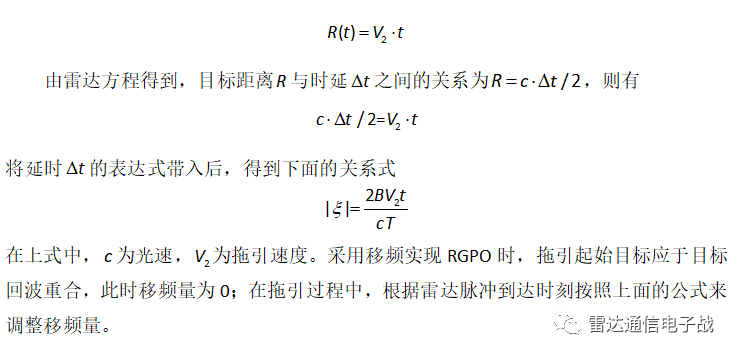
審核編輯:劉清
-
雷達接收機
+關注
關注
0文章
23瀏覽量
9976 -
AGC
+關注
關注
0文章
170瀏覽量
53564 -
脈沖信號
+關注
關注
6文章
408瀏覽量
38514
原文標題:對雷達實施距離拖引干擾的過程
文章出處:【微信號:雷達通信電子戰,微信公眾號:雷達通信電子戰】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
遠距離無線芯動力,穿透干擾穩連接——深入解讀LoRa擴頻技術
毫米波雷達如何用距離與角度分辨率感知世界

單模光纖最短傳輸距離是多少米
E54系列人體運動感知與距離檢測雷達模組上位機配置使用說明

怎樣減少電磁干擾對電能質量在線監測裝置的影響?

智能衛浴雷達模塊感應方案WT4101壽命長不怕干擾
網線傳輸距離和哪些因素有關

明治案例 | 10米長距離實時測量,傳輸“零干擾”

?定華雷達儀表學堂:雷達物位計的安裝和基本調試步驟是怎樣的
全固態激光雷達為什么遲遲未來?其技術難點是什么?
自動駕駛毫米波雷達之間會相互干擾嗎?

自動駕駛激光雷達之間會相互干擾嗎?
雷達物位計干擾因素詳解
控制器距離電機近的時候 OT就有輸出,避免電磁干擾的辦法有哪些?




 工商網監
工商網監
評論