") 玩轉(zhuǎn)OpenHarmony PID:教你打造兩輪平衡車
玩轉(zhuǎn)OpenHarmony PID:教你打造兩輪平衡車

點(diǎn)擊藍(lán)字 ╳ 關(guān)注我們

王維平
OpenHarmony知識(shí)體系工作組
簡介




硬件配置資源
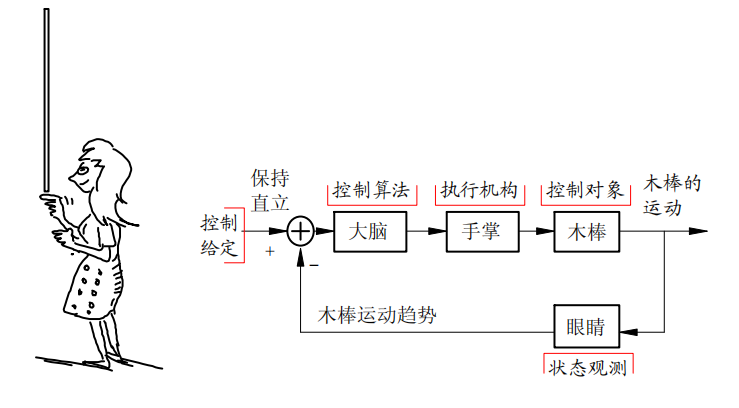
原理概括

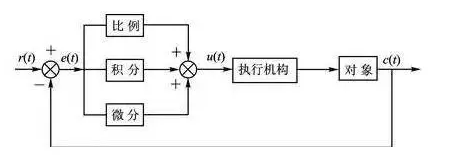
PID算法介紹

兩步搭建樣例工程


關(guān)鍵算法講解


float g_middleAngle = 1.0;//平衡角度
float g_kpBalance = -85800.0;
float g_kdBalance = -400;
static int ControlBalance(float angle, short gyro)
{
int outpwm = 0;
float angleBias = 0.0;
float gyroBias = 0.0;
float tempAngle = 0.0;
float tempGyro = 0.0;
tempAngle = 0 - angle;//極性控制
tempGyro = 0 - gyro;
angleBias = g_middleAngle - tempAngle;
gyroBias = 0 - tempGyro;
outpwm = (g_kpBalance / 100 * angleBias + g_kdBalance
* gyroBias / 100);
return outpwm;
}float g_kpSpeed = 95800.0;
float g_kiSpeed = 200;
static int ControlSpeed(long int left, long int right)
{
int outpwm = 0;
int speedBias = 0;
int speedBiasLowpass = 0;
static int speed_i = 0;
float a = 0.68;
static int speedBiasLast = 0;
speedBias = 0 - left - right;
speedBiasLowpass = (1 - a) * speedBias
+ a * speedBiasLast;
speedBiasLast = speedBiasLowpass;
speed_i += speedBiasLowpass;
speed_i = limit_data(speed_i, SPEED_H, SPEED_L);
outpwm = (g_kpSpeed * speedBiasLowpass / 100 +
gkiSpeed * speed_i / 100);
return outpwm;
}static int ControlTurn(short gyro)
{
int outpwm;
outpwm = g_kpTurn * gyro;
return outpwm;
}總結(jié)
相關(guān)鏈接
https://gitee.com/openharmony/docs/blob/master/zh-cn/release-notes/OpenHarmony-v3.2-beta1.md
https://gitee.com/openharmony-sig/vendor_oh_fun
https://gitee.com/bearpi/bearpi-hm_nano/tree/master/applications/BearPi/BearPi-HM_Nano/docs/quick-start
https://gitee.com/openharmony-sig/knowledge/blob/master/docs/co-construct_demos/README_zh.md
https://growing.openharmony.cn/mainPlay/learnPathMaps?id=19
https://gitee.com/openharmony-sig/knowledge_demo_smart_home
原文標(biāo)題:玩轉(zhuǎn)OpenHarmony PID:教你打造兩輪平衡車
文章出處:【微信公眾號(hào):OpenAtom OpenHarmony】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
-
鴻蒙
+關(guān)注
關(guān)注
60文章
2963瀏覽量
45907 -
OpenHarmony
+關(guān)注
關(guān)注
33文章
3952瀏覽量
21105
原文標(biāo)題:玩轉(zhuǎn)OpenHarmony PID:教你打造兩輪平衡車
文章出處:【微信號(hào):gh_e4f28cfa3159,微信公眾號(hào):OpenAtom OpenHarmony】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評(píng)論請先 登錄
百度地圖技術(shù)引擎重塑兩輪車導(dǎo)航新體驗(yàn)
四維圖新發(fā)布兩輪車智能化解決方案
ASM1042A3S車規(guī)級(jí)CANFD芯片在兩輪車和平衡車控制器方案中的技術(shù)應(yīng)用
四維圖新參與編制兩輪車智能化技術(shù)發(fā)展路線圖
Arduino Uno l兩輪自平衡機(jī)器人 電機(jī)驅(qū)動(dòng)無輸出求解
賦能兩輪車新國標(biāo) | 匠芯創(chuàng)D13x系列芯片為手機(jī)無線投屏與導(dǎo)航提供核心支持

電動(dòng)兩輪車儀表盤2.0時(shí)代來臨,開啟智慧出行新潮流
晶華微新歐標(biāo)兩輪車BMS解決方案

兩輪自平衡電動(dòng)車及其電機(jī)控制器設(shè)計(jì)
杰發(fā)科技亮相2025年兩輪車智能化技術(shù)發(fā)展大會(huì)
武漢芯源半導(dǎo)體CW32L010在兩輪車儀表的應(yīng)用介紹

武漢芯源半導(dǎo)體CW32L010在兩輪車儀表的應(yīng)用介紹
杰發(fā)科技持續(xù)賦能兩輪車智能化升級(jí)




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論