") 機械手的直角坐標(biāo)|多關(guān)節(jié)|圓柱坐標(biāo)|極(球)坐標(biāo)式運行方式簡述
機械手的直角坐標(biāo)|多關(guān)節(jié)|圓柱坐標(biāo)|極(球)坐標(biāo)式運行方式簡述

機械手的手臂運動形式有所不同,一般情況下機械手可以分為:直角坐標(biāo)式、多關(guān)節(jié)式、圓柱坐標(biāo)式、極(球)坐標(biāo)式四種形式。
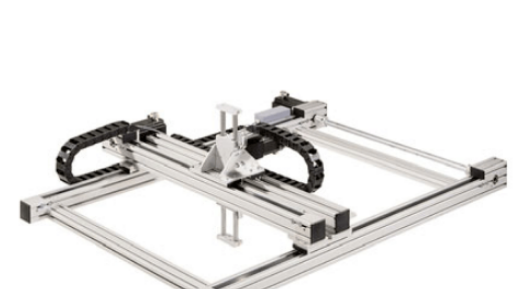
1.直角坐標(biāo)式就是機械手在直角坐標(biāo)系的三個坐標(biāo)軸方向作直線移動,即機械手的前后移動、上下升降、左右移動。直角坐標(biāo)機器人可達到很高的位置精度(μm級)。針對不同的應(yīng)用場合,對直角坐標(biāo)機器人有不同的設(shè)計要求,比如根據(jù)對精度、速度的要求選擇不同的傳動方式,根據(jù)特定的工藝要求為末端工作頭選擇不同的夾持設(shè)備(夾具、爪手、安裝架等),以及對于示教編程,坐標(biāo)定位、視覺識別等工作模式的設(shè)計選擇等,從而使之能滿足于不同領(lǐng)域、不同工況的應(yīng)用要求。
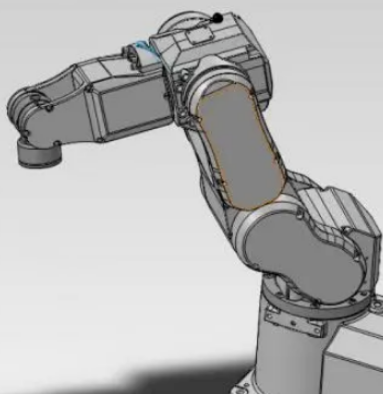
2.多關(guān)節(jié)式一般就是手臂會分為大臂和小臂兩段,大小臂之間由肘關(guān)節(jié)連接,而大臂與立柱之間又連接成肩關(guān)節(jié),再加上手腕與小臂之間的腕關(guān)節(jié)。但編程和操控必須由供應(yīng)商通過專業(yè)培訓(xùn)才能完成,而且特殊軟件需要收費。維護和維修完全受制于人,由于品牌互相不兼容,硬件故障必須由供應(yīng)商或廠家直接提供,非市場通用產(chǎn)品,費用高昂。
3.圓柱坐標(biāo)式這種就是機械手作前后伸縮、上下升降和在水平面內(nèi)擺的動作。這種機器人構(gòu)造比較簡單,精度還可以,常用于搬運作業(yè)。其工作空間是一個圓柱狀的空間。

4.極(球)坐標(biāo)式就是機械手作前后伸縮、上下俯仰和左右擺動的動作。這種機器人結(jié)構(gòu)簡單、成本較低,但精度不很高。主要應(yīng)用于搬運作業(yè)。其工作空間是一個類球形的空間。

CRT專業(yè)提供工業(yè)自動化運動控制技術(shù)及解決方案!
---(激光)焊接、拋光、切割、直坐標(biāo)機器人(桁架機械手)、等特種數(shù)控設(shè)備運動控制系統(tǒng)。
審核編輯黃昊宇
-
機械手
+關(guān)注
關(guān)注
7文章
358瀏覽量
31463
發(fā)布評論請先 登錄
SMT貼片坐標(biāo)總對不準(zhǔn)?4個快速校正技巧讓生產(chǎn)效率翻倍
PCB設(shè)計坐標(biāo)超出范圍的解決方案
三坐標(biāo)測量儀:從機械精密到智能協(xié)同的技術(shù)
三坐標(biāo)誤差補償技術(shù):陶瓷橫梁如何讓三坐標(biāo)少修正,更精準(zhǔn)?
三坐標(biāo)測量技術(shù)解析:從基礎(chǔ)原理到斜孔測量難點突破
三坐標(biāo)測量技術(shù)解析:從基礎(chǔ)原理到斜孔測量難點突破
凡億Allegro Skill工藝輔助之導(dǎo)出公制的坐標(biāo)

三坐標(biāo)和激光跟蹤儀的不同之處

三坐標(biāo)測量機精度保障,盡在蔡司三坐標(biāo)代測服務(wù)套餐

EtherCAT科普系列(7): EtherCAT技術(shù)在工業(yè)機器人控制系統(tǒng)領(lǐng)域的應(yīng)用

差示掃描量熱儀曲線的橫坐標(biāo)和縱坐標(biāo)各代表什么含義?

CMM三坐標(biāo)測量機能測量的數(shù)據(jù)

如何校準(zhǔn)三坐標(biāo)測量機精度
汽車制造用三坐標(biāo)測量機能解決哪些問題

三坐標(biāo)測量機的機器坐標(biāo)系和原點介紹




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論