") 如何克服嵌入式電機(jī)控制系統(tǒng)中的功耗-散熱挑戰(zhàn)
如何克服嵌入式電機(jī)控制系統(tǒng)中的功耗-散熱挑戰(zhàn)

功耗和散熱是嵌入式電機(jī)控制系統(tǒng)開(kāi)發(fā)人員面臨的持續(xù)挑戰(zhàn),因?yàn)殡S著執(zhí)行器在汽車中的部署越來(lái)越多、減少發(fā)動(dòng)機(jī)二氧化碳排放的驅(qū)動(dòng)力以及車輛重量的增加,集成度和性能密度不斷提高。
本文以步進(jìn)電機(jī)執(zhí)行器IC為例,對(duì)電機(jī)控制軟件和硬件環(huán)境提出了許多改進(jìn),旨在應(yīng)對(duì)這些挑戰(zhàn)。
在車輛中,電機(jī)和執(zhí)行器的應(yīng)用范圍很廣,從前格柵百葉窗和自適應(yīng)大燈到車門后視鏡調(diào)節(jié)器。電機(jī)控制IC顧名思義,控制電動(dòng)機(jī)的性能。這些器件正在不斷發(fā)展,以集成所有必要的功能,例如穩(wěn)壓器、振蕩器、看門狗、閃存、EEPROM、ADC、相電流控制和電機(jī)驅(qū)動(dòng)器。這種高集成度可在單個(gè)芯片內(nèi)實(shí)現(xiàn)緊湊而智能的執(zhí)行器設(shè)計(jì)。然而,缺點(diǎn)是集成度和性能密度的所有這些增加都會(huì)產(chǎn)生熱量。在空間非常寶貴的嵌入式電機(jī)控制系統(tǒng)中,工程師在功耗和熱管理方面正在達(dá)到極限。但這一挑戰(zhàn)并非不可戰(zhàn)勝;具體措施可以幫助解決電源散熱問(wèn)題。
建立熱預(yù)算
為了確定熱預(yù)算,我們研究了基于TDK-Micronas HVC 4xyzF SDB-I v4.1評(píng)估板的步進(jìn)電機(jī)執(zhí)行器,該評(píng)估板使用高度集成的電機(jī)控制IC(圖1)。該板在結(jié)構(gòu)和尺寸方面與現(xiàn)實(shí)生活中的應(yīng)用相似。
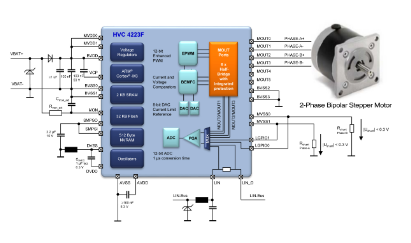
圖1:步進(jìn)電機(jī)執(zhí)行器框圖
操作執(zhí)行器的基本要求是:
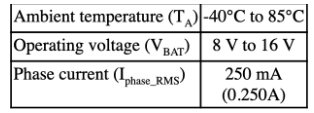
最大可能環(huán)境溫度 (TA) 由 IC 中的預(yù)期功耗 (PV_IC)、結(jié)和環(huán)境之間的熱阻 (RthJA) 以及允許的最高結(jié)溫 (TJ) 計(jì)算得出。在這里,應(yīng)考慮IC在電路板上的環(huán)境溫度,即沒(méi)有任何外殼,盡管可能存在一個(gè)。作為最壞的情況,將應(yīng)用最大值:
最大 T A =最大 TJ-PV_IC最大值xRth JA最大值
IC中轉(zhuǎn)換的總功耗由電機(jī)驅(qū)動(dòng)器(PMotorDriver)的功耗以及IC的CPU和外圍模塊(PDDP)的功耗組成。
PV_IC最大值=P電機(jī)驅(qū)動(dòng)器最大值+P 最大 DDP
電機(jī)驅(qū)動(dòng)器損耗由相電流 (IPhase_RMS) 和集成半橋的輸出電阻計(jì)算得出。對(duì)于兩個(gè)電機(jī)相位中的每一個(gè),都要考慮高端(RDS(ON)hs)和低邊晶體管(RDS(ON)ls)的電阻。一個(gè)PWM調(diào)制晶體管的開(kāi)關(guān)損耗是近似值。
psw=1/2 x U x Ix(tr+t f)xfPWM
20 kHz PWM頻率下的開(kāi)關(guān)損耗、開(kāi)關(guān)速度的標(biāo)準(zhǔn)設(shè)置和三個(gè)PWM調(diào)制晶體管由13%的附加功率損耗加法器表示。為簡(jiǎn)單起見(jiàn),我們沒(méi)有單獨(dú)考慮隨心所欲的損失。作為最壞情況的考慮,電機(jī)連續(xù)運(yùn)行,即有效相電流連續(xù)流動(dòng)。因此,電機(jī)驅(qū)動(dòng)器損耗的計(jì)算公式為:
P電機(jī)驅(qū)動(dòng)器最大值= 2 x(2 x(IPhase_rmsRDSONhs max.+RDSONls max.))x1.13
CPU和外設(shè)的損耗由IC的電流消耗(IDDP)和給定的工作電壓(VBAT)決定。為簡(jiǎn)化起見(jiàn),忽略可能存在的任何極性保護(hù)處的壓降,這表示額外的安全裕度。
借助以下數(shù)據(jù)表最大參數(shù),計(jì)算最大功耗:
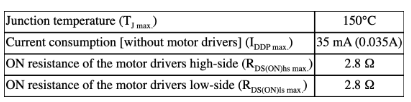
P最大 DDP=IDDP最大值x 最大 V 蝙蝠
P最大 DDP=0.035Ax16V=0.56W
這使我們能夠計(jì)算最大電機(jī)損耗:
P電機(jī)驅(qū)動(dòng)器最大值= 2 x(2 x(IPhase_rmsRDSONhs max.+RDSONls max.))x1.13
P電機(jī)驅(qū)動(dòng)器最大值= 2 x(0.25 2 A 2 x(2.8 Ω + 2.8 Ω))x 1.13 =0.791瓦
反過(guò)來(lái),我們可以計(jì)算IC中轉(zhuǎn)換的總功耗:
PV_IC最大值=P電機(jī)驅(qū)動(dòng)器最大值+P 最大 DDP
PV_IC最大值=0.791 W+0.56W=1.351W
執(zhí)行器的簡(jiǎn)化熱模型(圖2)表明,這僅限于初級(jí)熱阻,這應(yīng)該足以考慮穩(wěn)態(tài)。

圖 2:TDK HVC 4xyzF SDB-I v4.1 評(píng)估板的簡(jiǎn)化熱模型
起點(diǎn)是類似于圓形評(píng)估板的電路板,由 FR4 材料制成;它厚1.6毫米,直徑40毫米。它有兩個(gè)信號(hào)層,一個(gè) 35 μm 銅層、一個(gè) 3 x 3 熱通孔陣列和一個(gè)位于 ePad 下方底部的銅表面,其面積約為 0.75 cm2。
該電路板的最大RthJA約為32 K/W。因此, 我們可以計(jì)算電路板的最大可能環(huán)境溫度。
最大 T A =最大 TJ-PV_IC最大值xRth JA最大值
最大 T A =150°C-(1.351瓦× 32K/瓦) =106.8°C
通常, 電路板和電機(jī)緊密地放置在外殼中。因此,要計(jì)算外殼內(nèi)的溫度,還必須考慮電機(jī)的功耗。我們使用的塑料外殼,測(cè)量的熱阻(RthAH)為11 K/W。
電機(jī)損耗(PMotor)僅通過(guò)銅損來(lái)描述,銅損構(gòu)成了大部分損耗,以保持簡(jiǎn)單。假設(shè)電機(jī)相位的電阻 RPhase 為 12 Ω。因此,我們可以計(jì)算電機(jī)的功耗。
PV_電機(jī)= 2x(IPhase_rms 2 xRPh酶)
PV_電機(jī)= 2 x(0.2502一個(gè)阿拉伯?dāng)?shù)字x12Ω)= 1.5 W
有了這些信息,我們就可以計(jì)算外殼中的總功耗(Ptot)。
Ptot=PV_ICmax.+PV_電機(jī)=1.351 W+1.5 W=2.851 W
因此,執(zhí)行器外殼上的溫度梯度(ΔT)由下式?jīng)Q定:
?TAH=PtotWxRTHAHK/W
?TAH= 2.851Wx11K/W=31,36千米
如果將此溫度梯度添加到執(zhí)行器的最大指定環(huán)境溫度(85°C)中,則內(nèi)部外殼溫度為116.4°C。
之前計(jì)算的電路板的最高允許環(huán)境溫度(106.8°C)與現(xiàn)在已確定的外殼內(nèi)部溫度(116.4°C)之間存在10 K的差距。因此,需要采取適當(dāng)行動(dòng)來(lái)彌合這一差距。
僅在需要時(shí)使用
降低功耗的最有效方法是完全不讓它發(fā)生。因此,所有外設(shè)模塊應(yīng)僅在需要時(shí)處于活動(dòng)狀態(tài)。到目前為止,評(píng)估板中最重要的功耗是ADC(8 mA)、BEMF比較器(1.3 mA)和增強(qiáng)型PWM(1.1 mA)。
當(dāng)電機(jī)運(yùn)行時(shí),即使在停留期間,BEMFC和EPWM也必須處于活動(dòng)狀態(tài),以產(chǎn)生保持力。相比之下,ADC并不總是必需的,由于它是最大的功耗,因此可以通過(guò)“按需”操作實(shí)現(xiàn)顯著的節(jié)省。
在我們的步進(jìn)電機(jī)應(yīng)用中,ADC測(cè)量反電動(dòng)勢(shì)電壓,以識(shí)別過(guò)載和與之相關(guān)的步進(jìn)損失。假設(shè)速度為每秒1000個(gè)完整步,則ADC每秒或每毫秒激活1000次。轉(zhuǎn)換時(shí)間為1 μs,每個(gè)事件使用8次順序轉(zhuǎn)換,并考慮預(yù)熱和同步時(shí)間,使ADC總活動(dòng)時(shí)間為每整步20 μs。
因此,平均活動(dòng)時(shí)間(TA)可以按如下方式計(jì)算。
T A=T開(kāi)/T周期=20 μs/1000 μs= 0.02
由此,我們可以計(jì)算出ADC的平均電流消耗(IADC_av)。
IADCav.= 8 mA×0.02=0.16mA
因此,模塊的電流消耗可以降低7.84 mA,相當(dāng)于功耗降低7.84 mA×16 V = 125.4 mW。
優(yōu)化時(shí)鐘速度
在嵌入式執(zhí)行器中,軟件通常是事件控制的,其中動(dòng)作由中斷觸發(fā)。CPU 主要參與后臺(tái)任務(wù)和等待新事件。這些事件可以是內(nèi)部事件(如定時(shí)器中斷)或外部事件(如過(guò)壓或欠壓中斷)。
在非時(shí)間關(guān)鍵型后臺(tái)任務(wù)期間動(dòng)態(tài)減慢 CPU 時(shí)鐘速度可降低電流消耗。一旦出現(xiàn)中斷,CPU可以自動(dòng)切換到最大時(shí)鐘速度,并且可以以最大速度處理中斷服務(wù)例程。在中斷服務(wù)例程結(jié)束時(shí),軟件切換回較低的時(shí)鐘速度。
對(duì)于典型的步進(jìn)電機(jī)軟件,CPU 平均花費(fèi) 40% 的時(shí)間執(zhí)行中斷服務(wù)例程。這意味著 60% 的時(shí)間都花在處理后臺(tái)任務(wù)上;在此期間減慢時(shí)鐘速度將顯著降低電流消耗。
一個(gè)很好的折衷方案是為后臺(tái)任務(wù)選擇 5 MHz 的 CPU 時(shí)鐘速度。最大時(shí)鐘速度的四分之一(20 MHz)可節(jié)省38%的電流(圖4)。因此,總電流消耗(不含電機(jī)驅(qū)動(dòng)器)降低了60%,×38%=22.8%。
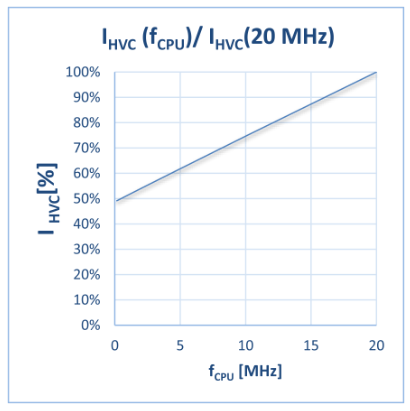
圖 4:TDK HVC 4223F MCU 標(biāo)準(zhǔn)化為 20 MHz 的電流消耗。該行表示當(dāng)前節(jié)省。
HVC 4223F MCU 在所有外圍模塊關(guān)閉的情況下(其中 fYS = fCPU = 20 MHz)的典型電流消耗為 15 mA。因此,可以節(jié)省15 mA×22.8% = 3.42 mA。這種節(jié)省相當(dāng)于功耗降低3.42mA×16V = 54.72 mW。
降低開(kāi)關(guān)損耗
電機(jī)驅(qū)動(dòng)器中的開(kāi)關(guān)損耗由電壓、電流和開(kāi)關(guān)時(shí)間引起。由于外部要求決定了電壓和電流,因此只能改變開(kāi)關(guān)時(shí)間。在這里,我們可以分三個(gè)階段設(shè)置開(kāi)關(guān)速度。在最快的設(shè)置下,與最慢的設(shè)置相比,切換時(shí)間可以減少一半以上。計(jì)算出將開(kāi)關(guān)損耗加法器從電機(jī)驅(qū)動(dòng)器損耗的13%降低到5%。
P電機(jī)驅(qū)動(dòng)器最大值= 2 x(2 x(IPhase_rmsRDSONhs max.+RDSONls max.))x1.05
P電機(jī)驅(qū)動(dòng)器最大值= 2 × (0.2502A2×(2.8 Ω + 2.8 Ω))×1.05 =0.735W
由于最初的功耗計(jì)算為0.791 W,這相當(dāng)于功耗降低了56 mW。但是,請(qǐng)注意,必須仔細(xì)考慮電磁兼容性,因?yàn)檫@種分期技術(shù)可能會(huì)影響個(gè)別情況。
印刷電路板優(yōu)化
QFN 封裝底部的 ePad垂直獲取主熱流。熱量必須從芯片下方傳導(dǎo), 通過(guò)電路板到 PCB 的底層。因此,必須使底層的銅表面盡可能大,以保證水平分布和有效散熱。
由于標(biāo)準(zhǔn)過(guò)孔存在焊料流出的風(fēng)險(xiǎn),我們建議用樹(shù)脂填充并用銅覆蓋它們。我們還建議通過(guò)數(shù)組使用 4×4 或 5×5。再多也只會(huì)導(dǎo)致熱阻略有降低(圖 6)。如果對(duì)機(jī)械穩(wěn)定性的要求允許, 還可以減小電路板的厚度, 因?yàn)榇怪狈较虻臒嶙枧c電路板厚度成正比。
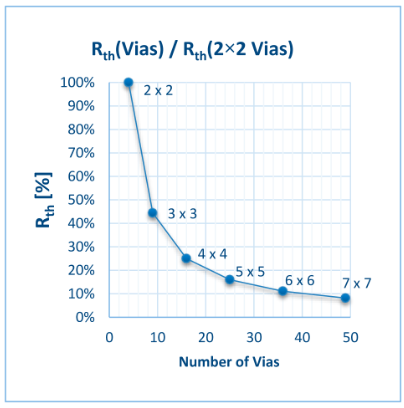
圖 6:通過(guò) 2×2 標(biāo)準(zhǔn)化過(guò)孔的 Rth
通過(guò)最大化連接到ePad的接地層,可以進(jìn)一步改善散熱。通過(guò)布局優(yōu)化,銅表面可以翻倍至約1.5 cm2,從而將熱阻降低2 K/W.與熱阻為32 K/W的原始兩層電路板相比,這些優(yōu)化將其降低到26 K/W。
如果成本不是問(wèn)題,您可以使用四層電路板,通過(guò)將 ePad 連接到額外的內(nèi)層接地層,將熱阻降低到 20 K/W。
將外層的銅層厚度加倍至 70 μm 也更便宜,但效果較差, 這使得該電路板上的銅層厚度減少了 1 到 2 K/W.但是,如果您決定采用此選項(xiàng),請(qǐng)?jiān)谠缙陔A段這樣做,因?yàn)檩^厚的銅層會(huì)影響信號(hào)層的布局。這是因?yàn)楫?dāng)銅厚度加倍時(shí),最小軌道寬度和距離必須幾乎翻倍。
最大凈空
通過(guò)優(yōu)化軟件,IC的功耗可降低238.1 mW。電路板上的優(yōu)化措施將熱阻 (RthJA) 降低了 6 K/W。有了這些新數(shù)字, 我們可以重新計(jì)算電路板允許的最高環(huán)境溫度。
最大 T A =150°C-(1.351 W-0.2381W) ×(32-6)K/W=121.0°C
通過(guò)簡(jiǎn)單且具有成本效益的措施,與電路板最初允許的最高環(huán)境溫度 106.8°C 相比,可以實(shí)現(xiàn) 14.2 K 的改進(jìn)。
功耗降低后沿外殼的溫度梯度的新計(jì)算結(jié)果為:
?TAH=2.851寬-0.2381寬 x 11K/W=28.74千米
與初始溫度梯度 31.36 K 相比,這相當(dāng)于提高了 2.62 K。加上執(zhí)行器所需的最高環(huán)境溫度 (85°C),新的內(nèi)部外殼溫度為 113.7°C。 這縮小了差距,具有 7.3 K 的舒適動(dòng)態(tài)余量。
結(jié)論
對(duì)軟件和電路板進(jìn)行經(jīng)濟(jì)高效的優(yōu)化可以提高應(yīng)用的熱預(yù)算,并為嵌入式電機(jī)控制系統(tǒng)的開(kāi)發(fā)人員提供充足的余量。重要的是,這些改進(jìn)可以在任何嵌入式電機(jī)控制系統(tǒng)上實(shí)現(xiàn)。
TDK-Micronas HVC 柔性伺服驅(qū)動(dòng)器系列能夠以經(jīng)濟(jì)高效的方式開(kāi)發(fā)高性能和緊湊型嵌入式電機(jī)控制系統(tǒng)。它們由 32 位 CPU (ARM Cortex-M3) 提供支持,解決了功耗散熱挑戰(zhàn)。除了我們?cè)谟?jì)算中使用的兩相雙極步進(jìn)電機(jī)外,集成了所有必要功能的微控制器同樣適用于最多三相的無(wú)刷直流 (BLDC) 電機(jī)和有刷直流 (BDC) 電機(jī)。
審核編輯:郭婷
-
嵌入式
+關(guān)注
關(guān)注
5198文章
20449瀏覽量
334104 -
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6955瀏覽量
114103 -
電機(jī)
+關(guān)注
關(guān)注
143文章
9592瀏覽量
154118
發(fā)布評(píng)論請(qǐng)先 登錄
STM32開(kāi)發(fā)中的五大嵌入式系統(tǒng)
什么是嵌入式應(yīng)用開(kāi)發(fā)?
什么是嵌入式操作系統(tǒng)?
嵌入式硬件設(shè)計(jì)解析
C語(yǔ)言在嵌入式開(kāi)發(fā)中的應(yīng)用
嵌入式系統(tǒng)的定義和應(yīng)用領(lǐng)域
嵌入式實(shí)時(shí)操作系統(tǒng)的特點(diǎn)
Java 在物聯(lián)網(wǎng)與嵌入式系統(tǒng)中的應(yīng)用前景與挑戰(zhàn)
芯科科技MCU助力低功耗高效嵌入式系統(tǒng)設(shè)計(jì)
Linux嵌入式和單片機(jī)嵌入式的區(qū)別?
嵌入式直驅(qū)力矩電機(jī)設(shè)計(jì)及其系統(tǒng)仿真分析
嵌入式單片機(jī)在電機(jī)控制系統(tǒng)中的應(yīng)用
嵌入式超聲電機(jī)微步距控制檢測(cè)系統(tǒng)設(shè)計(jì)
超低功耗振蕩器在嵌入式系統(tǒng)中的應(yīng)用




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論