 談一談決策規劃在量產自動駕駛中的挑戰
談一談決策規劃在量產自動駕駛中的挑戰

量產自動駕駛簡介
量產自動駕駛目前分為跨越式和漸進式兩類。跨越式的是希望一步到位直接做L4級別的自動駕駛,主要有兩個點:
第一個是需要有一個特殊的車輛,泛指經過一些做L4的自動駕駛公司改裝后的特殊車輛。
第二個是需要有一個特殊的場景,指用高精度地圖或一些事先規劃好的地域逐漸實現從a點到b點的全自動駕駛。漸進式是先做輔助智能駕駛系統,再迭代實現L4級別的自動駕駛。
隨著行業和產業的不斷發展和成熟,L2+的輔助駕駛近幾年有了一些不錯的成果。L2+量產自動駕駛的主流功能有3個:行車輔助、泊車輔助和主動安。行車輔助里包括車道保持、撥桿變道、導航輔助駕駛等;泊車輔助里包含車位博入、智能召喚、記憶泊車等;主動安全包含防撞輔助、車道輔助、車速輔助等。
輔助的概念實際上是人機共駕,即當司機在開啟輔助駕駛的時候,同時人也會通過方向盤和油門對車輛進行控制。
L2+和L4 Planning的差異
做量產自動駕駛的思路跟L4不一樣的地方在于L4是怎么樣去取代人類司機來開車,而量產自動駕駛思考的角度是讓人開車時更加的安全和輕松,所以替人開車這塊的能力實際上跟L4是差不多,但量產自動駕駛里面會包括更多的東西。
其中一個主動提示/接管現在的思路是希望結合比較強大的一個感知和規控的能力,把輔助駕駛變成汽車軟件層面的安全帶。
L4級別的自動駕駛是能夠在沒有接管的各種路況下很好的駕駛車輛,實際有兩個很重要的前提:第一個是需要事先標注好的高精度地圖,第二個是對于交通參與者以及路面上的一些元素基本上都是一個非常完美的感知狀態。但實際上做L2+的時候,這兩個先決條件不一定成立,一旦離開了高精度地圖或者沒有一個完美感知的時候,該系統表現出來的能力還能像L4一樣。
高精度地圖在當前的情況下存在著兩個最大的問題:第一個是制造的成本很太高,導致覆蓋率很低。第二個是地圖更新做不到實時。覆蓋率低的問題還涉及到產品本身的問題,因為使用自動駕駛能力的一些目標客戶并不是都在有高精度地圖覆蓋的一線城市,可能也存在于一些三、四線城市。
同時這些一線城市并不是所有路段都會有高精度地圖覆蓋。第二個是即便該路端覆蓋了高精度地圖,但其本身也不是掃描一次就足夠,因為真實道路是每時每刻都會發生變化,因此,后期也需要不停的通過手工或半自動的方式去不斷的更新和維護這些地圖。另外一個是感知的不確定性,不確定性主要是來自于上游的感知,實際上感知在通過激光雷達或視覺方案給出的時候,和真值會有一些偏差以及時序上的抖動。
輔助駕駛里最基本的一個能力就是車道保持,即駕駛員不用扶著方向盤,車輛也能準確的行駛在車道中間。在沒有高精度地圖的情況下,車道線主要依靠視覺生成。實際上,這些車道線不可避免的會存在一個特性:離車越遠的車道線,感知誤差會越大,如圖1所示。還有是感知道的兩幀之間會存在一定的偏差,導致方向盤會不斷的抖動。
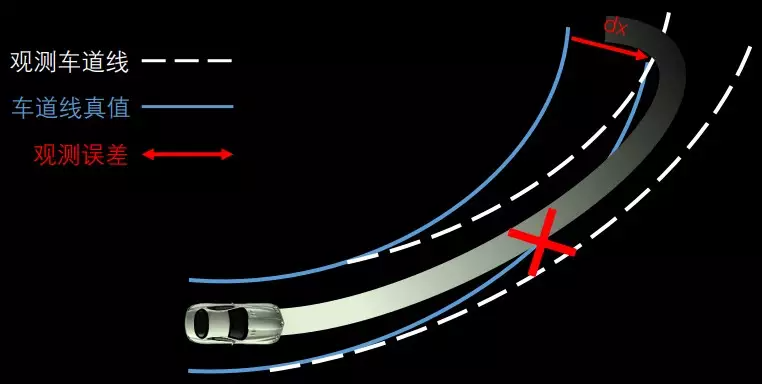
圖1 觀測車道線與真值誤差
Contingency Planning
量產自動駕駛的兩個基本是安全性和舒適性。但這兩個指標實際上是相悖的,因此思考的問題是:如何在沒有好的感知情況下,做一個兼顧安全性和舒適性的自動駕駛產品。
做決策規劃最實用的兩點是:第一是完備性,即盡可能的擴大解空間;第二是最優性,即提升解的質量。
Contingency Planning(防御性規劃)能夠對危急情況隨時做出有效的反應。實際上可以用多模態的問題解決,包括自車的多種可行解以及他車的多種意圖預測。舉一個常見的例子:假設本車發現前面停下一輛車,一般會決策出左繞還是右繞。傳統的做法是假定開始選擇左繞,可能更加符合人的預期,當車開到新的位置,
上游會重新給一個關于車的新位置估計,這時再次進行判斷繼續左邊還是右邊,不巧,左邊發現新的障礙物,決策出需要右繞通行。所以在極端的情況下,最后會出現搖擺不定,畫龍的問題。
目前主流的做法是做一些輸入傾向的提升,這樣只緩解了合法方向的問題,并沒有真正意義上解決問題,因為當前車被檢測出來的這一幀,實際上就已經開始對未來的預期做了一個決策。
目前比較習慣于把軌跡當成一個鏈式模型進行處理,但真正實用的可能是樹模型,如圖2所示。
每個樹模型分叉的節點叫branch state,同時可以在任意的節點分叉,所以該模型比較的靈活。所以利用該模型來做剛剛的案例,開始選擇在離障礙物有一定距離時分叉一下,這樣就是由兩段組成:第一段是公用的部分,第二段是分開的部分。然后以此來分叉判別可以保證方向盤不太會左右晃。即便出現了新的障礙物位置,也可以繼續用軌跡優化。
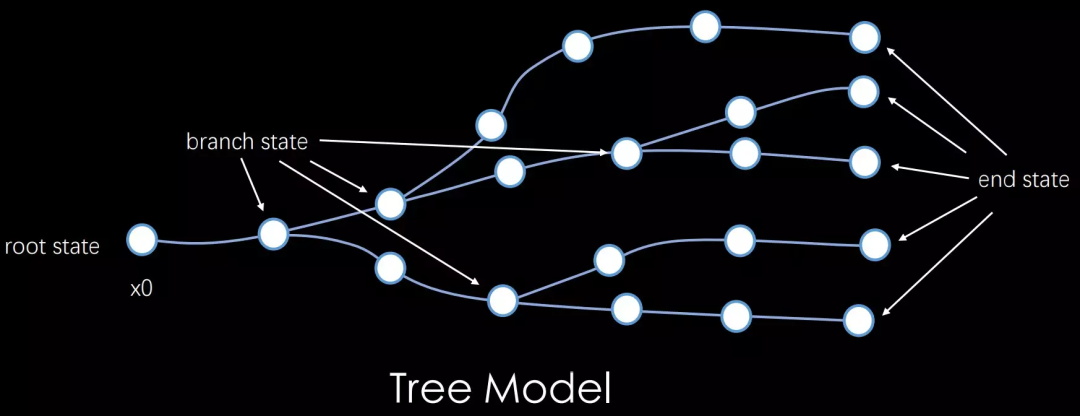
圖 2 樹模型
還有一個很在意功能是加塞應對,即當車輛駕駛時,旁邊開過來一輛車,是需要繼續車道保持還是減速/變道處理。傳統方案對加塞概率進行判定,當大于閾值的時候則會考慮減速/變道處理,這時車就開始減速處理,如果小于閾值,則繼續車道保持。
但加塞和不加塞的概率各占一半的時候,很容易出現決策上的跳動,導致用戶體驗不好。
自動駕駛方法的加塞處理如圖3所示。如果加塞就會開始減速,然后再提速進行跟車,如淺綠色線所示。圖下方是加速度曲線,加速度為0則對應勻速直線行駛,應對加塞時再減速。
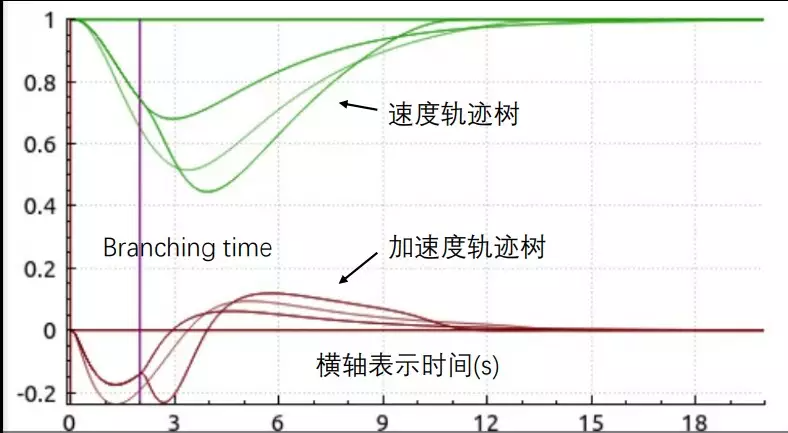
圖3 軌跡樹的加塞處理
Risk-Aware Planning
Risk-aware的概念是保證自動駕駛從a點到b點上整個的安全性。一般通過保證每一幀規劃軌跡是安全的得以實現,實際上有個問題:保證自動駕駛整個周期的安全性需不需要保證每一幀軌跡的安全性?
通常考慮兩個點:第一,軌跡規劃不能撞上一些靜態的障礙物,比如馬路邊、靜止車等。第二與交通參與者的交互有關,比如車輛、行人等交通參與者的未來行為會隨著自車的決策規劃而產生變化。
傳統系統的考慮方式是,當前方突然出現一臉車,那會規劃出一個預測軌跡,再根據預測軌跡在時空域規劃出對應的障礙物,然后規劃出一個不會相撞的軌跡。但當舒適性和安全性出現一定沖突的時候,這樣的規劃思路比較保守。實際上要保證整個自動駕駛周期的安全性,單幀軌跡的規劃性是更高的。
具體來說,預測往往具備一個特性:預測時間越往后,置信度越低。也就是在預測初期是不可能相撞的(比如2秒內),那2秒后是不是可以允許適當的接觸,同時讓規劃出來軌跡的舒適性和安全性之間達到平衡,從而保證整個自動駕駛的安全性。
審核編輯 :李倩
-
高精度
+關注
關注
1文章
802瀏覽量
27074 -
自動駕駛
+關注
關注
793文章
14883瀏覽量
179909
原文標題:談一談決策規劃在量產自動駕駛中的挑戰
文章出處:【微信號:eng2mot,微信公眾號:汽車ECU開發】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
自動駕駛汽車如何完成超車?

自動駕駛汽車如何實現自動駕駛

規劃模塊在自動駕駛系統中主要干了啥事?
汽車自動駕駛的太陽光模擬應用研究

VLA能解決自動駕駛中的哪些問題?

語言模型是否是自動駕駛的必選項?

什么是自動駕駛決策系統?發展有何挑戰?

無引導線的左轉場景下,自動駕駛如何規劃軌跡?

端到端自動駕駛相較傳統自動駕駛到底有何提升?

自動駕駛中感知、決策、控制都起到什么作用?

自動駕駛汽車是如何準確定位的?

自動駕駛中常提的世界模型是個啥?

新能源車軟件單元測試深度解析:自動駕駛系統視角
感知融合如何讓自動駕駛汽車“看”世界更清晰?




 工商網監
工商網監
評論