") 博士生構(gòu)建能控制機器人仿真的NVIDIA Omniverse擴展程序
博士生構(gòu)建能控制機器人仿真的NVIDIA Omniverse擴展程序

“Omniverse 先鋒面對面”系列文章
介紹使用 NVIDIA Omniverse 3D 模擬和協(xié)作平臺推動藝術創(chuàng)作或設計流程的個人創(chuàng)作者和開發(fā)者。
加州大學洛杉磯分校博士生 Yizhou Zhao 憑借用于機器人仿真環(huán)境的“IndoorKit”擴展程序贏得“Extend the Omniverse”競賽。
除專心攻讀統(tǒng)計學博士學位、進行人工智能和機器人領域的數(shù)據(jù)驅(qū)動研究以及開展其愛好的帆船運動之外,Yizhou Zhao 還參加了 NVIDIA Omniverse(一個用于連接和構(gòu)建自定義 3D 管線和元宇宙應用的平臺)開發(fā)者比賽并獲得獎項。
這位加州大學洛杉磯分校的五年級博士生在首屆#ExtendOmniverse 競賽中獲得了第一名。開發(fā)者通過創(chuàng)建Omniverse 擴展程序來參加該比賽即有機會贏取NVIDIA RTX GPU。
Omniverse 擴展程序是向所有用戶開放的、可利用 Python 創(chuàng)建和擴展 Omniverse 應用功能的核心構(gòu)件。
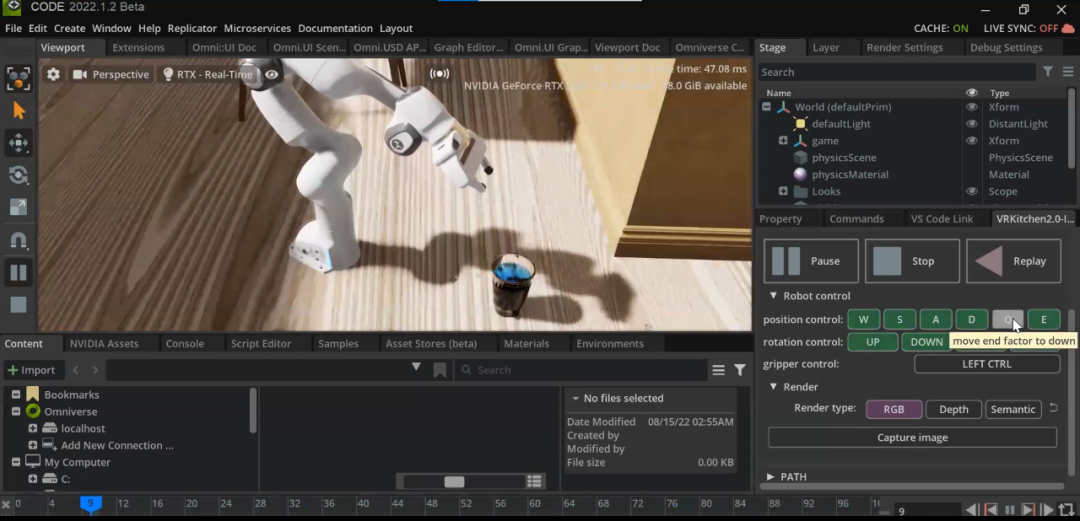
Zhao 的獲獎作品名為“IndoorKit”。用戶可利用該擴展程序在室內(nèi)場景中輕松加載和記錄機器人仿真任務。用戶只需點擊幾個頁面選項,該擴展程序就能利用室內(nèi)環(huán)境、機器人和其他物體來自動填充場景,以設置機器人操作任務。
Zhao 表示:“一般情況下,如果不具備場景構(gòu)建、布局采樣和機器人控制領域的大量技能,很難在仿真環(huán)境中部署機器人任務。我構(gòu)建的擴展程序利用通用場景描述(USD)框架將資產(chǎn)導入強大的 Omniverse 用戶界面,可實現(xiàn)即時場景設置以及對機器人的精確控制。”
在“IndoorKit”擴展程序中,用戶只需要點擊“添加物體”、“添加房屋”、“加載場景”、“記錄場景”等按鈕,就能操縱環(huán)境的各個方面并直接進行機器人仿真。
憑借通用場景描述(USD)這一開源、可擴展的框架,Zhao 借助用于連接 Autodesk Maya 和 Blender 軟件的Omniverse 連接器順利地將 3D 模型導入其構(gòu)建的虛擬環(huán)境中。
“IndoorKit”擴展程序還借助NVIDIA Isaac Sim機器人仿真平臺的資產(chǎn)和 Omniverse 內(nèi)置的PhysX,實現(xiàn)對機器人進行準確、連貫的操縱。
另外,“IndoorKit”還可以隨機調(diào)整場景中的燈光、房間材質(zhì)等。以上視頻重點介紹了 Zhao 使用該擴展程序構(gòu)建的一個場景。
Omniverse 在機器人領域的應用
“IndoorKit”擴展程序架起了一座連接 Omniverse 與機器人仿真研究的橋梁。
Zhao 表示:“很難想象在 Omniverse 出現(xiàn)之前,人們是如何實現(xiàn)精準控制機器人的。”此外,Zhao 還提出了四大理由,來說明為什么 Omniverse 是構(gòu)建該擴展程序的理想平臺:
Python 的普及意味著許多開發(fā)者可以用它來構(gòu)建擴展程序,使更多人能夠開展機器學習和深度學習領域的研究。
在 Omniverse 平臺使用 NVIDIA RTX GPU 可以在很大程度上加速機器人的控制和訓練速度。
Omniverse 的光線追蹤技術可實現(xiàn)實時、逼真的場景渲染。Zhao 表示,與過去相比,他花在實驗設置和仿真上的時間減少了 90%。
Omniverse 平臺的實時高級物理模擬引擎 PhysX 支持各種功能,包括液體、顆粒和柔體模擬等。Zhao 表示,“這些都是機器人研究的前沿領域”。
最后,他說道:“藝術、工程和研究的未來趨勢是將建模、動畫與仿真模擬等一切連接到一起。Omniverse 可以做到這一點。”
審核編輯:湯梓紅
-
機器人
+關注
關注
213文章
31079瀏覽量
222285 -
NVIDIA
+關注
關注
14文章
5594瀏覽量
109759
原文標題:Omniverse 先鋒面對面:博士生構(gòu)建能控制機器人仿真的 NVIDIA Omniverse 擴展程序
文章出處:【微信號:NVIDIA-Enterprise,微信公眾號:NVIDIA英偉達企業(yè)解決方案】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
借助NVIDIA Isaac Sim與World Labs Marble加速機器人仿真環(huán)境構(gòu)建
億緯鋰能受邀出席北大國際博士生學術論壇
NVIDIA Isaac Lab推動機器人技術突破
NVIDIA三臺計算機解決方案如何協(xié)同助力機器人技術
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
NVIDIA Omniverse Extension開發(fā)秘籍

NVIDIA通過全新 Omniverse庫、Cosmos物理AI模型及AI計算基礎設施,為機器人領域開啟新篇章

NVIDIA助力構(gòu)建人形機器人全身遙操作仿真平臺
通過NVIDIA Cosmos模型增強機器人學習

NVIDIA 通過云端至機器人計算平臺驅(qū)動人形機器人技術,賦能物理 AI

盤點#機器人開發(fā)平臺
洞悉Omniverse:如何實現(xiàn)工業(yè)設施數(shù)字孿生中的機器人機群仿真
借助NVIDIA技術提升機器人的移動和全身控制能力

NVIDIA Isaac 是英偉達推出的綜合性機器人開發(fā)平臺
NVIDIA Omniverse Kit 107的安裝部署步驟




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論