 火箭燃料貯箱人孔口蓋的自動裝配
火箭燃料貯箱人孔口蓋的自動裝配

項目簡介
01
項目背景
本課題來源于航天某公司實際項目需求,擬完成火箭燃料貯箱人孔口蓋的自動裝配。
人孔口為航空航天器儲箱上的開口,用于技術人員進入航空器內部進行檢修。在火箭燃料加注完畢后需要人孔口蓋將所有人孔口進行封鎖。
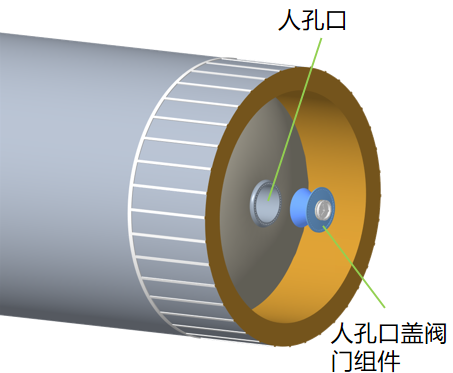
航空器中的每一個艙段均有人孔口和人孔口蓋,方便工人進行在檢查和維修任務,從生產到運行到回收,這種人孔口和人孔口蓋都是必需的。所以高質量地實現人孔口蓋與人孔的組裝是至關重要的。
為了減少人工操作,保證人孔口蓋裝配的穩定性,需要實現人孔口蓋裝配系統自動化。
02
擬解決關鍵問題
壹
/自動巡航,尋找目標位置。
人孔口蓋安裝的工廠面積較大,且人孔口蓋在9個位置有分布。需要選取適合本項目的自動巡航小車,搭載人孔口蓋裝配的核心系統,快速定位,自動運行到合適的安裝位置進行自動化裝配。
貳
/利用機器視覺進行工件位姿求取與定位
人孔法蘭與箱體軸線有不同的角度,所以需要對其進行位姿和角度的識別,用于引導機械臂進行后續操作。另外要實現人孔口蓋與人孔法蘭的對接需要獲取螺孔位置。這需要利用視覺系統進行特征檢測,對圖像識別的算法進行研究,還需要將結果轉化到機械臂坐標系中。
叁
/利用可編程機械臂進行工件抓取及安裝
裝配要求人孔口蓋安裝各邊間隙基本一致,按照對稱性原則對螺母逐級、對稱施加力矩。為滿足裝配要求,減輕工人負擔,提高裝配的精度和穩定性,本項目將利用機械臂代替人工進行裝配操作。
總體擬裝配動畫展示
這個視頻是根據裝配需求以及后續詳細介紹的總體方案制作的人孔口蓋自動裝配系統工作流程動畫。能夠幫助大家更好地了解這個系統,提高后續閱讀的流暢性。
自動裝配總體方案
01
總體結構
本方案設計的火箭燃料貯箱人孔口蓋裝配系統,如圖所示,由自動巡航小車(AGV)、引導抓取視覺系統(簡稱視覺系統1)和螺孔精定位視覺系統(簡稱視覺系統2)、六軸機器人、機器人控制柜、電氣柜、工具快換架、抓具、擰緊工具、人孔口蓋閥門組件及工裝臺組成。
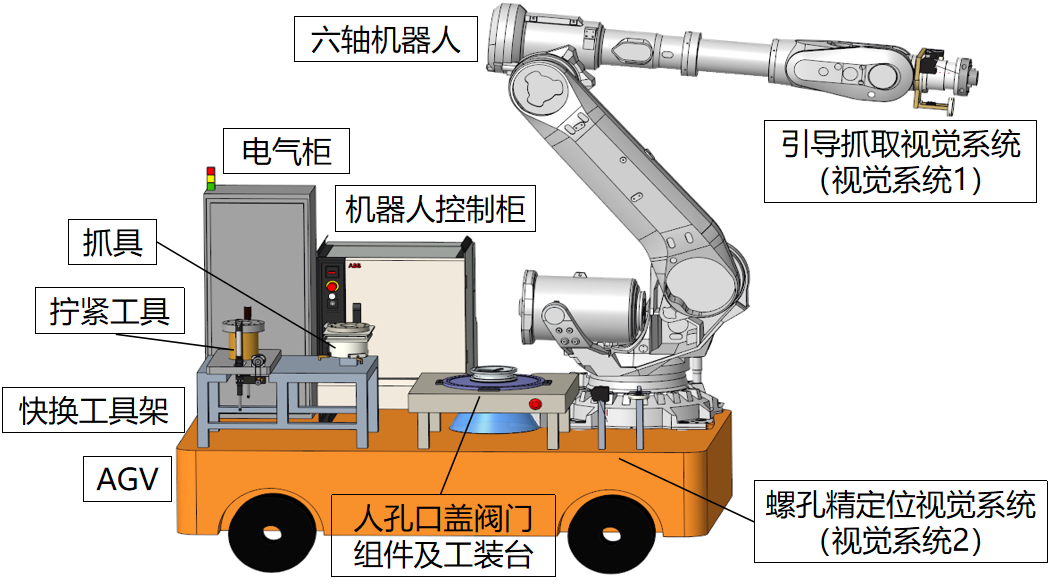
可將系統分為運動執行系統、工作臺及視覺檢測系統。其中運動執行系統以機器人及AGV系統為核心,執行各種運動任務,如AGV搭載整體系統前往裝配位置,機器人抓取、裝配口蓋,擰緊螺母等。工作臺由靜置在AGV上的工具快換架、人孔口蓋工裝臺、電氣柜等組成,用于放置各種工具、人孔口蓋閥門組件及控制器等,方便收納器件,輔助機器人工作。
02
車間布局及裝配流程
車間布局
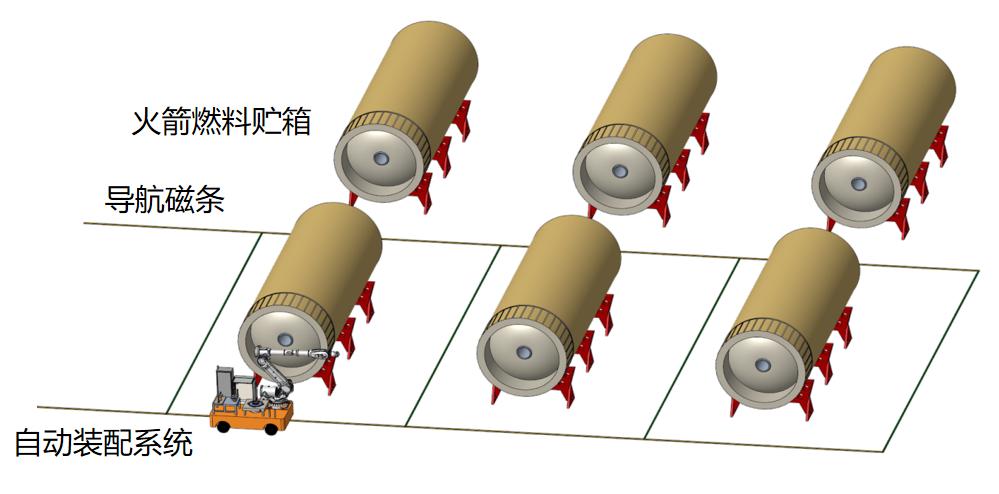
人孔口蓋的裝配任務將在車間進行,為提高裝配效率需提前布局好火箭燃料貯箱的放置位置。將貯箱在裝配車間等間隔放置,AGV行進軌道與貯箱所在軸平行或垂直且有一定距離,給機器人運動留足空間的同時保證人孔法蘭位置在機器人工作范圍內。AGV沿導航磁條行進至待裝配箱體以完成裝配任務。總體布局如上圖所示。
裝配流程
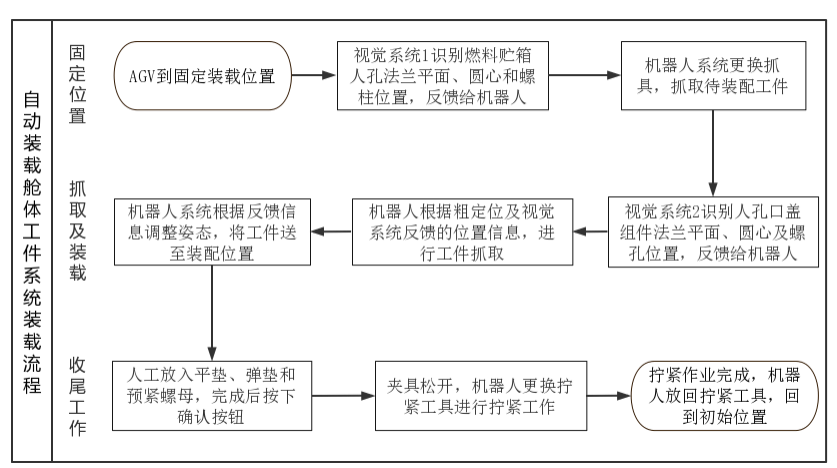
根據火箭燃料貯箱人孔口蓋自動裝配車間的總體布局及總體系統的機械模型,對裝配工作過程進行詳細介紹,如下圖所示。
視覺檢測系統
經過上面的介紹,大家對人孔口蓋自動裝配系統的大致組成和檢測原理有了初步的認識。下面將著重介紹一下該系統中視覺檢測的部分。
01
視覺系統結構
本方案配備兩個視覺系統,分別用于裝配前人孔口蓋與人孔法蘭位置及螺柱、螺孔信息的識別和人孔口蓋螺孔精準位置識別。由于人孔口蓋為金屬材料,邊緣與裝配平面難以區分,常用在機器視覺中的三維雙目視覺系統不再適用。故采用高精度激光位移傳感器與機器人的數據傳輸進行位姿的檢測與調整,使裝配面互相平行,再利用相機進行圓心與螺柱2D位置數據的采集。下面是兩個視覺系統的機械結構。
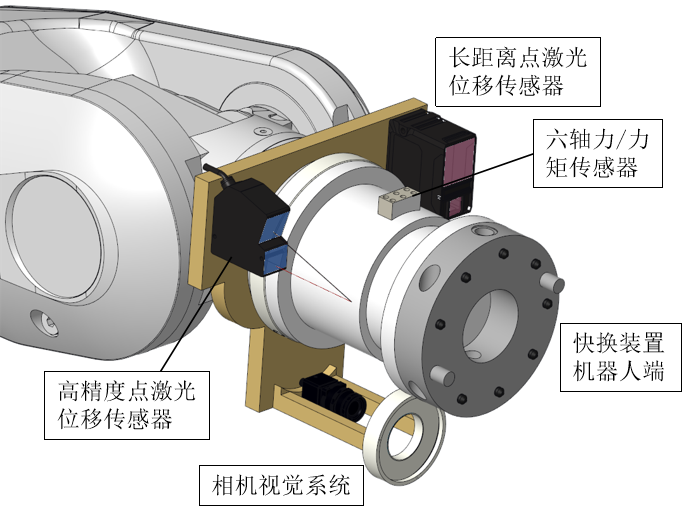
引導抓取視覺系統相機視覺系統、長距離點激光位移傳感器、高精度點激光位移傳感器、安裝支架等組成。
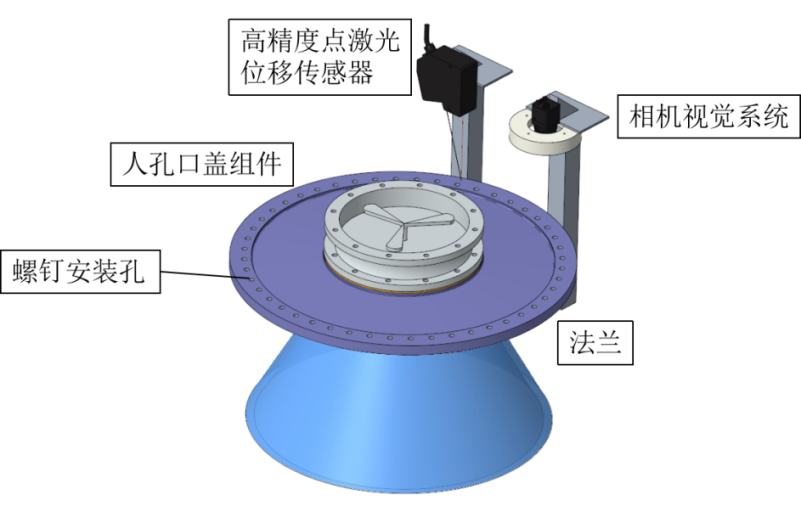
螺孔精定位視覺系統位于AGV上固定位置,由高精度點激光位移傳感器、相機視覺系統、安裝支架等組成。
02
引導視覺系統主要部件選型
1
相機
由于檢測靜止物體,故對于相機幀數要求不需要太高。根據待測物體最大直徑為580mm,選擇視場為600mm×600mm,檢測精度設為0.25mm,則

本方案選取的工業相機,幀率大于16fps,兩個方向分辨率為5496和3672均大于2400。
2
鏡頭
首先根據放大倍數選取合適的焦距,視場大小設為600mm×600mm,選取的工業相機的感光元件的尺寸為12.7mm×9.6mm,所以短邊為9.6mm,由于視場較大,為保證工作距離較小,選取焦距較短的鏡頭,綜合考慮與相機的匹配問題。選取焦距為8mm,2000萬像素級鏡頭。


3
長距離激光位移傳感器
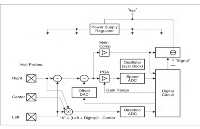
激光位移傳感器是利用激光技術進行測量的傳感器。它由激光器、激光檢測器和測量電路組成。激光傳感器是新型測量儀表。能夠精確非接觸測量被測物體的位置、位移、振動、距離、直徑等。激光有直線度好的優良特性,同樣激光位移傳感器相對于我們已知的超聲波傳感器有更高的精度。
機器人抓取人孔口蓋后,根據預設的程序,機器人末端停在與燃料貯箱人孔口裝配平面大致平行的位置,此時需用長距離激光器探測燃料貯箱位置,由于艙體具有光反射性,故選用長距離回歸反射型不帶反射鏡型激光器,檢測距離高達4m。
4
高精度點激光位移傳感器
利用高精度點激光檢測貯箱人孔法蘭平面的平面位置,及法蘭圓心位置。人孔法蘭平面高出基準弧面約15mm,又考慮到檢測法蘭圓心需較高精度,故本方選取光點類型為小光點型的高精度點激光位移傳感器,可以中和因表面粗糙物體的表面不規則性所產生的漫反射,防止數據波動,測量范圍為80±15mm。
相機

長距離激光位移傳感器

鏡頭

高精度點激光位移傳感器
·選取部件實物圖·
螺孔精定位視覺系統主要部件選型過程類似,就不在此贅述。
03
特征提取算法
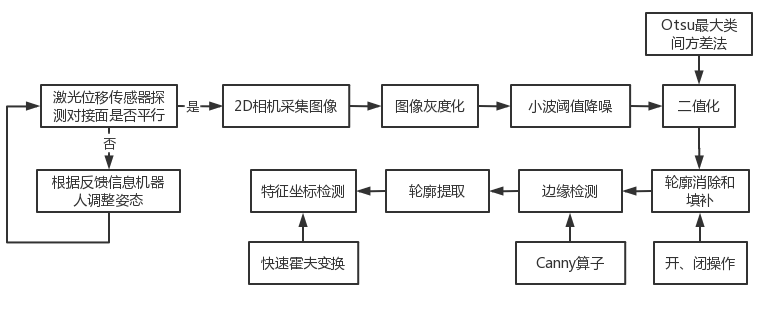
本方案為避免相機位姿檢測帶來的誤差,采用激光位移傳感器檢測對接端面是否平行,機器人根據反饋信息調整姿態,直至對接端面平行。此時2D相機視覺系統采集圖像,進行圖像處理。
在圖像采集過程中,很多外在因素會影響采集圖像的質量,使其有噪聲干擾,為盡量避免圖像噪聲給檢測精度和準度帶來的影響,可以尋找合適的光源強度、入射角度等以使采集圖像質量達到較好效果。另外的圖像預處理過程中,針對特定的噪聲采取對應的解決算法對圖像噪聲進行處理,也可提高檢測精度。預處理包括小波降噪、Otsu二值化、形態學處理,在保留原信號的條件下盡可能減少噪聲,隨后進行Canny邊緣檢測,對圖像輪廓進行提取,并用空間矩求質心的方法檢測圓心坐標,下圖為視覺檢測流程圖。
1
小波閾值降噪
●模型圖像為RGB彩色圖像,為避免條帶失真,方便后續圖像處理,提高運算速度,將其轉化為灰度圖。本算法用cvtColor函數進行灰度圖轉化。
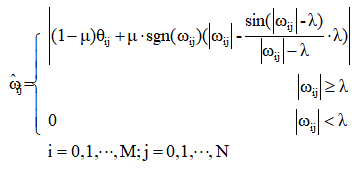
經過灰度處理后,進行圖像降噪處理。本方案采用基于小波變換的去噪方法,它主要特性為在時頻域有多分辨率,所以適合去除圖像的高斯噪聲,同時保留圖像高頻信息。采用一種可調半軟閾值函數,見下式,在節省運算時間的同時,綜合軟閾值方法和硬閾值方法的優勢。小波基選用Haar小波。



2
最大類間方差法(Otsu)圖像二值化
●最大類間方差法(Otsu)是將灰度圖像分為兩個部分,選取閾值T使前景和背景與圖像平均灰度的差值值達到最大,用類間方差表示

其中P0和P1分別為前景和背景的像素數量占比,u0和u1分別為前景和背景的平均灰度值,u為圖像全局平均灰度值。
3
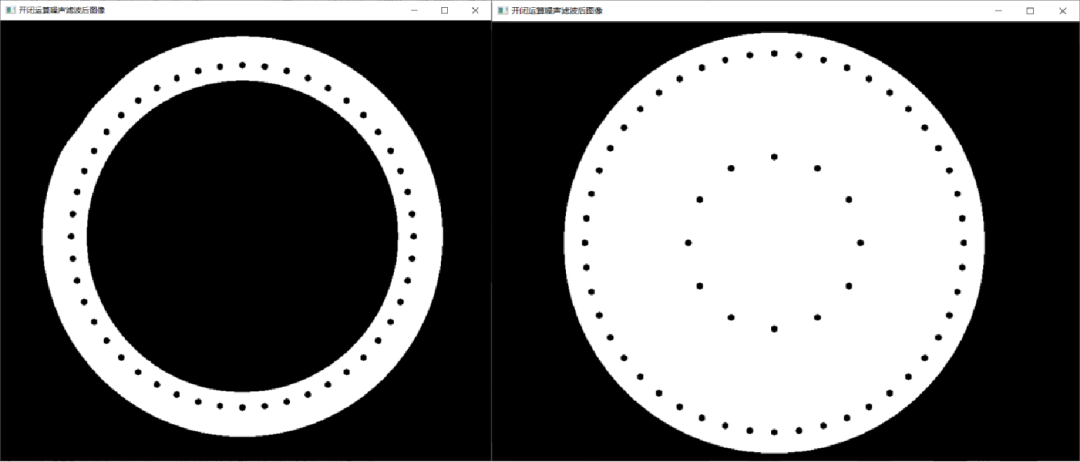
圖像輪廓去除和填補
●經過二值化處理后有一些小裂縫需要填補,且工件一些邊緣凸起輪廓和螺孔接近,需要去除。本算法采用形態學處理中的開、閉運算進行微小輪廓線的去除和填補,關鍵函數為getStructuringElement。開運算用于消除小物體如物體表面的突起;閉運算用于除去小型黑洞。由于本設計中要檢測圓孔特征,故選取尺寸為3×3的圓形核進行卷積操作,保證邊緣平滑,并保留螺孔及圓特征。
4
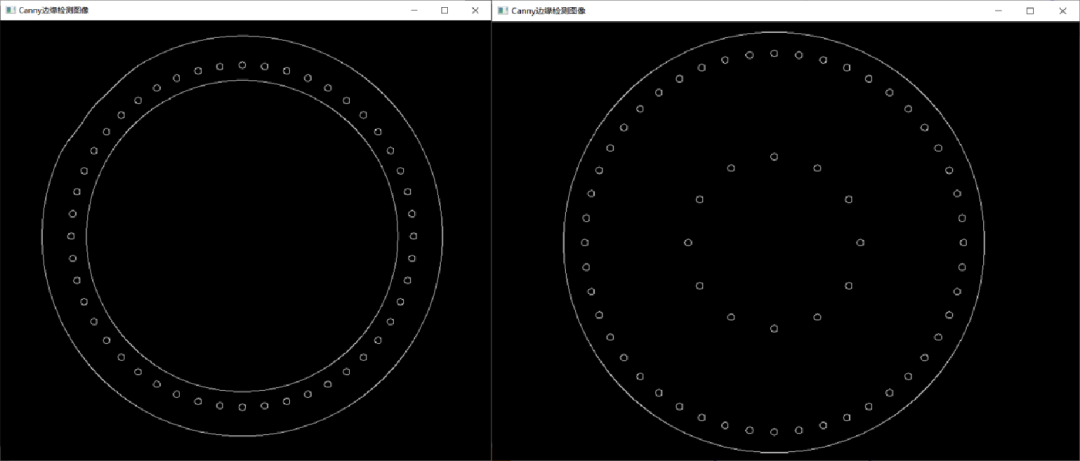
Canny算子邊緣檢測及輪廓提取
●前四步為圖像預處理,下面提取輪廓。首先進行邊緣檢測,常見的邊緣提取算子有Canny、Sobel、Prewitt等,經測試Canny算子的邊緣檢測效果最好。直接采用OpenCV庫中自帶的Canny函數進行輪廓提取。
用findContours函數,對輪廓的檢索模式采用RETR_LIST模式,檢測內圍、外圍所有輪廓,不建立等級關系,彼此獨立。采用CHAIN_APPROX_SIMPLE的表達方式,壓縮水平,垂直或斜的部分,只保存最后一個點。再利用drawContours和存儲有輪廓信息的自定義矩陣counter將輪廓繪制出來。
5
圓心坐標提取
●繪制出輪廓后進行最后一步,即圓心坐標的提取。霍夫變換對噪音的魯棒性強,結果可行度高,常用于圓特征的提取,但是其計算量大,實用性差。由于最終得到的輪廓已經過降噪處理且只保留了圓形部分,可直接提取輪廓中心即為圓心。圓具有中心對稱的特性,采用計算空間/幾何矩的方法來計算圓心,可以減小由圖像處理帶來的誤差,用到的函數為moments。
最終求得各螺柱孔的圓心坐標及人孔法蘭和人孔口蓋的質心坐標,并顯示在圖中。
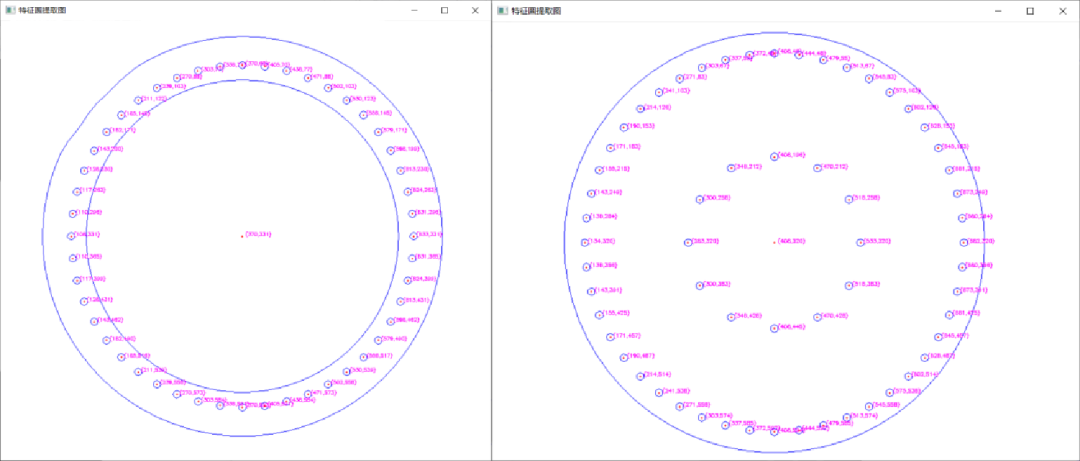
特征提取過程效果圖
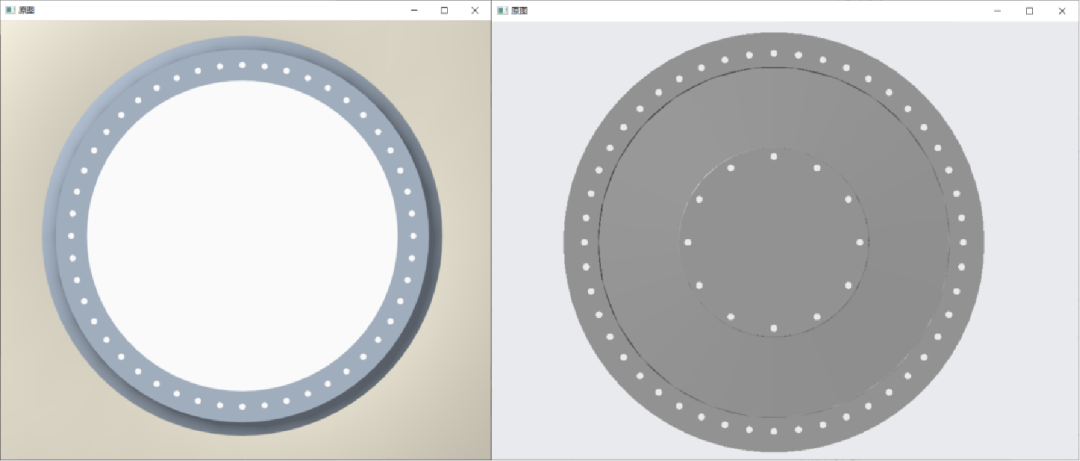
下圖為利用3D打印的縮小版模型搭建的實驗室測試平臺,進行完搭建和像素當量標定后,將人孔口蓋縮小版模型靠著互相垂直的兩個定位塊放置,使得兩切線的垂直線交于人孔口蓋模型圓心。進入軟件的視覺檢測模塊加載像素當量,打開相機進行圖像采集和特征位置提取,獲得人孔口蓋縮小版模型中心的X、Y坐標。人孔口蓋縮小版模型在實驗臺的理論值由游標卡尺測得的定位塊距離及模型直徑獲得。測試15組數據后,從實驗結果得出X、方向定位的最大絕對誤差的絕對值為0.23mm,Y方向定位的最大絕對誤差的絕對值為0.27mm,均小于預設的視覺定位誤差。
火箭燃料貯箱人孔口蓋自動裝配中的視覺檢測技術研究
目前火箭燃料貯箱人孔口蓋自動裝配中的視覺檢測技術研究部分已形成文字,收錄在CTISC 2022 論文集中。大家感興趣的話可以前往EI進行檢索,題目為:Research on Visual Inspection Technology in Automatic Assembly for Manhole Cover of Rocket Fuel Tank。或者點擊最下方閱讀原文查看。
結 語
實現火箭燃料貯箱人孔口蓋自動裝配是火箭成功發射的又一重要保障。本文介紹了裝配系統的總體設計,并著重介紹了其中的兩個視覺檢測系統,主要運用的傳感器為高精度點激光位移傳感器和工業相機。可以實現自動尋找艙體法蘭面、調平、螺孔螺柱位置提取、孔軸自動裝配等功能。該視覺系統稍加改進也可運用到其他的自動檢測方案中。
我們團隊還有很多的實際工程項目,其中各式的傳感器發揮著重要作用,以后小編會慢慢整理并發到公眾號上。今天的介紹就到這里了,大家還想要了解哪方面的科研實例或者傳感器應用可以在評論區留言哦~
審核編輯:郭婷
-
機器視覺
+關注
關注
165文章
4798瀏覽量
126068 -
航空航天
+關注
關注
1文章
462瀏覽量
25832
原文標題:火箭燃料貯箱人孔口蓋自動裝配系統
文章出處:【微信號:傳感技術及應用,微信公眾號:傳感技術及應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
商業火箭低溫推進劑管理系統核心器件選型指南:液位傳感器的工程應用與驗證

智能裝配如何與AR技術相結合
力傳感器在工業自動化機器人中的應用:精確抓取/裝配作業/搬運作業/柔順控制

紅外熱像儀在航空固體燃料燃燒實驗中的應用
智慧物流新篇章:復合機器人重塑裝配車間物料配送

嵌入式計算機AF208:自動化裝配管理集成方案核心

基于RFID技術的醫療箱運輸線自動化追溯方案實現

高精度可編程直流負載箱—專攻氫燃料電池充放電測試與動態消納
富唯智能復合機器人醫療料箱上下料搬運案例
裝配領域的智能工匠:富唯智能人形機器人引領精密制造新紀元
利用NVIDIA Isaac Lab訓練工業機器人齒輪裝配任務
重新定義精密制造!富唯智能高精度裝配人形機器人引領智造革命

借助NVIDIA技術實現機器人裝配和接觸密集型操作



 工商網監
工商網監
評論