") 機(jī)器視覺邊緣模式的檢測方法介紹
機(jī)器視覺邊緣模式的檢測方法介紹

圖像邊緣是兩個具有不同灰度的均勻圖像區(qū)域的邊界,邊緣檢測是圖像處理的基本問題,目的是標(biāo)識數(shù)字圖像中亮度變化明顯的邊緣點,不斷向上構(gòu)成更高層次的特征描述。并且剔除不相關(guān)的特征信息,保留圖像重要的結(jié)構(gòu)屬性。
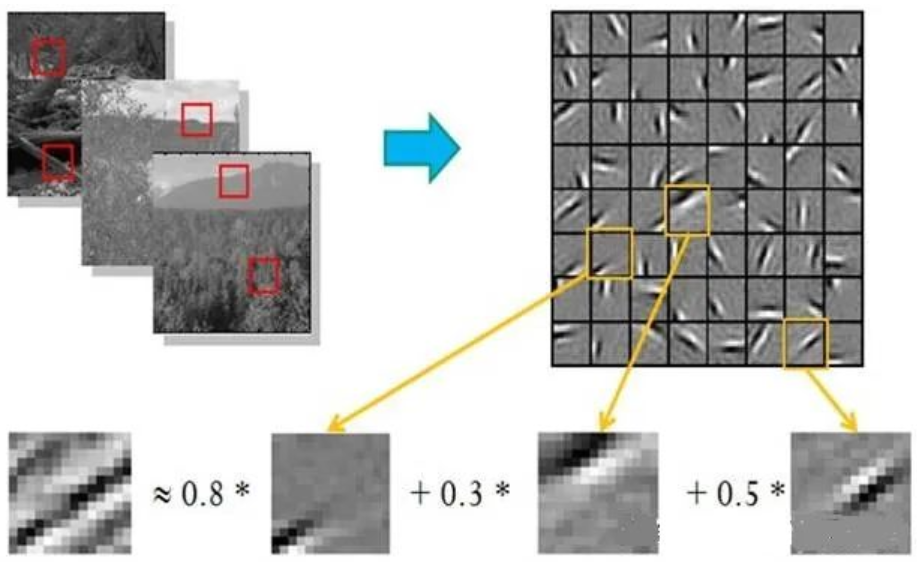
在視覺計算理論框架中,抽取二維圖像上的邊緣、角點、紋理等基本特征,是整個系統(tǒng)框架中的第一步,圖像中局部灰度級以簡單的方式作極快變換的小區(qū)域特征所組成的圖稱為基元圖,在不同"尺度"意義下的邊緣點,在一定條件下包含了原圖像的全部信息。
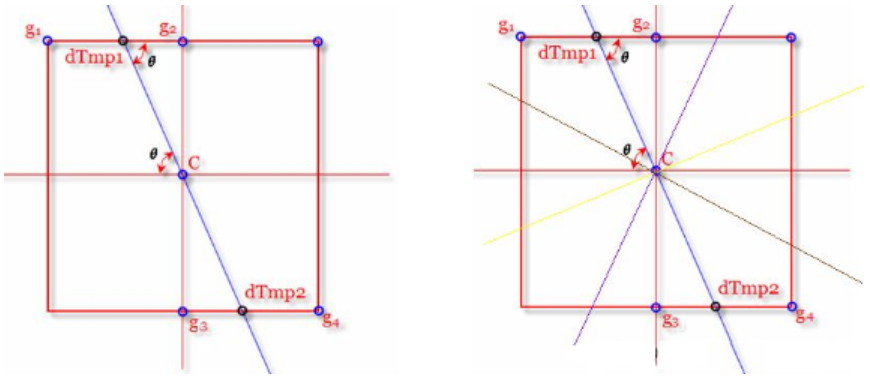
檢測原理基本思想是通過檢測每個像素和其鄰域的狀態(tài),以決定該像素是否位于一個物體的邊界上。如果一個像素位于一個目標(biāo)物體的邊界上,則其鄰域像素的灰度值的變化就比較大,可以通過細(xì)微的間距移動狹窄的區(qū)段,檢測每個點的邊緣寬度與邊緣位置,確定目標(biāo)對象的邊界。
檢測方法
濾波
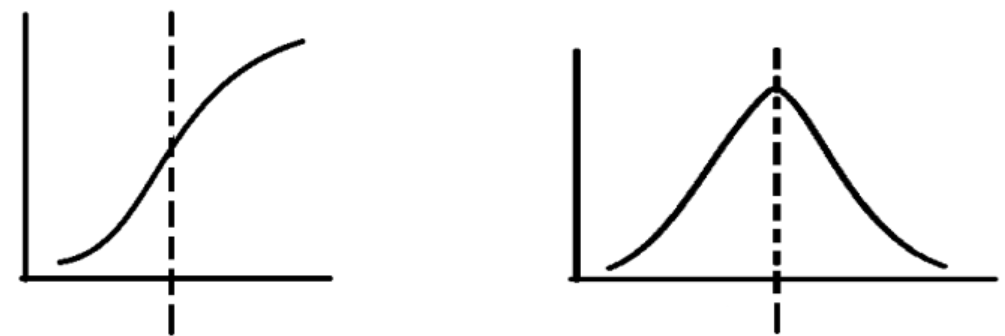
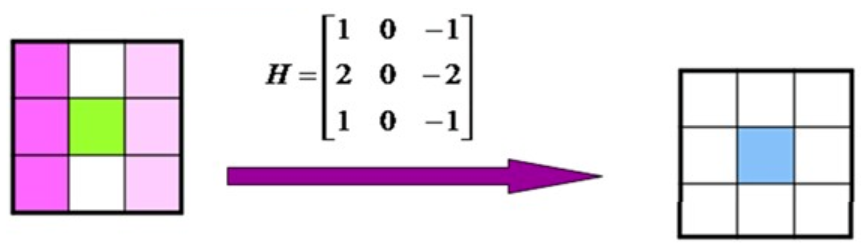
邊緣檢測算法主要是基于圖像強(qiáng)度的一階和二階導(dǎo)數(shù),但導(dǎo)數(shù)的計算對噪聲很敏感,因此使用濾波器來改善與噪聲有關(guān)的邊緣檢測器的性能。大多數(shù)濾波器在降低噪聲的同時也導(dǎo)致了邊緣強(qiáng)度的損失,因此,增強(qiáng)邊緣和降低噪聲之間需要折中。
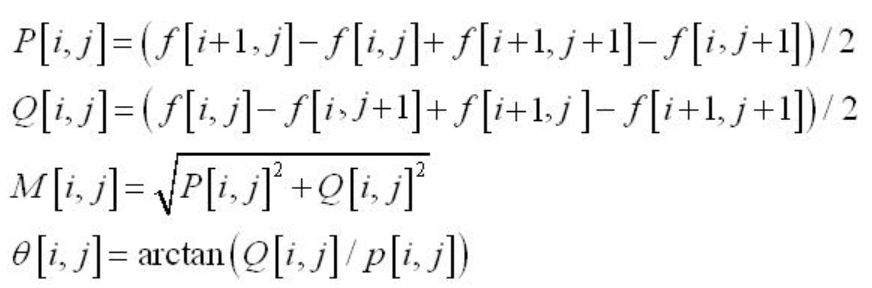
增強(qiáng)邊緣增強(qiáng)一般是通過計算梯度幅值來完成,增強(qiáng)邊緣的基礎(chǔ)是確定圖像各點鄰域強(qiáng)度的變化值。增強(qiáng)算法可以將鄰域(或局部)強(qiáng)度值有顯著變化的點突顯出來。
檢測
在圖像中有許多點的梯度幅值比較大,這些點在特定的應(yīng)用領(lǐng)域中并不都是目標(biāo)邊緣,所以應(yīng)該用某種算法來確定哪些點是邊緣點。
定位邊緣的位置可在子像素分辨率上來估計,邊緣的方位也可以被估計出來。大多數(shù)場合下,僅僅需要邊緣檢測器指出邊緣出現(xiàn)在圖像某一像素點的附近,而沒有必要指出邊緣的精確位置或方向。
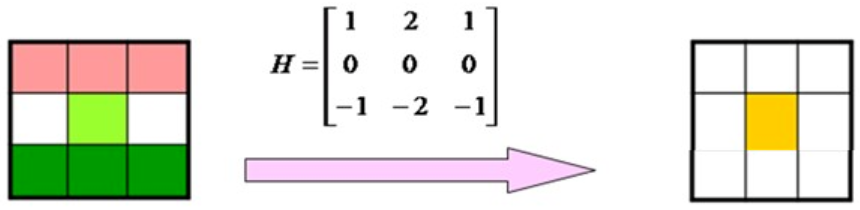
算法應(yīng)用可以將邊緣定義為圖像中灰度發(fā)生急劇變化的區(qū)域邊界,圖像灰度的變化情況可以用圖像灰度分布的梯度來反映,因此我們可以用局部圖像微分技術(shù)來獲得邊緣檢測算子。而邊緣檢測的實質(zhì)是采用某種算法來提取出圖像中對象與背景間的交界線。
在圖像邊緣檢測中,抑制噪聲和邊緣精確定位是無法同時滿足的,一些邊緣檢測算法通過平滑濾波去除噪聲的同時,也增加了邊緣定位的不確定性。而提高邊緣檢測算子對邊緣的敏感性的同時,也提高了對噪聲的敏感性。
如上述所說,一階算子檢測邊緣,如Robert,雖然對邊緣定位精度較高,但是容易丟失邊緣,對噪聲無抑制能力。又如Sobel,對噪聲僅有一點抑制能力,但無法完全排除虛假邊緣。又如二階拉普拉斯算子,對噪聲響應(yīng)很高。或者改進(jìn)后的高斯-拉普拉斯算法,雖然經(jīng)過高斯模糊,但是這些模糊不能完全去除噪聲,沒處理的好,反而會影響邊緣檢測的效果。
審核編輯:郭婷
-
機(jī)器視覺
+關(guān)注
關(guān)注
165文章
4799瀏覽量
126089
原文標(biāo)題:機(jī)器視覺邊緣模式檢測
文章出處:【微信號:vision263com,微信公眾號:新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
機(jī)器視覺鏡頭如何發(fā)現(xiàn)深海沉船
以光為筆,繪就工業(yè)檢測新圖景——機(jī)器視覺光源技術(shù)全面解析

高亮開孔背光源:機(jī)器視覺檢測的"精準(zhǔn)之眼",開啟工業(yè)4.0檢測新紀(jì)元!


自動化設(shè)備機(jī)器視覺檢測光源產(chǎn)品的優(yōu)勢和劣勢
思奧特智能機(jī)器視覺光源:以光為筆,繪就工業(yè)檢測新圖景

思奧特智能視覺側(cè)發(fā)光與平行面光源在視覺檢測中的創(chuàng)新
機(jī)器視覺缺陷檢測中傳感器集成的五大關(guān)鍵

巡檢機(jī)器人落地攻略:RK3576驅(qū)動12路低延遲視覺
工業(yè)視覺網(wǎng)關(guān):RK3576賦能多路檢測與邊緣AI
機(jī)器視覺檢測PIN針
紅外光在機(jī)器視覺檢測中的應(yīng)用




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論