 區分ADAS和自動駕駛概念
區分ADAS和自動駕駛概念

近年來隨著新能源汽車的滲透率越來越高,汽車行業電動化、智能化和網聯化的變革已經被大眾熟悉并逐漸接受。越來越聰明的消費者在購車時不僅僅只是考慮品牌、安全、性能等指標,汽車的智能化程度已經成為消費者心中評判汽車吸引力的核心指標之一。最能體現汽車智能化的功能,第一聯想到的肯定是自動駕駛功能,其次是能帶來優質娛樂體驗的智能座艙。今天我們就汽車自動駕駛展開一些話題。
01區分ADAS和自動駕駛概念
自動駕駛目前主要遵照的是美國汽車工程師學會SAE(Societyof AutomotiveEngineers),在2014年制定了自動駕駛的分級標準,按照汽車是否能控制關鍵駕駛功能的原則,將自動駕駛分為了L0至L5六個等級。
L0:人工駕駛;
L1-L2:輔助駕駛-部分自動駕駛,這個分級對應ADAS(高級駕駛輔助),也是目前汽車比較普及的駕駛級別,預測在2025年滲透率達到70%;
L3:條件自動駕駛,目前部分車企已經宣稱可達到L3級別,但是限于國內政策的原因,并未實際商業化落地;
L4:高度自動駕駛,全球主流自動駕駛車企正在依據不同的技術路線尋求突破;
L5:完全自動駕駛,何時能真正實現還是個未知數。
根據2019年1月全國汽車標準化技術委員會發布的《道路車輛先進駕駛輔助系統(ADAS)術語及定義》征求意見稿,將ADAS的功能分為信息輔助類功能和控制輔助類功能兩部分。
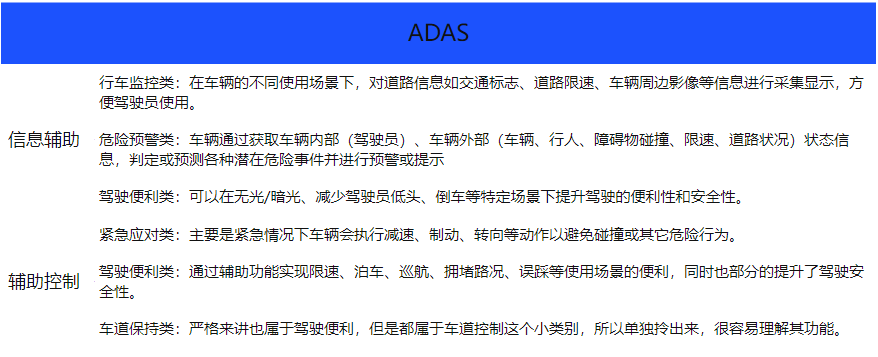
圖一,ADAS功能簡介
02純視覺路線和融合感知路線之爭
毫無疑問,人類絕對不會滿足于目前比較成熟的ADAS(自動駕駛輔助),L4-L5級別的自動駕駛一定是未來的發展趨勢,但是全球不同的車企在汽車自動駕駛感知和決策的技術路線走出了不同的道路。
純視覺路線:典型玩家特斯拉,特斯拉在第三代自動駕駛硬件方案上,一開始有1個前置毫米波雷達,8個攝像頭和12和超聲波傳感器,在2021年5月以后就把毫米波雷達取消了。全球超過200萬輛保有量的規模給特斯拉帶來了龐大真實的高質量免費數據,配合先進的神經網絡算法和匹配自身需求的自研芯片,進行了長期且大量的數據訓練。根據特斯拉2022AI day的說法,在30PB 的數據積累下,每8分鐘就能訓練一個神經網絡模型。
融合感知路線:國外以Waymo為代表,國內就是百度,華為和蔚小理等,以蔚來ET7為例,感知硬件包括1個超遠距激光雷達、5個毫米波雷達、12個超聲波傳感器、14個攝像頭。不同傳感器在功能上是相互補充的,比如從攝像頭中2D的圖片中提取3D的信息是很困難的,這里就可以利用激光雷達去構建3D模型獲取3D信息,同時不同傳感器中獲取相同的信息而形成信息冗余,利用好也可以提高系統的穩定性。

圖二,感知用不同硬件簡介
03自動駕駛決策核心—算力芯片
高算力芯片是實現自動駕駛的基礎,但是目前除了特斯拉采用根據需求匹配自研的方式外,絕大多數車企都采用第三方的算力芯片,如下圖我們截取了部分達到L3級別以上的自動駕駛芯片信息。媒體上通常采用算力來衡量芯片支持自動駕駛能力的強弱,有一種說法是L2級輔助駕駛所需數據量相對較少,計算能力大致僅需要10TOPS,但隨著技術不斷升級,L3和L4級所需數據量將會激增,分別需要約20-30TOPS和200-500TOPS的算力支持。而今年9月份,英偉達和高通先后發布了單芯片算力高達2000TOPS的解決方案,直接掀起了業內巨浪,給其他玩家帶來了沖擊。
表面上看國產新勢力自動駕駛系統目前采用英偉達Orin*4芯片的方案架構算力高到1000TOPS,已經遠高于特斯拉采用FSD*2芯片總算力值144TOPS的方案,但是外界目前還未看到硬件的高配置帶來絕對的優勢。而英偉達最新發布的算力高達2000TOPS的Thor SOC芯片,設計上能夠實現多域計算,可以為自動駕駛和車載娛樂劃分任務,本身就是為中央計算式EE架構所打造,起點就處于更高的層次。
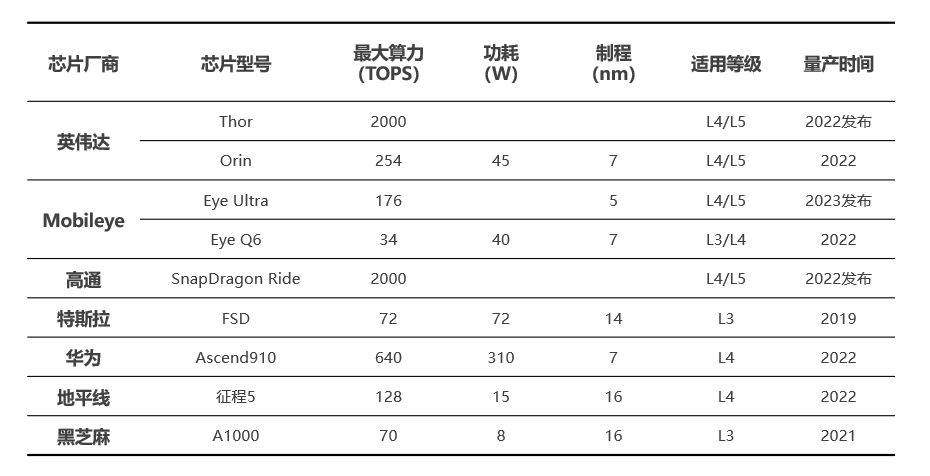
圖三,部分L3級別以上自動駕駛芯片
最后,在不久的未來,汽車中控芯片和各域芯片之間的聯系也日趨緊密,數據傳輸也會遇到諸多挑戰,車規級接口IP作為汽車電子SOC設計的重要組成,奎芯科技也作了諸多布局,比如風頭正盛的專為汽車而生的MIPI A PHY,有興趣的小伙伴可以看一下往期回顧。
審核編輯 :李倩
-
汽車電子
+關注
關注
3045文章
8958瀏覽量
172820 -
adas
+關注
關注
311文章
2330瀏覽量
211936 -
自動駕駛
+關注
關注
793文章
14883瀏覽量
179862
原文標題:汽車電子芯片的革命與創新-系列4
文章出處:【微信號:IP與SoC設計,微信公眾號:IP與SoC設計】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
如何構建適合自動駕駛的世界模型?

自動駕駛汽車如何實現自動駕駛

如何設計好自動駕駛ODD?
自動駕駛中常提的模仿學習是什么?


置信度驗證對于自動駕駛來說重要嗎?

不同等級的自動駕駛技術要求上有何不同?
自動駕駛中常提的ODD是個啥?

邊聊安全 | 以L3級自動駕駛為例,詳解DDT、DDT Fallback、MRC、MRM概念

卡車、礦車的自動駕駛和乘用車的自動駕駛在技術要求上有何不同?

自動駕駛安全基石:ODD

自動駕駛大模型中常提的Token是個啥?對自動駕駛有何影響?
激光雷達技術:自動駕駛的應用與發展趨勢




 工商網監
工商網監
評論