") 使用MathWorks為CAN實現(xiàn)一個分布式電子控制單元 (ECU) 網(wǎng)絡(luò)
使用MathWorks為CAN實現(xiàn)一個分布式電子控制單元 (ECU) 網(wǎng)絡(luò)

此示例在 Simulink 下使用 Vehicle Network Toolbox 為汽車上的 CAN 實現(xiàn)一個分布式電子控制單元 (ECU) 網(wǎng)絡(luò)。使用的 CAN 報文在 CAN 數(shù)據(jù)庫文件canConnectivityForVehicle.dbc中定義。 Vehicle Network Toolbox 提供了 Simulink 模塊,用于通過 Simulink 模型在控制器局域網(wǎng) (CAN) 上傳輸和接收實時報文。此示例使用 CAN Configuration、CAN Pack、CAN Transmit、CAN Receive 和 CAN Unpack 模塊來執(zhí)行 CAN 總線上的數(shù)據(jù)傳輸。
此示例使用了 MathWorks 虛擬 CAN 通道。但是,您可以將模型連接到其他支持的硬件。
模型說明
 ?
?
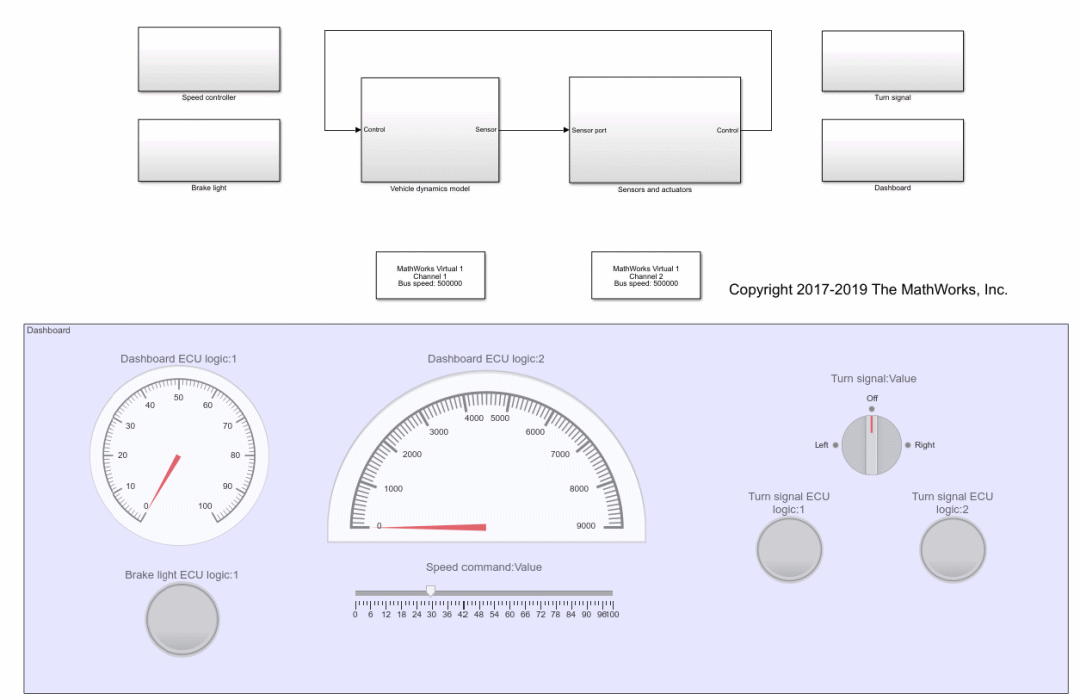
該模型由以下子系統(tǒng)組成:車輛動力學(xué)模型、傳感器和作動器、轉(zhuǎn)向信號、控制板、剎車燈和速度控制器。車輛動力學(xué)模型代表汽車(環(huán)境),其他子系統(tǒng)代表 CAN 總線上的各種節(jié)點。
車輛動力學(xué)模型
該子系統(tǒng)定義汽車的運動方程。輸入是節(jié)氣門體和制動踏板兩個作動器的位置。輸出是引擎 RPM 和車速,它們經(jīng)過多路復(fù)用處理為單個信號。
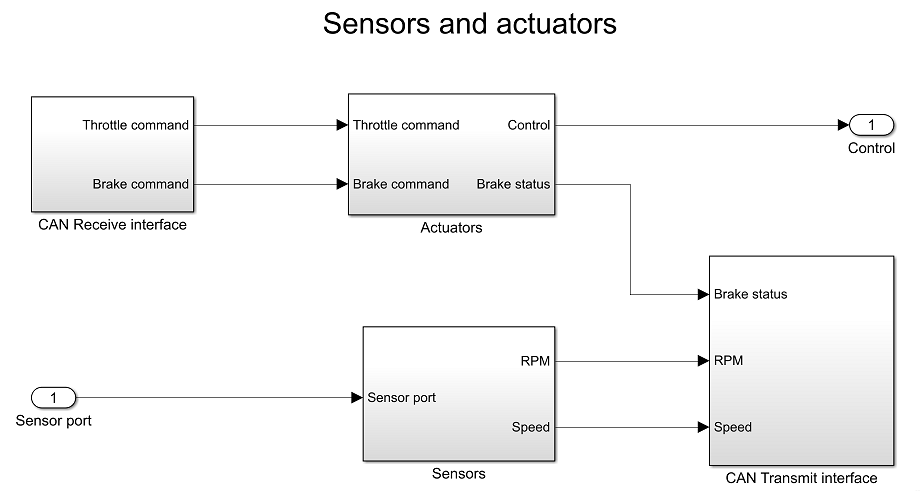
傳感器和作動器
 ?
?
該子系統(tǒng)包含節(jié)氣門體和制動作動器以及 RPM 和車速傳感器。作動器通過 CAN 總線接收節(jié)氣門和剎車命令。作動器輸出(控制)饋送到車輛動力學(xué)模型。 制動作動器還發(fā)送一個信號,通知是否執(zhí)行了剎車。該信號以 100 Hz 采樣并傳輸?shù)?CAN 總線。來自車輛動力學(xué)模型的引擎 RPM 和車速信號輸入到該子系統(tǒng),并且還以 100Hz 采樣并傳輸?shù)?CAN 總線。
控制板
控制板是車輛和駕駛員之間的接口。用戶可以使用滑塊設(shè)置所需的速度 (Speed command:Value)。可以使用旋轉(zhuǎn)開關(guān)操作轉(zhuǎn)向信號 (Turn signal:Value)。 速度命令和轉(zhuǎn)向信號狀態(tài)信號傳輸?shù)?CAN 總線。從 CAN 總線讀取采樣的車速和引擎 RPM,并將其分別顯示在車速表和轉(zhuǎn)速表上。
速度控制器
速度控制器向作動器發(fā)送命令以將車速驅(qū)動到要求的值。從 CAN 總線讀取車速和所需的速度。節(jié)氣門和剎車命令由對應(yīng)的離散比例積分控制器計算。作動器命令傳輸?shù)?CAN 總線。
剎車燈
剎車燈子系統(tǒng)從 CAN 總線接收制動作動器狀態(tài)信號并相應(yīng)地操作剎車燈。只要剎車啟動,剎車燈就會亮起。
轉(zhuǎn)向信號
轉(zhuǎn)向信號子系統(tǒng)從 CAN 總線接收轉(zhuǎn)向信號狀態(tài)報文并相應(yīng)地激活轉(zhuǎn)向信號。當(dāng)旋轉(zhuǎn)開關(guān)設(shè)置為“左側(cè)位置”時,左轉(zhuǎn)向信號燈周期性閃爍,當(dāng)旋轉(zhuǎn)開關(guān)設(shè)置為“右側(cè)位置”時,右轉(zhuǎn)向信號燈周期性閃爍。
審核編輯:劉清
-
傳感器
+關(guān)注
關(guān)注
2576文章
55067瀏覽量
791519 -
CAN總線
+關(guān)注
關(guān)注
145文章
2043瀏覽量
135237 -
ecu
+關(guān)注
關(guān)注
14文章
984瀏覽量
57289 -
Simulink
+關(guān)注
關(guān)注
23文章
551瀏覽量
66064
原文標題:如何使用Simulink實現(xiàn)一個分布式電子控制單元 (ECU) 網(wǎng)絡(luò)
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
瑞芯微(EASY EAI)RV1126B CAN使用

NXP FS23 SBC:汽車電子控制單元的理想之選
RDMA設(shè)計10:指令控制單元設(shè)計?
從 “單一控制” 到 “智能可視”:分布式系統(tǒng)與傳統(tǒng)音視頻控制系統(tǒng)的關(guān)鍵區(qū)別
如何配置和管理MCU分布式模塊化自動測量單元

一鍵部署無損網(wǎng)絡(luò):EasyRoCE助力分布式存儲效能革命

雙電機分布式驅(qū)動汽車高速穩(wěn)定性機電耦合控制
Samtec Auto小課堂 | 汽車電子控制單元基礎(chǔ)

初步了解汽車電子控制單元

抗干擾CAN總線通信技術(shù)在分布式電力系統(tǒng)中的應(yīng)用
使用VirtualLab Fusion中分布式計算的AR波導(dǎo)測試圖像模擬
偉創(chuàng)力與寶馬集團啟動基于Catena-X的電子控制單元數(shù)據(jù)交換
分布式dtu和分散式dtu說明介紹

MCU分布式模塊化自動測量單元:數(shù)據(jù)傳輸與處理能力如何?




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論