") 常見的伺服系統(tǒng)驅(qū)動器
常見的伺服系統(tǒng)驅(qū)動器

伺服系統(tǒng)一般由驅(qū)動器、編碼器以及運動電機共同組成,是能夠?qū)崿F(xiàn)高精度控制的工業(yè)執(zhí)行機構(gòu)。常見的伺服系統(tǒng)驅(qū)動器以及運動電機都是通過線纜連接的,驅(qū)動器的體積重量都比較大。這么設(shè)計的好處是能夠讓電機實現(xiàn)更為豐富的位移運動,滿足更多苛刻的控制需求。當(dāng)然,碩大的體積也制約了這種伺服系統(tǒng)在某些項目里的應(yīng)用,比如AGV小車里空間有限,就塞不下這些常規(guī)的伺服。
既然常規(guī)的伺服系統(tǒng)塞不進去,我們就要考慮哪些緊湊型的伺服了,其實就是盡可能地將驅(qū)動器變小。我們?yōu)榱藵M足大家的相關(guān)需要,將驅(qū)動器、編碼器以及運動電機整合了起來,外形看上去就如同只有一個電機一樣。雖然看起來不大,但電機的輸出功率最大卻能夠到750W。除此之外,還有200W、400W的規(guī)格可供挑選。
那有的朋友會問,緊湊型的伺服就一點缺陷都沒有嗎?當(dāng)然不是,它的散熱相對那些分體式的伺服就差一些,畢竟所有的部分都結(jié)合在了一起,散熱面積減小了。相信隨著技術(shù)的進步,這個問題也有望得到解決,不信你看看原來的智能手機長時間運行多少度,現(xiàn)在的手機什么樣。總的來說,伺服電機一體化智能化是趨勢,這就有點類似移動設(shè)備的MCU,將多個功能集成到一起,用更小的功耗實現(xiàn)更強的性能。
目前我們家的一體式伺服可以使用四種運動模式,包括位置模式、速度模式、轉(zhuǎn)矩模式以及回零模式,支持CANopen總線通訊,能與CANopen通訊的主機控制器協(xié)同使用。
-
驅(qū)動器
+關(guān)注
關(guān)注
54文章
9083瀏覽量
155526 -
編碼器
+關(guān)注
關(guān)注
45文章
3953瀏覽量
142642 -
伺服系統(tǒng)
+關(guān)注
關(guān)注
14文章
606瀏覽量
41778
原文標(biāo)題:緊湊的一體式交流伺服都有啥優(yōu)缺點
文章出處:【微信號:gccanzx,微信公眾號:廣成工控】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
提高步進伺服系統(tǒng)精度的措施

伺服驅(qū)動器最常見的故障及解決方法

伺服系統(tǒng)的常見故障和診斷方法
伺服系統(tǒng)回零運動方向與實際規(guī)劃方向相反問題處理
ADT7100驅(qū)動器是什么以及如何維修
MT6816磁編碼器的伺服系統(tǒng)小型化與高性價比設(shè)計

LXM18與M241進行MODBUS串行通訊案例

伺服系統(tǒng)和單片機有什么區(qū)別
網(wǎng)絡(luò)化多電機伺服系統(tǒng)監(jiān)控終端設(shè)計
伺服系統(tǒng)和PLC各自在什么場合使用
東元伺服驅(qū)動器報警代碼

EtherCAT科普系列(3): EtherCAT技術(shù)在伺服驅(qū)動器領(lǐng)域的應(yīng)用

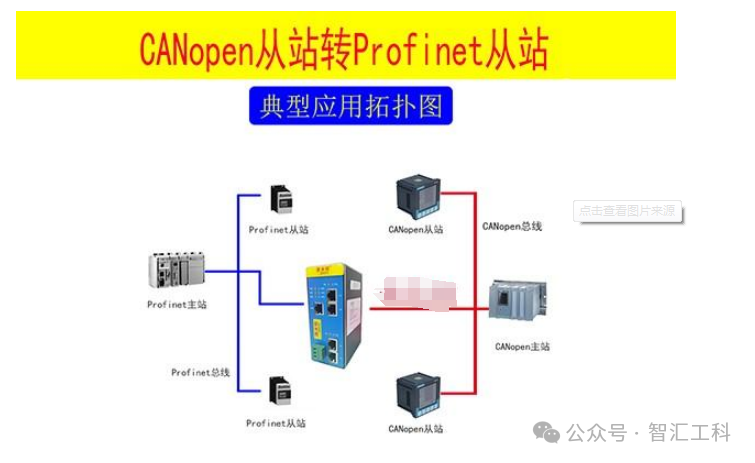
CANOpen轉(zhuǎn)PROFINET網(wǎng)關(guān)連接低壓伺服系統(tǒng)
永磁同步電機伺服系統(tǒng)PI參數(shù)整定
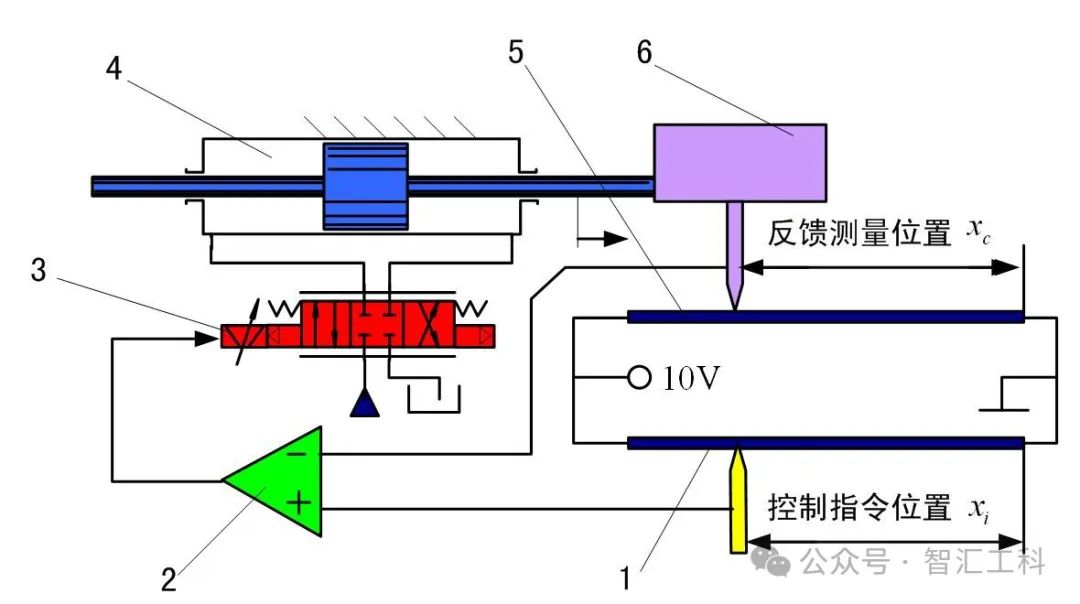
液壓伺服系統(tǒng)工作原理液及優(yōu)缺點



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論