") 如何實(shí)現(xiàn)遙感圖像等超大尺寸圖像快速識(shí)別
如何實(shí)現(xiàn)遙感圖像等超大尺寸圖像快速識(shí)別

一般情況下,遙感目標(biāo)檢測(cè)中,遙感圖像的圖片尺寸都會(huì)很大,且圖像中元素極為復(fù)雜,近期開(kāi)賽的亞馬遜云科技【AI For Good - 2022 遙感光學(xué)影像目標(biāo)檢測(cè)挑戰(zhàn)賽】也不例外,動(dòng)輒超過(guò)10000 x 10000的衛(wèi)星遙感圖像讓許多選手感到頭疼。同時(shí)遙感影像中目標(biāo)尺寸差別大、小而密集、角度各異也導(dǎo)致常見(jiàn)的CV框架難以實(shí)現(xiàn)快速精準(zhǔn)的目標(biāo)識(shí)別。所以,如何實(shí)現(xiàn)遙感圖像等超大尺寸圖像快速識(shí)別?
目前比較成熟的衛(wèi)星圖像識(shí)別算法并不少,但大多依托于強(qiáng)大的計(jì)算資源,為了用有限的計(jì)算資源實(shí)現(xiàn)大尺寸圖像識(shí)別,我們找到了一個(gè)可行的開(kāi)源框架,給大尺寸圖像識(shí)別提供了不錯(cuò)的思路。
YOLT 是一個(gè)基于YOLO v2的衛(wèi)星圖像識(shí)別開(kāi)源算法,核心思路是:
1. 通過(guò)圖片裁切和圖像網(wǎng)絡(luò)重構(gòu)解決圖像尺寸問(wèn)題;
2. 通過(guò)“上采樣”提升小而聚集的目標(biāo)的檢測(cè)精度;
3. 通過(guò)將不同尺寸模型融合,提升整體檢測(cè)精度。
YOLT項(xiàng)目地址:GitHub - avanetten/yolt: You Only Look Twice: Rapid Multi-Scale Object Detection In Satellite Imagery
YOLO是經(jīng)典的圖像識(shí)別算法,YOLT在YOLO的基礎(chǔ)上針對(duì)衛(wèi)星圖像特有的問(wèn)題提出了特定的解決思路。詳細(xì)思路參見(jiàn)論文「You Only Look Twice: Rapid Multi-Scale Object Detection In Satellite Imagery」(GitHub項(xiàng)目中附有論文鏈接)。
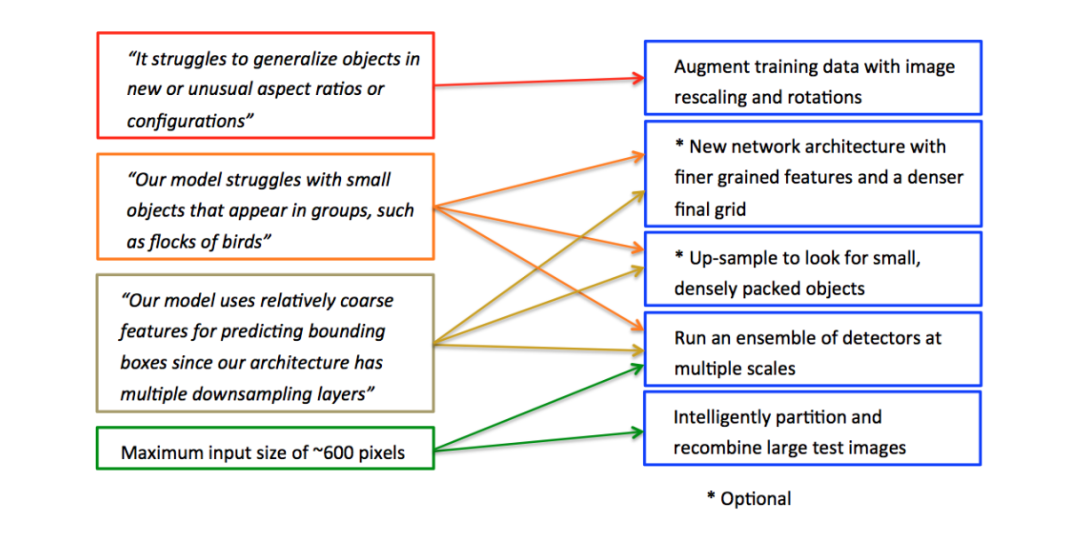
▲左側(cè)為常見(jiàn)問(wèn)題,右側(cè)為解決辦法
1. 針對(duì)物體尺寸不規(guī)則、方向多樣的問(wèn)題,YOLT對(duì)衛(wèi)星圖像數(shù)據(jù)進(jìn)行尺寸變換與旋轉(zhuǎn)等數(shù)據(jù)增強(qiáng)的處理。
2. 針對(duì)目標(biāo)尺寸過(guò)小并聚集的問(wèn)題,YOLT框架主要采用3種方式進(jìn)行處理:
(1) 修改圖像網(wǎng)絡(luò)結(jié)構(gòu),將YOLO v2框架中的stride由32改為16,有利于檢測(cè)出大小在32 x 32以下的目標(biāo)
(2) 對(duì)圖像進(jìn)行上采樣,完成圖片的“解壓縮”操作,即把原先的圖片放大,以便檢測(cè)小而密集的物體
(3) 將不同尺寸的檢測(cè)模型進(jìn)行融合,即Ensemble操作,由于不同目標(biāo)的尺寸差異可能較大,如海港與船只、機(jī)場(chǎng)與飛機(jī),Ensemble操作能夠提升大尺寸差異下的識(shí)別精度。
針對(duì)衛(wèi)星圖像尺寸過(guò)大的問(wèn)題,YOLT采用切塊的方式,將原始圖像切割成小塊后輸入模型進(jìn)行訓(xùn)練,并結(jié)合2-(3)進(jìn)行模型融合。
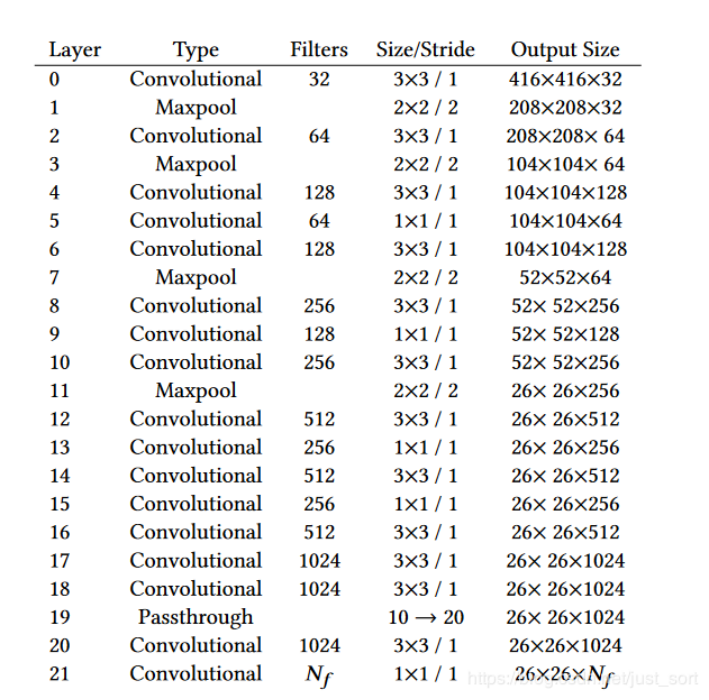
▲ YOLT的網(wǎng)絡(luò)結(jié)構(gòu),輸出特征尺寸多為26 x 26,可以提升檢測(cè)精度
應(yīng)用實(shí)例
從下面的檢測(cè)實(shí)例中,我們可以看到Y(jié)OLT是如何工作的:
首先,開(kāi)發(fā)團(tuán)隊(duì)將一張衛(wèi)星圖片調(diào)整至416 x 416大小(如上左),發(fā)現(xiàn)無(wú)法檢測(cè)出車(chē)輛目標(biāo);而從原圖中切割出416 x 416的區(qū)域(稱(chēng)其為Chips)則可以實(shí)現(xiàn)部分車(chē)輛目標(biāo)的檢測(cè)。
順著這個(gè)思路,開(kāi)發(fā)團(tuán)隊(duì)采用劃窗方式將原始圖像切割為許多chips,并使相鄰chips之間有一定重合(如上圖),以確保圖像檢測(cè)的完整性。再利用NMS算法將重復(fù)檢測(cè)過(guò)濾,最后將各塊的檢測(cè)結(jié)果進(jìn)行融合,即可得出最后的結(jié)果。
▲ 檢測(cè)實(shí)例:采用YOLT v4識(shí)別機(jī)場(chǎng)中的飛機(jī)
YOLT的思路不止可以應(yīng)用于衛(wèi)星圖像識(shí)別,同樣可以在目標(biāo)尺寸小且密集的其他類(lèi)圖像識(shí)別問(wèn)題中發(fā)揮作用。
對(duì)本次亞馬遜【AI For Good - 2022 遙感光學(xué)影像目標(biāo)檢測(cè)挑戰(zhàn)賽】的選手而言,YOLT的解決思路能夠幫助大家越過(guò)圖片尺寸過(guò)大的第一道坎。
原文標(biāo)題:如何實(shí)現(xiàn)超大尺寸圖像快速識(shí)別
文章出處:【微信公眾號(hào):OpenCV學(xué)堂】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
-
衛(wèi)星
+關(guān)注
關(guān)注
18文章
1858瀏覽量
70098 -
模型
+關(guān)注
關(guān)注
1文章
3752瀏覽量
52111 -
遙感圖像
+關(guān)注
關(guān)注
0文章
40瀏覽量
10877
原文標(biāo)題:如何實(shí)現(xiàn)超大尺寸圖像快速識(shí)別
文章出處:【微信號(hào):CVSCHOOL,微信公眾號(hào):OpenCV學(xué)堂】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
EspeedGrab圖像采集軟件介紹(Cameralink轉(zhuǎn)USB采集)
RK3588采集Cameralink圖像快速搭建系統(tǒng)辦法
ADTF驅(qū)動(dòng)海康威視相機(jī)及qt圖像顯示操作流程#海康威視#傳感器#數(shù)據(jù)采集#配置#圖像識(shí)別
【Sipeed MaixCAM Pro開(kāi)發(fā)板試用體驗(yàn)】基于MaixCAM-Pro的AI生成圖像鑒別系統(tǒng)
基于米爾MYC-YM90X安路飛龍DR1開(kāi)發(fā)板儀表圖像識(shí)別系統(tǒng)開(kāi)發(fā)
火車(chē)車(chē)號(hào)圖像識(shí)別系統(tǒng)如何應(yīng)對(duì)不同光照條件下的識(shí)別問(wèn)題?

多光譜圖像技術(shù)在苗期作物與雜草識(shí)別中的研究進(jìn)展
工業(yè)相機(jī)圖像采集卡:機(jī)器視覺(jué)的核心樞紐

基于LockAI視覺(jué)識(shí)別模塊:C++使用圖像的統(tǒng)計(jì)信息
基于LockAI視覺(jué)識(shí)別模塊:C++使用圖像的統(tǒng)計(jì)信息

基于LockAI視覺(jué)識(shí)別模塊:C++圖像的基本運(yùn)算
基于LockAI視覺(jué)識(shí)別模塊:C++圖像的基本運(yùn)算
基于LockAI視覺(jué)識(shí)別模塊:C++圖像采集例程



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論