 如何應用微極彈性輔助機器人構建
如何應用微極彈性輔助機器人構建

隨著人工智能技術的進步,智能機器人產業如雨后春筍般蓬勃發展。實際上,“機器人”一詞最早出現在1921年卡雷爾·卡佩克(KarelCapek)創作的一部科幻劇中。
目前大多數機器人,無論其大小,通常都是通過一系列復雜的制造步驟構建的,這些步驟集成了機身、電子和有源組件。與用提供不同功能的獨立部件來建造機器人相比,用多功能超構材料建造的機器人具有一定的優勢。超構材料是一種由重復圖案組成的合成結構,旨在表現出理想的宏觀特性。與大宗材料不同,超構材料的行為受其工程結構的制約,而不是純粹由其材料構成驅動。增材制造技術,如3D打印,已經加速了復雜的超構材料的制造,其尺寸越來越小,功能也前所未有。傳統上,制造機器人依賴于組裝離散的執行器、傳感器、微處理器和電源。機器人超構材料通過在超構材料的周期性結構中構思自主性來挑戰這種模式。
從以往的研究上看,超構材料的研究主要集中在光學應用上,例如具有超出普通透鏡和反射鏡能力的可調諧光學特性的超構材料。然而,近年來,研究人員越來越多地轉向在其他領域采用這種設計原理。比如無需使用傳動齒輪即可將線性運動轉換為旋轉的機械超構材料,或能夠按需調整剛度或變形等體積特性的鑲嵌機器人群。創造機器人超構材料的另一條途徑是在結構中體現“機器人任務”。例如,人們可以設計一種超構材料,其變形可以通過電信號進行控制。
鑒于此,最新一期《Science》期刊在線發表了加州大學洛杉磯分校的鄭小雨教授團隊的新成果。該團隊開發了一種新的設計策略和3D打印技術,可以一步構建機器人。崔華晨為第一作者。
具體而言,研究人員開發了一種合理設計壓電超構材料的方法,應用微極彈性,通過在平移之上結合旋轉來擴展經典彈性,從而輔助機器人構建(圖1)。
圖1 示意圖
此外,研究人員引入了一種方便且強大的策略來構建3D空間中的壓電活性、導電和結構相(圖2A)。因為現有的壓電張量不足以描述所有的自由度,研究人員在Cosserat固體的基礎上定義了廣義壓電張量來描述架構壓電材料的應變轉換(圖2B)。微結構的具體結構(晶胞)如圖2(C-K)所示。
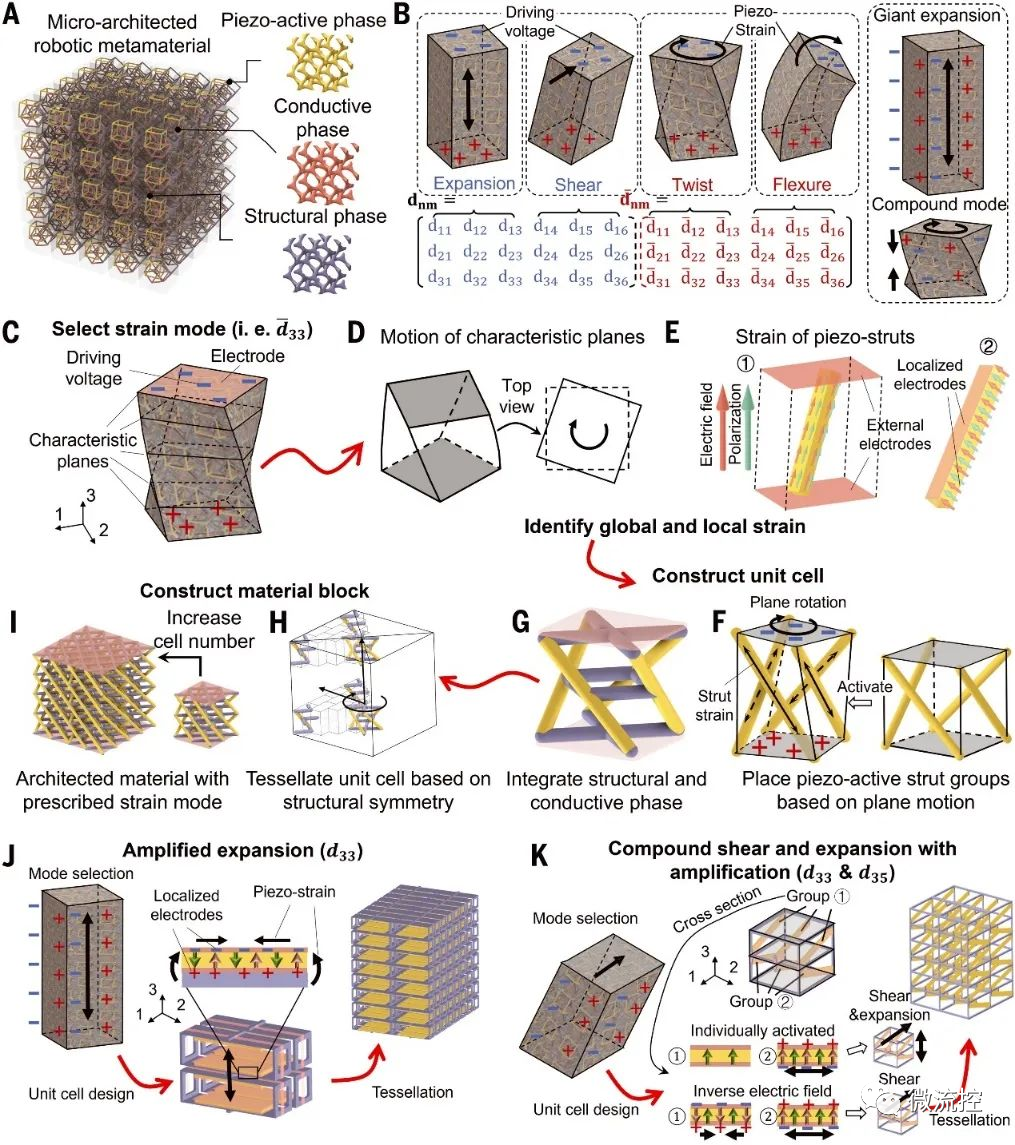
圖2 具有任意應變模式的機器人超構材料的合理設計
在此基礎上,研究人員開發了一種電荷程序化多材料增材制造技術,能夠將壓電活性相、結構相和導電相組裝成復雜的3D微架構。首先,通過多材料3D打印系統(材料和方法)打印帶負電荷的樹脂和高負載的納米粒子膠體,如圖3A所示。然后將導電相選擇性地沉積在帶電樹脂上,形成帶有電極的3D微架構(圖3B)。此外,氧化鉛用于提供液體密封和富鉛環境,以抑制PZT在高于800°C的溫度下的鉛蒸發(圖3D)。這種3D制造方法允許制造具有精確、微尺度3D結構和低孔隙率的壓電活性材料(圖3E-3H)。總之,研究人員使用具有空間編程靜電荷的多材料立體光刻系統,并在選定區域制造了裝飾有導電金屬和壓電特性的3D陶瓷晶格。
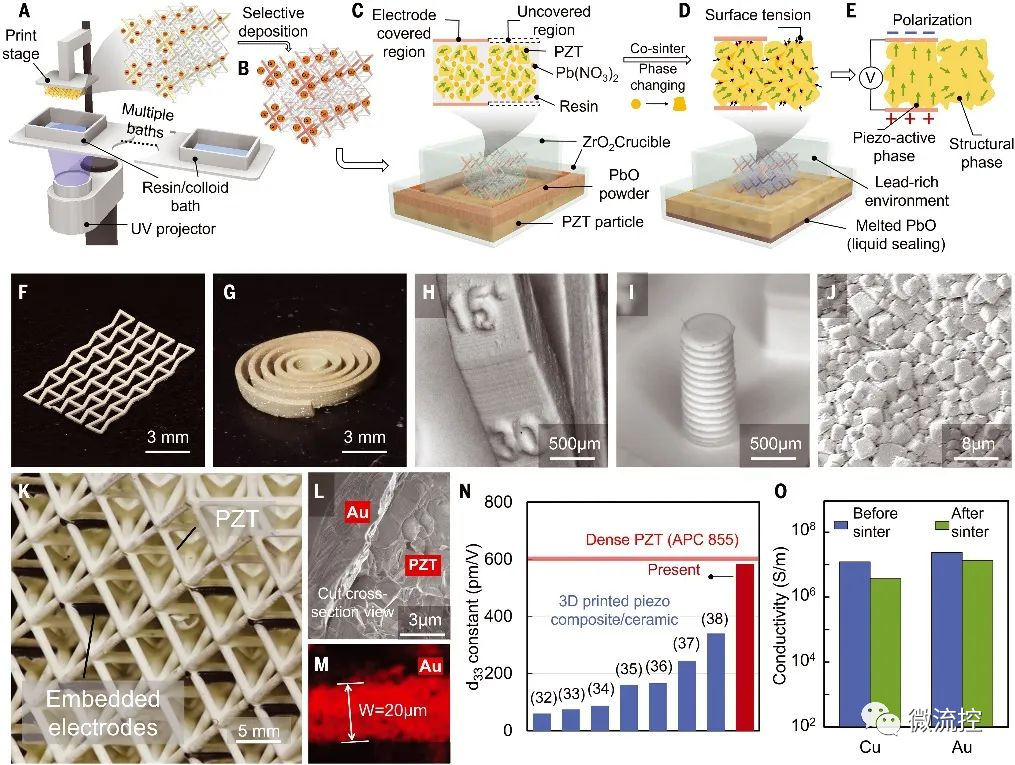
圖3 多材料制造平臺
由增材制造的機器人超構材料可以使用電場到機械應變的雙向轉換來產生運動和傳感。逆壓電效應賦予機器人驅動能力,而直接和雙向壓電效應分別通過本體感受(自我監測)和外感受(接觸檢測和遙感)實現反饋控制。超構材料的拓撲結構允許將電極直接放置在壓電活性支柱上,從而產生更強的電場并放大驅動應變。
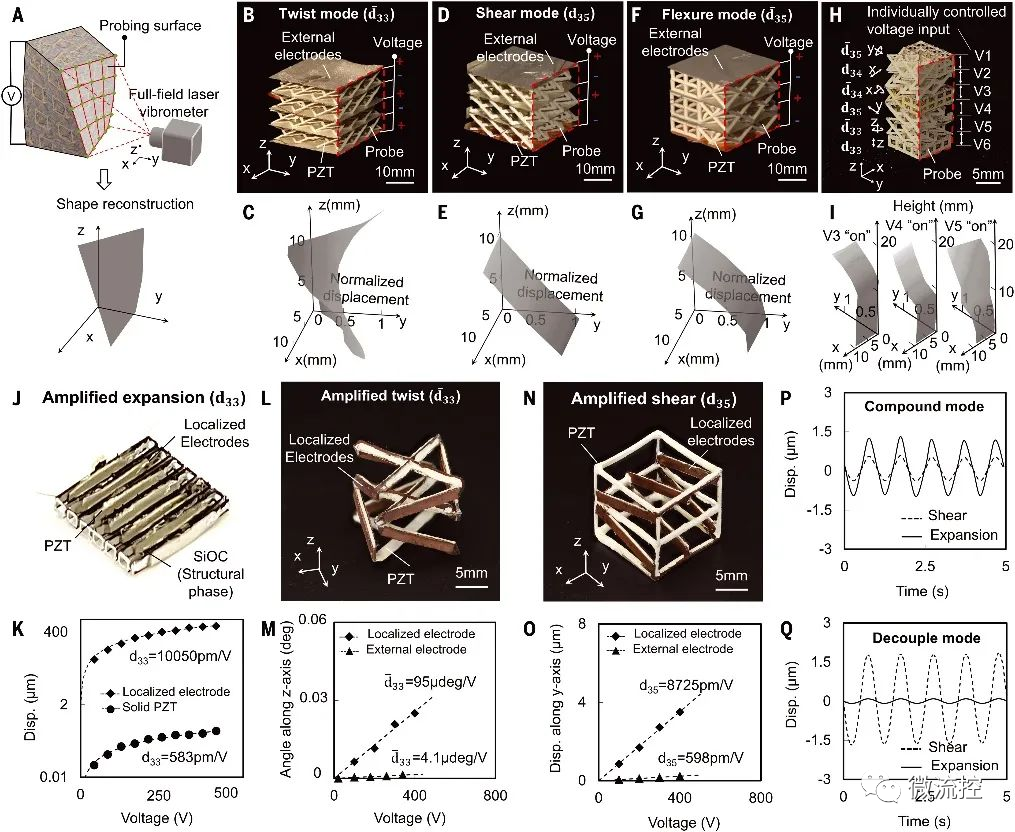
圖4 機器人超構材料設計的實驗驗證
同時,研究人員巧妙地將驅動和感知系統集成在一個輕巧的微型復合3D格子中,該格子可以四處移動并感知周圍環境。這種系統級集成雖然很少見,但可以充分挖掘現實世界場景中快速發展的機器人材料的全部潛力,并找出它們的缺點。考慮到這里討論的移動壓電超構材料,壓電活性元件的布線仍然是增強其多功能性的限制因素,而分配功率和分散控制仍然是需要克服的障礙。
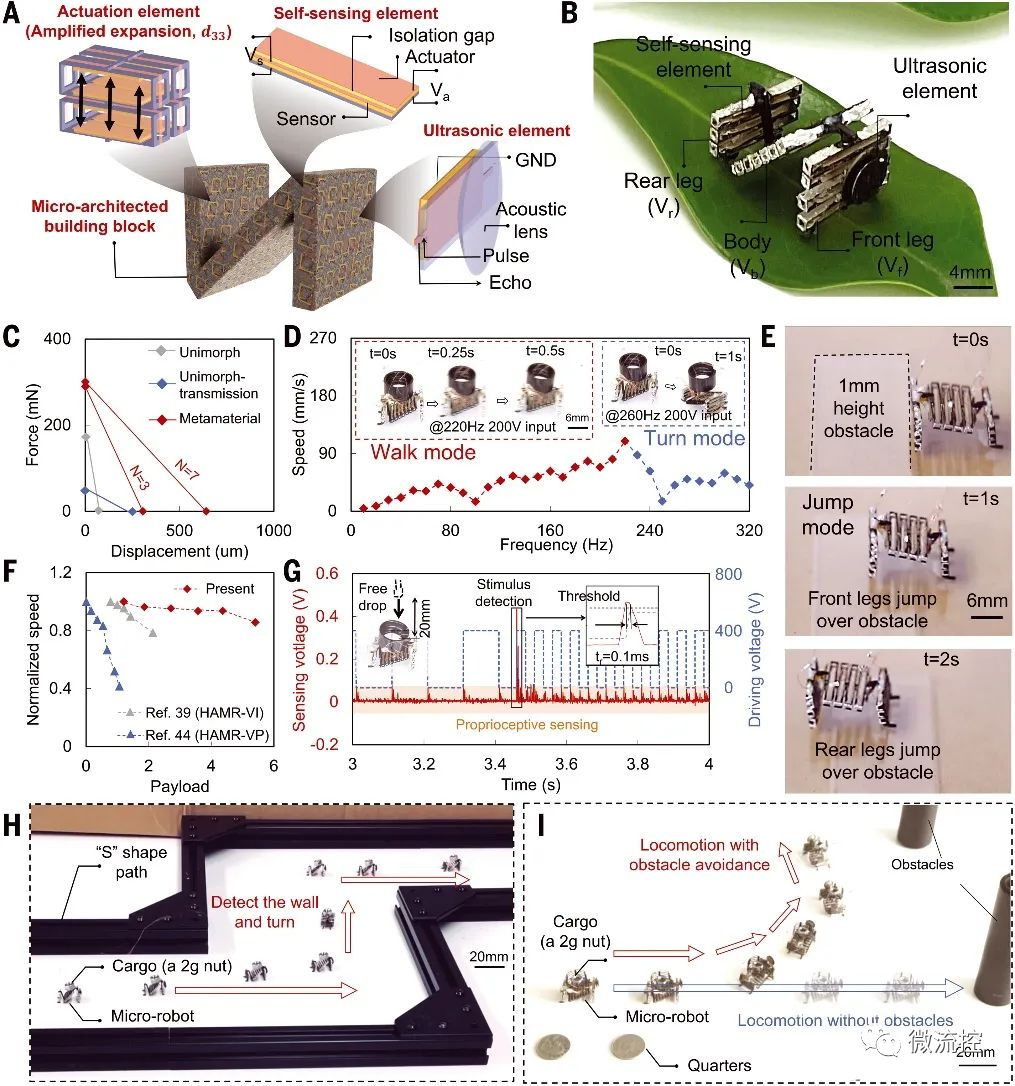
圖5 刺激響應多模式移動微型機器人
原文標題:3D打印壓電超構材料,可以實現自主感知、導航機器人
文章出處:【微信公眾號:微流控】歡迎添加關注!文章轉載請注明出處。
-
機器人
+關注
關注
213文章
31079瀏覽量
222255 -
3D
+關注
關注
9文章
3011瀏覽量
115052 -
人工智能
+關注
關注
1817文章
50098瀏覽量
265374
原文標題:3D打印壓電超構材料,可以實現自主感知、導航機器人
文章出處:【微信號:Micro-Fluidics,微信公眾號:微流控】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
中國科學院研發3D手型微納機器人
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
小蘿卜機器人的故事
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
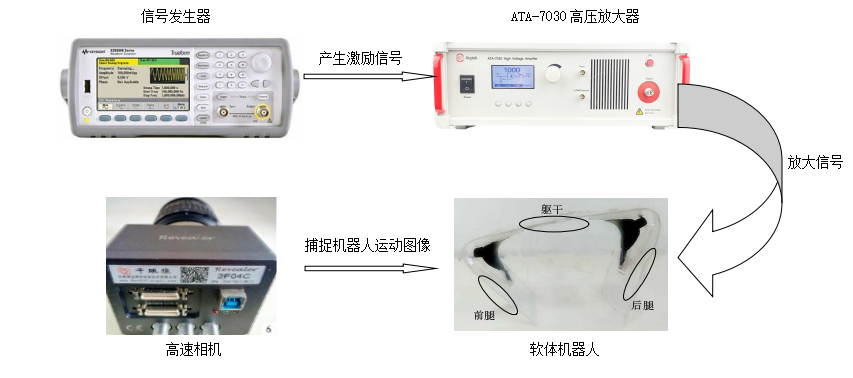
介電彈性體軟機器人研究:高壓放大器的應用實踐

工業機器人的特點
安泰高壓放大器在微納機器人研究中的應用介紹
盤點#機器人開發平臺
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
【「# ROS 2智能機器人開發實踐」閱讀體驗】+ROS2應用案例
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
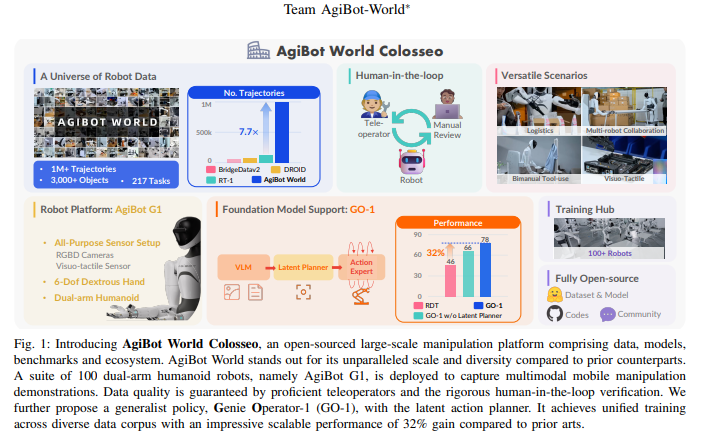
AgiBot World Colosseo:構建通用機器人智能的規模化數據平臺



 工商網監
工商網監
評論