 博塞線測量的原理
博塞線測量的原理

系統布局設計
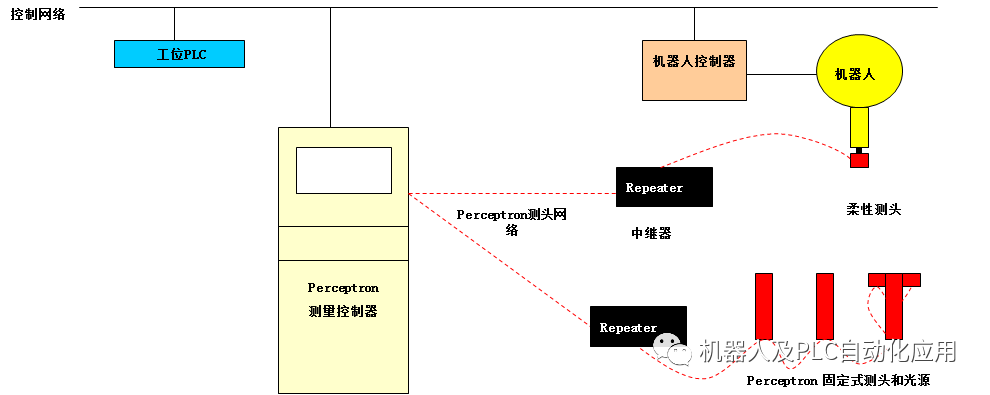
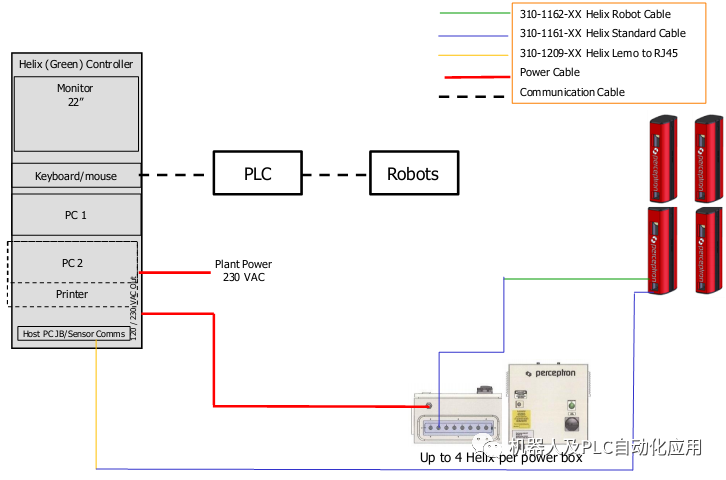
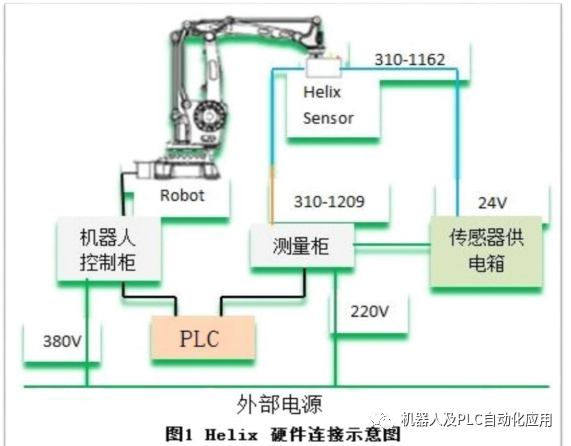
測量控制柜
測頭網絡
q每個測量控制柜支持多達144個測頭
q固定式測頭、機器人測頭和外部光源共用一個網絡連接
q在這個網絡的末端測頭需要加終端電阻。
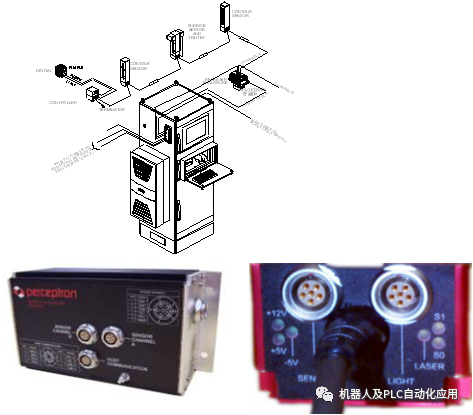
測頭
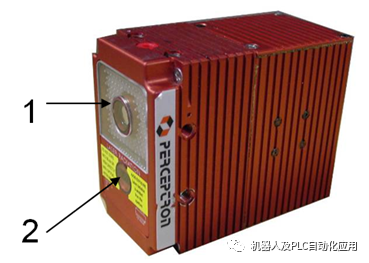
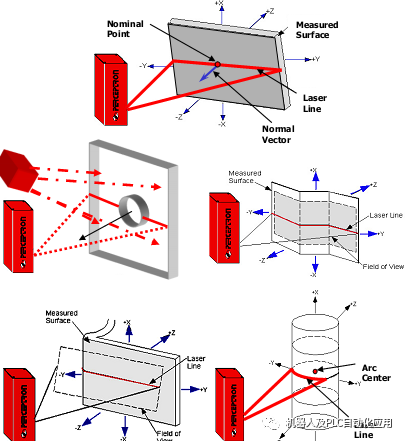
原理: 測頭發射出光線,利用光的漫反射三角成像測出距離的
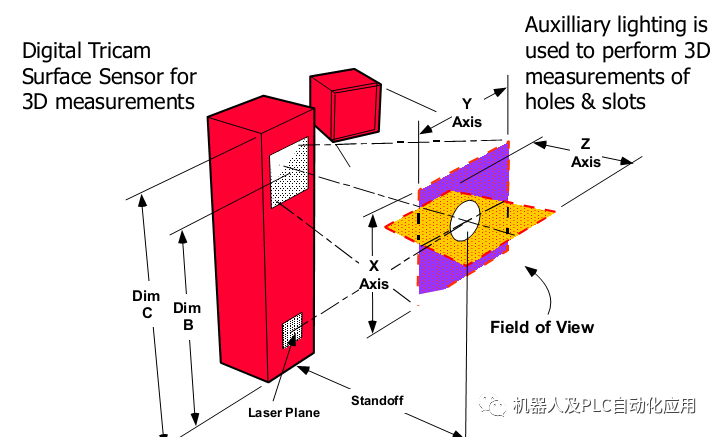
如圖示1通過LED燈可以產生光束對孔和面進行測量
如圖示2通過發光體可以 產生光線對點進行測量
激光所產生的波長是650NM
測頭到工件的距離一般是(80-120MM)
測量算法原理:
被測量零件所在的坐標系。通常被理解為車身原點所在的坐標系。AutoGauge系統最終測量結果將在這個坐標系內。
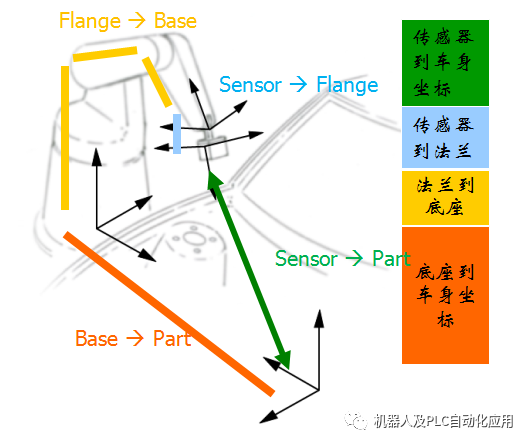
全面的坐標換算方法:
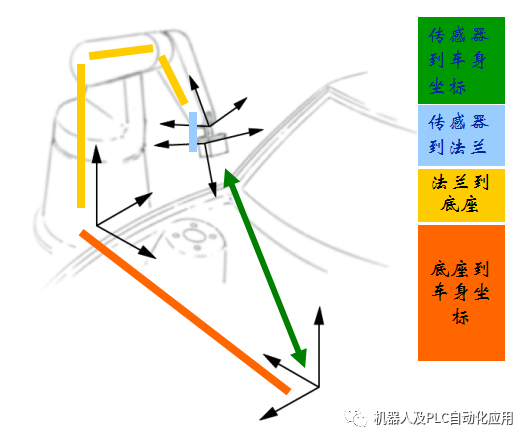
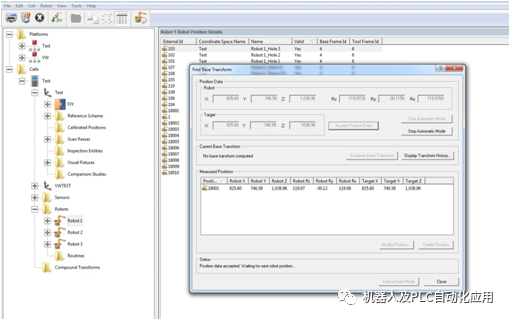
1)Base Finder 讓機器人底座中心與車身坐標關聯(車身原點在該機器人坐標系的坐標值)。
2)設置TCP與傳感器的坐標中心重合(理論)
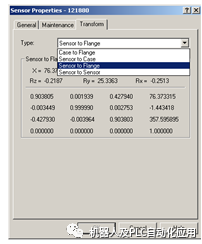
3)Tool Finder消除TCP與傳感器坐標中心的實際誤差(TCP到法蘭盤軸心的坐標值)。
4)通過控制器軟件的計算最終報告測量特征在車身坐標系中的偏差值。
Sensor Space傳感器的工作原理:實際上測頭就是一個精確度很高的工業相機
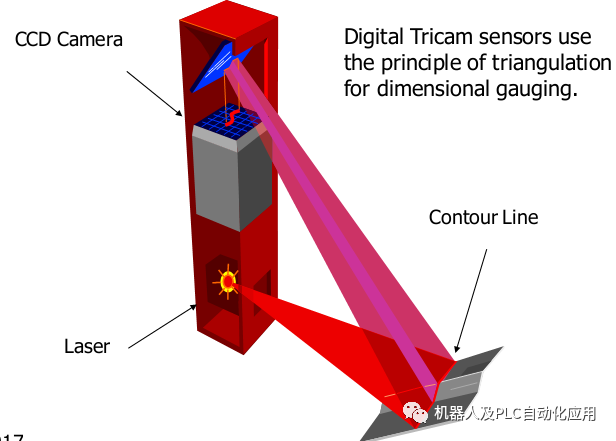
1) 采用三角測量法,每個sensor自身有個坐標系
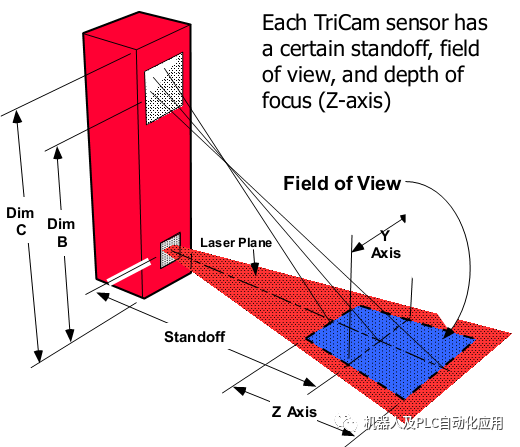
每個TriCam傳感器都有一定的間距,視野和焦深(Z軸)
用于1D和2D測量的數字Tricam輪廓傳感器

數字Tricam傳感器使用三角測量原理進行尺寸測量。
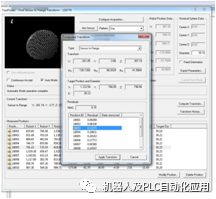
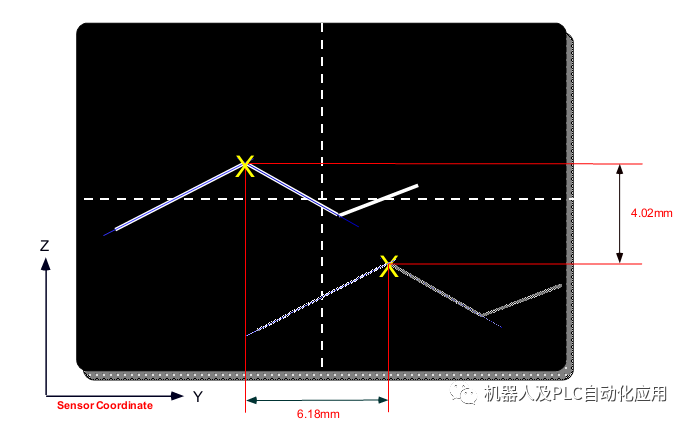
2) C型測頭的圖像通過對圖像的調整來計算測量點的坐標,測量2維測點。
CCD攝像機捕獲反射的激光線的圖像。算法處理圖像以執行尺寸測量。
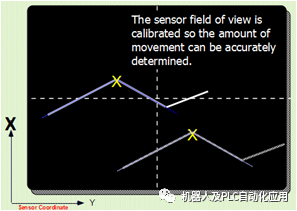
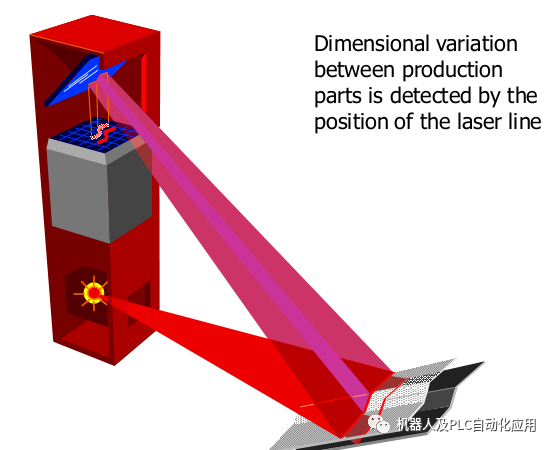
生產零件之間的尺寸變化通過激光線的位置進行檢測
3) S型通過兩拍照對3維測點進行測量,第一次是XY方向,第二次是Z方向。

輔助照明用于執行孔和槽的3D測量
?計量學是Perceptron的核心業務
?專為測量復雜的焊接鈑金組件上的特征而開發的AutoGaugehas> 20種算法
?經過20多年開發和優化的算法
?與三坐標測量機相關性強
3.坐標轉換
車空間
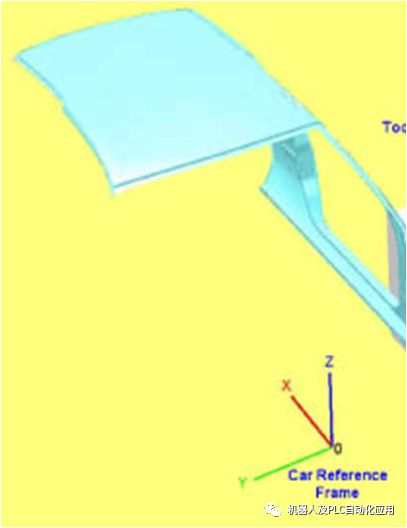
AutoGauge系統要測量的任何零件都將具有自己的坐標系。這稱為零件空間。也稱為零件框架,車身坐標系或汽車參考框架。
傳感器空間
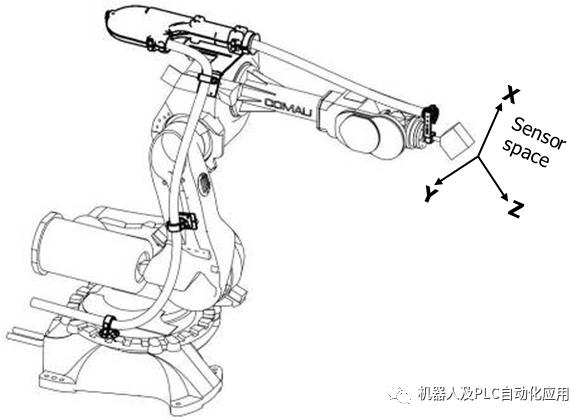
每個傳感器(對于固定系統)或傳感器位置(對于機器人系統)也都有自己的坐標系。這稱為傳感器空間或傳感器框架。
審核編輯 :李倩
-
傳感器
+關注
關注
2576文章
55067瀏覽量
791516 -
測量
+關注
關注
10文章
5638瀏覽量
116747
原文標題:今天說說在美國博塞線測量的原理
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
斯坦福鎖相放大器與塞恩鎖相放大器的選型對比分析

尾塞氣密性檢測儀怎么用-岳信儀器

在線測徑儀|紙管外徑無損精準測量,產線品控高效升級
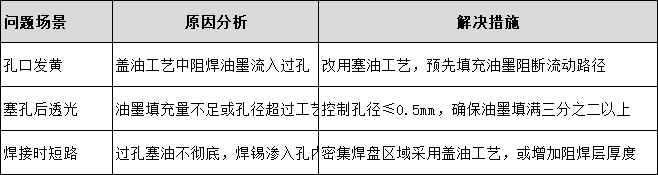
PCB 背鉆塞孔翻車記!綠油凸起竟讓焊接 “手牽手” 短路
激光焊接機在焊接火花塞工藝中的應用

如何選擇適合自己生產線的投影測量設備?3 大關鍵指標

綠油塞孔工藝的缺點有哪些?
多種類幾何尺寸集成智能儀器定制 一站式解決產線多維度測量需求
電阻測量技術的雙生花:兩線法與四線法的科學探秘
如何用TDR阻抗測量儀快速定位PCB傳輸線故障?

PCB板中塞孔和埋孔的區別
多層PCB板過孔塞油工藝要點解析
格陸博科技智能網聯汽車線控制動系統再獲省級權威認可
VirtualLab應用:施密特-卡塞格林望遠鏡
中圖儀器邀您相約2025慕尼黑上海光博會,共探測量科技新未來



 工商網監
工商網監
評論