") 運(yùn)動控制+機(jī)器視覺Demo軟件框架(三)視覺糾偏
運(yùn)動控制+機(jī)器視覺Demo軟件框架(三)視覺糾偏

內(nèi)容回顧
回顧之前課程我們對運(yùn)動控制 +機(jī)器視覺例程Demo的相機(jī)標(biāo)定和形狀匹配兩大模塊進(jìn)行了大致的介紹。目前我們已經(jīng)基本上講完了所有功能模塊。接下本期課程講解一下如何通過該例程進(jìn)行配方編輯實(shí)現(xiàn)視覺糾偏的連續(xù)插補(bǔ)功能的工藝文件,方便大家去理解該例程。
01開發(fā)環(huán)境介紹
一、硬件平臺

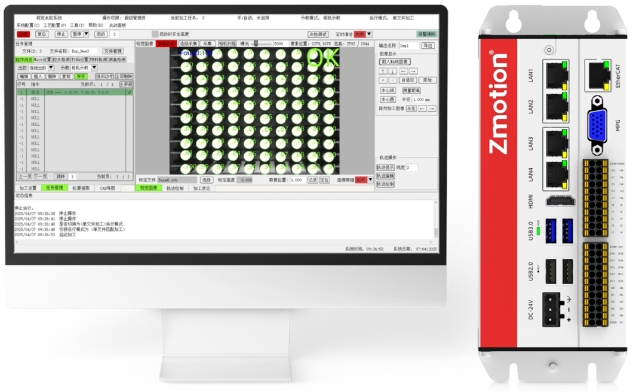
運(yùn)動控制機(jī)器視覺實(shí)訓(xùn)平臺,包括VPLC532視覺控制器、4個步進(jìn)電機(jī)、相機(jī)、光源、光源控制器、帶HDMI接口的工業(yè)顯示屏等相關(guān)硬件配置。
二、軟件平臺
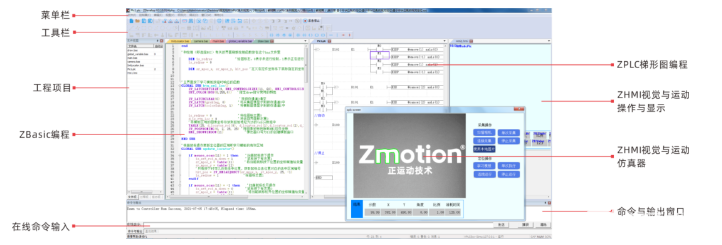
ZDevelop 是正運(yùn)動技術(shù)ZMoiton系列運(yùn)動控制器的PC端程序開發(fā)調(diào)試與診斷軟件,通過它用戶能夠直接對控制器進(jìn)行程序編輯與配置,快速開發(fā)應(yīng)用、實(shí)時診斷系統(tǒng)運(yùn)行參數(shù)以及對運(yùn)動控制。
ZDevelop支持三種編程方式,分別為ZBasic、ZPLC梯形圖、ZHMI組態(tài),使用ZDevelop軟件編寫的程序可以下載到正運(yùn)動控制器里,也可以下載到仿真器在PC平臺仿真運(yùn)行。
02設(shè)置視覺糾偏和連續(xù)插補(bǔ)操作
一、配置系統(tǒng)參數(shù)
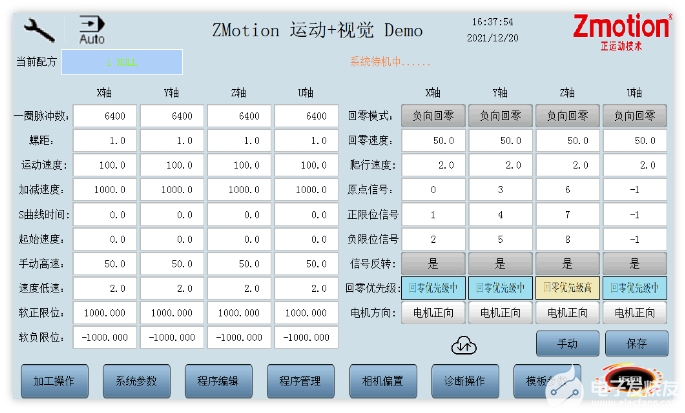
點(diǎn)擊《系統(tǒng)參數(shù)》進(jìn)入系統(tǒng)參數(shù)配置界面,按照機(jī)臺的實(shí)際情況進(jìn)行以上參數(shù)的設(shè)置,然后點(diǎn)擊《保存》即可完成配置。
二、計算相機(jī)中心和加工中心的偏移量

點(diǎn)擊《相機(jī)偏置》進(jìn)入相機(jī)偏置界面。通過手動運(yùn)動先使相機(jī)中心對準(zhǔn)機(jī)臺上的某點(diǎn)如A點(diǎn),然后點(diǎn)擊《記錄相機(jī)中心坐標(biāo)》。
接著繼續(xù)通過手動運(yùn)動使加工中心對準(zhǔn)機(jī)臺是的A點(diǎn),然后點(diǎn)擊《記錄加工中心坐標(biāo)》。
最后點(diǎn)擊《計算偏移量》完成相機(jī)中心和加工中心的偏移量的計算。其中計算出來的偏移量是掉電保存的,其他的坐標(biāo)數(shù)據(jù)沒有保存。
三、相機(jī)標(biāo)定
先在相機(jī)偏置界面點(diǎn)擊《手動》打開手動運(yùn)動窗口,并點(diǎn)擊《開始連續(xù)采集》開啟采集模式,然后手動運(yùn)動使標(biāo)定的Mark點(diǎn)移動的相機(jī)視野的中心位置。
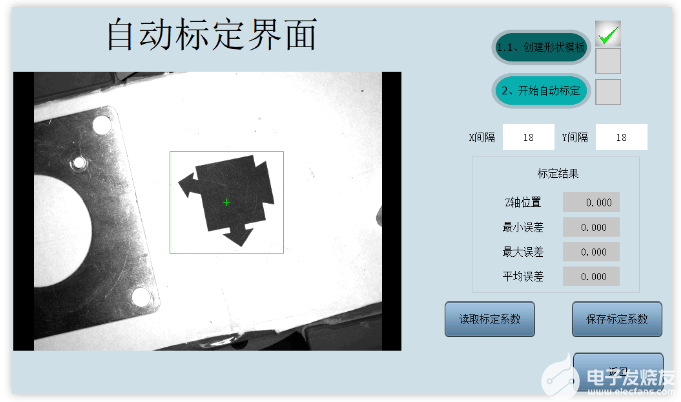
接著點(diǎn)擊《標(biāo)定》進(jìn)入相機(jī)標(biāo)定界面,點(diǎn)擊《1.0、顯示ROI》調(diào)出矩形ROI。然后通過鼠標(biāo)移動ROI將Mark點(diǎn)框選起來,之后點(diǎn)擊《1.1、創(chuàng)建形狀模板》即可完成標(biāo)定模板創(chuàng)建。
最后設(shè)置好X、Y的運(yùn)動間隔后點(diǎn)擊《2、開始標(biāo)定》,等待標(biāo)定OK的窗口彈出 后再點(diǎn)擊《保存標(biāo)定系數(shù)》完成標(biāo)定系數(shù)的保存。
四、打開一個空的程序文件

點(diǎn)擊《程序管理》進(jìn)入程序管理界面,然后選擇空的程序文件,再通過鼠標(biāo)長按紅色框選區(qū)域的按鈕500ms后松開,即可打開該程序文件并自動進(jìn)入程序編輯界面。
五、添加第1行指令--視覺糾偏
第一步
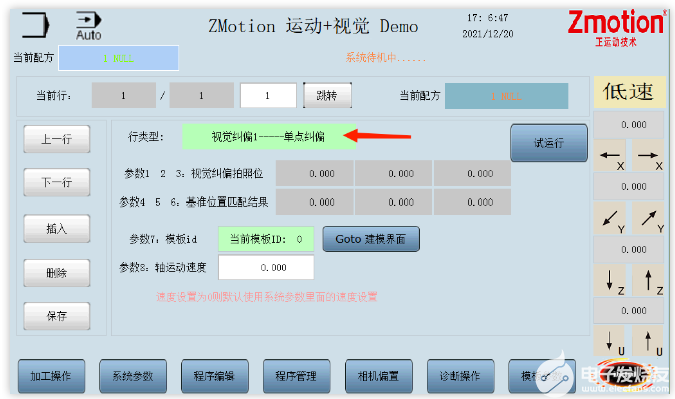
第二步
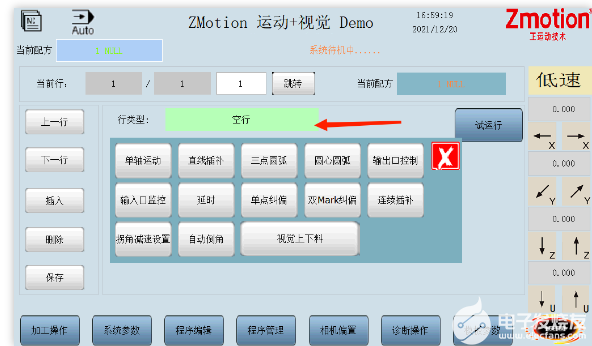
點(diǎn)擊《空行》位置,彈出當(dāng)前行指令選擇窗口,選擇單點(diǎn)糾偏。然后點(diǎn)擊《Goto建模界面》,然后手動運(yùn)動到視覺糾偏拍照位位置,進(jìn)行視覺糾偏模板的創(chuàng)建。
六、添加第2行指令--開啟連續(xù)插補(bǔ)

點(diǎn)擊《下一行》進(jìn)入下一行的編輯,點(diǎn)擊《空行》位置,彈出當(dāng)前行指令選擇窗口,選擇連續(xù)插補(bǔ),并設(shè)置連續(xù)插補(bǔ)功能為ON。
七、添加程序的其它運(yùn)動指令

點(diǎn)擊《下一行》進(jìn)入下一行的編輯,點(diǎn)擊《空行》位置,彈出指令選擇窗口,選擇合適的運(yùn)動指令完成連續(xù)插補(bǔ)軌跡的示教。
八、保存程序文件

完成程序文件的編輯后長按《保存》按鈕 0.5S ,完成程序文件的保存。
九、程序文件的運(yùn)行

返回加工操作界面,進(jìn)行系統(tǒng)的復(fù)位。完成系統(tǒng)復(fù)位后點(diǎn)擊啟動按鈕即可確定該程序文件。
本次,正運(yùn)動技術(shù)運(yùn)動控制+機(jī)器視覺Demo軟件框架(三):視覺糾偏+連續(xù)插補(bǔ)的配方編輯,就分享到這里。
審核編輯:符乾江
-
運(yùn)動控制器
+關(guān)注
關(guān)注
2文章
484瀏覽量
26043 -
運(yùn)動控制卡
+關(guān)注
關(guān)注
7文章
130瀏覽量
16094
發(fā)布評論請先 登錄
機(jī)器視覺鏡頭如何發(fā)現(xiàn)深海沉船

機(jī)器視覺運(yùn)動控制一體機(jī)在電感器骨架涂膠上的應(yīng)用# 正運(yùn)動技術(shù)# 機(jī)器視覺運(yùn)動控制一體機(jī)# 運(yùn)動控制器#
機(jī)器視覺的核心技術(shù)和應(yīng)用場景

正運(yùn)動天地蓋視覺定位貼合界面運(yùn)行視頻# 視覺定位# 機(jī)器視覺運(yùn)動控制一體機(jī)# 正運(yùn)動技術(shù)# 天地蓋定位貼合

正運(yùn)動SCARA機(jī)械手紙盒天地蓋視覺定位貼合# SCARA機(jī)械手# 正運(yùn)動# 紙盒天地蓋# 機(jī)器視覺運(yùn)動控制
機(jī)器視覺運(yùn)動控制一體機(jī)在導(dǎo)熱硅脂涂膠的應(yīng)用# 導(dǎo)熱硅脂# 視覺點(diǎn)膠# 正運(yùn)動技術(shù)# 機(jī)器視覺控制一體機(jī)
機(jī)器視覺檢測PIN針
機(jī)器視覺運(yùn)動控制一體機(jī)在喇叭跟隨點(diǎn)膠上的應(yīng)用#正運(yùn)動技術(shù) #運(yùn)動控制 #機(jī)器視覺 #運(yùn)動控制器 #正運(yùn)動
正運(yùn)動DELTA機(jī)械手多物料視覺分揀解決方案 #正運(yùn)動技術(shù) #運(yùn)動控制 #機(jī)器視覺運(yùn)動控制一體機(jī) #正運(yùn)動
EtherCAT科普系列(8):EtherCAT技術(shù)在機(jī)器視覺領(lǐng)域的應(yīng)用

【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】視覺實(shí)現(xiàn)的基礎(chǔ)算法的應(yīng)用
機(jī)器視覺運(yùn)動控制一體機(jī)在視覺柔性供料場景的應(yīng)用#正運(yùn)動技術(shù) #機(jī)器視覺運(yùn)動控制 #運(yùn)動控制器 #運(yùn)動控制
機(jī)器視覺運(yùn)動控制一體機(jī)在視覺點(diǎn)膠滴藥機(jī)上的應(yīng)用

機(jī)器視覺運(yùn)動控制一體機(jī)在視覺點(diǎn)膠滴藥機(jī)上的應(yīng)用#正運(yùn)動技術(shù) #機(jī)器視覺運(yùn)動控制一體機(jī) #運(yùn)動控制



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論