 ROS中發布激光掃描消息
ROS中發布激光掃描消息

激光雷達工作時會先在當前位置發出激光并接收反射光束,解析得到距離信息,而后激光發射器會轉過一個角度分辨率對應的角度再次重復這個過程。
限于物理及機械方面的限制,激光雷達通常會有一部分“盲區”。使用激光雷達返回的數據通常可以描繪出一幅極坐標圖,極點位于雷達掃描中心,0-360°整周圓由掃描區域及盲區組成。
在掃描區域中激光雷達在每個角度分辨率對應位置解析出的距離值會被依次連接起來,這樣,通過極坐標表示就能非常直觀地看到周圍物體的輪廓,激光雷達掃描范圍示意圖可以參見下圖。
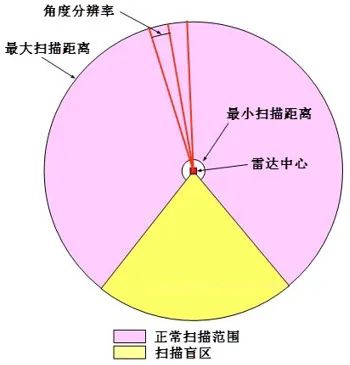
激光雷達通常有四個性能衡量指標:測距分辨率、掃描頻率(有時也用掃描周期)、角度分辨率及可視范圍。
測距分辨率衡量在一個給定的距離下測距的精確程度,通常與距離真實值相差在5-20mm;掃描頻率衡量激光雷達完成一次完整掃描的快慢,通常在10Hz及以上;
角度分辨率直接決定激光雷達一次完整掃描能返回多少個樣本點;可視范圍指激光雷達完整掃描的廣角,可視范圍之外即為盲區。
目前,移動機器人的研究中已經大量使用激光雷達輔助機器人的避障導航。通常激光雷達會提供ROS驅動,如果沒有的話我們也可以自己采集激光數據后按照ROS中定義的消息格式將信息發布出去。
rosmsg show sensor_msgs/LaserScan
LaserScan消息結構如下:
std_msgs/Header headeruint32 seqtime stampstring frame_idfloat32 angle_minfloat32 angle_maxfloat32 angle_incrementfloat32 time_incrementfloat32 scan_timefloat32 range_minfloat32 range_maxfloat32[] rangesfloat32[] intensities
以下圖為例,該激光雷達掃描范圍為270°,角度分辨率為0.25°,掃描距離為0~20m,每掃描一圈會得到1081個點:
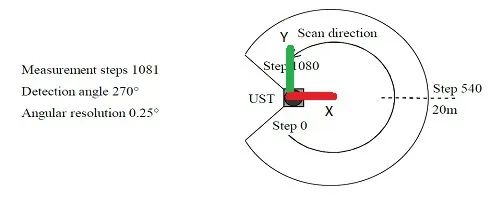
那么該激光雷達發布的LaserScan消息內容如下:
angle_min= -135 * (pi/180); //angle correspond to FIRST beam in scan ( in rad)angle_max= 135 * (pi/180); //angle correspond to LAST beam in scan ( in rad)angle_increment =0.25 * (pi/180); // Angular resolution i.e angle between 2 beams// lets assume sensor gives 50 scans per second. i.e every 20 milli seconds 1 scan with 1081 beams.// Each beam is measured in (20 ms/ 1081 ) ~ = 0.0185 mstime_increment = (1 / 50) / (1081);scan_time = ; // scan is collected at which timerange_min =0 ; // in metersrange_max = 20; // scan can measure upto this range// ranges is array of 1081 floats for each laser beamranges[0] = //distance measure corresponds to angle -135 degranges[1] = //distance measure corresponds to angle -134.75 deg...ranges[1080] = //distance measure corresponds to angle +135 deg// To understand Intensities// if a laser beam hits reflective surface like glass it will have intensity 1.// And if beam hit some surface which absorbs laser , then intensity is zero.// Middle values are different surfaces in between.
下面的代碼模擬了激光雷達的數據,并將sensor_msgs/LaserScan消息發布到/scan話題上:
int main(int argc, char** argv){ros::init(argc, argv, "laser_scan_publisher");ros::NodeHandle n;ros::Publisher scan_pub = n.advertise("scan", 50);unsigned int num_readings = 100;double laser_frequency = 40;double ranges[num_readings];double intensities[num_readings];int count = 0;ros::Rate r(1.0);while(n.ok()){//generate some fake data for our laser scanfor(unsigned int i = 0; i < num_readings; ++i){ranges[i] = count;intensities[i] = 100 + count;}ros::Time scan_time = ros::now();//populate the LaserScan messagesensor_msgs::LaserScan scan;scan.header.stamp = scan_time;scan.header.frame_id = "base_link";scan.angle_min = -1.57;scan.angle_max = 1.57;scan.angle_increment = 3.14 / num_readings;scan.time_increment = (1 / laser_frequency) / (num_readings);scan.range_min = 0.0;scan.range_max = 100.0;scan.ranges.resize(num_readings);scan.intensities.resize(num_readings);for(unsigned int i = 0; i < num_readings; ++i){scan.ranges[i] = ranges[i];scan.intensities[i] = intensities[i];}scan_pub.publish(scan);++count;r.sleep();}}
可以在rviz中將激光數據點顯示出來:Fixed Frame修改為base_link,添加LaserScan并將Topic設為/scan
如果Fixed Frame為map,為了能正確顯示出激光掃描點來,需要發布map和base_link之間的坐標變換關系(因為我們的激光數據是相對于base_link坐標系描述的)。
如果這兩個參考系不發生相對位置變化,那么可以用static_transform_publisher工具發布兩個參考系之間的靜態坐標變換。
命令的格式如下:
static_transform_publisher x y z yaw pitch roll frame_id child_frame_id period_in_msstatic_transform_publisher x y z qx qy qz qw frame_id child_frame_id period_in_ms
以上兩種命令格式,需要設置坐標的偏移和旋轉參數,偏移參數都使用相對于x、y、z三軸的坐標位移。旋轉參數第一種命令格式使用以弧度為單位的 yaw/pitch/roll三個角度,第二種命令格式使用四元數表達旋轉角度。發布頻率以ms為單位,一般100ms比較合適。
static_transform_publisheris designed both as a command-line tool for manual use, as well as for use withinroslaunchfiles for setting static transforms. For example:
"tf" type="static_transform_publisher" name="link1_broadcaster" args="1 0 0 0 0 0 1 link1_parent link1 100" />
ROS中使用激光雷達(鐳神智能)
LS01C是深圳市鐳神智能系統有限公司研發的激光三角測距系統 。
在機械旋轉模塊的帶動下,LS01C 的高頻核心測距模塊將進行順時鐘旋轉,從而實現對周圍環境進行360°掃描測距。LS01C通過uart 串口信號與外部系統通訊,默認每秒采樣3600點、掃描頻率10hz,最大掃描距離6m,角度分辨率為1度。
將LS01C的ROS驅動文件(官網上沒有下載連接,直接打電話給客服要的)解壓重命名為talker后復制到catkin_ws/src下面,然后使用catkin_make進行編譯

插入USB后在終端中輸入以下命令查看USB轉串口設備:
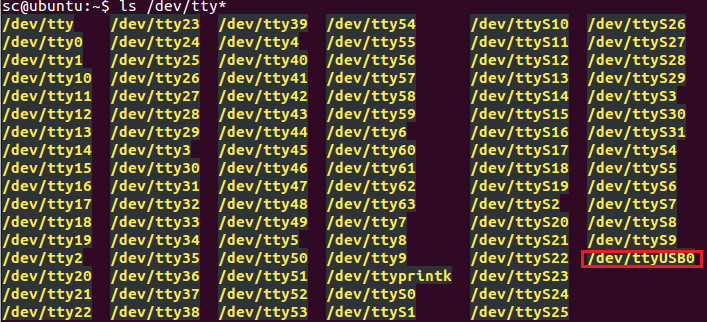
在發現ttyUSB0后在終端中輸入下面命令給USB 轉串口設置權限:
sudo chmod 666 /dev/ttyUSB0
修改launch文件中的串口名,改為我們插入的ttyUSB0
"talker" pkg="talker" type="talker">"scan_topic" value="scan"/>"laser_link" value="laser_link"/>"serial_port" value="/dev/ttyUSB0"/>
然后執行launch文件
roslaunch talker talker.launch
在終端中可以看到talker節點已經開啟:
打開rviz,添加LaserScan并設置topic和參考坐標系,可以動態的顯示激光掃描點:
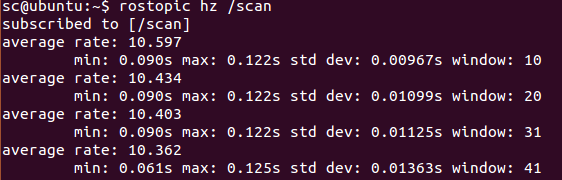
還可以通過 rostopic hz命令查看激光數據發布頻率,可以看出其頻率為10Hz
 ?
?
審核編輯 :李倩
-
激光掃描
+關注
關注
0文章
122瀏覽量
12071 -
激光雷達
+關注
關注
979文章
4470瀏覽量
196543
原文標題:ROS中發布激光掃描消息
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
禾賽科技激光雷達JT64P助力華測導航手持激光掃描儀RS7發布
米爾RK3576成功上車!ROS2 Humble生態系統體驗
SICK激光掃描儀:為工業高精度檢測及測量保駕護航

【CIE全國RISC-V創新應用大賽】+基于MUSE Pi Pro的3d激光里程計實現
如何使用menuconfig添加配置micro-ros軟件包?
掃描、測距新方案亮相,固態激光雷達再進一步
如何基于翼輝信息SylixOS開發ROS 2應用

超酷的樹莓派激光雷達掃描儀!

如何在MQTT中發布和訂閱實體
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
【「# ROS 2智能機器人開發實踐」閱讀體驗】+ROS2應用案例
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
超簡易!線激光3D輪廓掃描方案,解鎖多元應用



 工商網監
工商網監
評論