 簡單的PID控制算法及其改進
簡單的PID控制算法及其改進

不管在電工實際使用,還是電氣科研入門。對于某個系統過程的控制是不可避免的,特別是人工智能興起的今天,電氣作為工科領域的老大哥,也是與時俱進的,現在我們來了解一下幾種簡單傳統的控制算法及其改進。
PID控制算法:
PID控制算法在工業微機中已經應用的比較廣泛,控制結構簡單,參數易于調整,一般是根據經驗進行在線對參數整定。
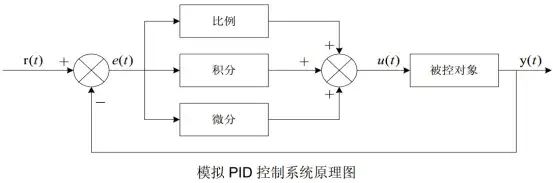
PID控制算法的控制規律:

其中U(t)代表的PID控制的輸出,e(t)代表的輸入信號,Kp代表的是比例系數,Ti代表的是積分控制,Td代表的是微分控制。
如果將它建立成模型控制系統:
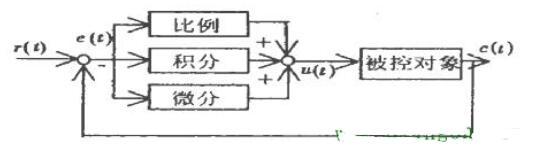
比例環節:即系統的偏差信號e(t)會產生成比例的控制作用來減少偏差。缺點是加大了比列系數會使系統的穩定性變差。
積分環節:積分控制主要是用于消除穩態誤差,提高系統的無差度,但是積分常數越大反而積分作用越弱。缺點是它可能會使系統頻帶變窄。
微分環節:作用是具有預見性,能反應偏差信號的變化率,能提前知道變化趨勢。加快系統響應速度,減少超調,減少調節時間。
以上可以進行三種組合控制即:PI,PD和PID三種。
改進的第一種位置式PID控制:
就是將上面提到的PID控制離散,也就是將一個連續的輸入變成無數個斷點

離散化之后可以對工業情況中某次特殊情況單獨進行分析,只對它偏差值進行點控。
改進的第二種增量式PID算法模型
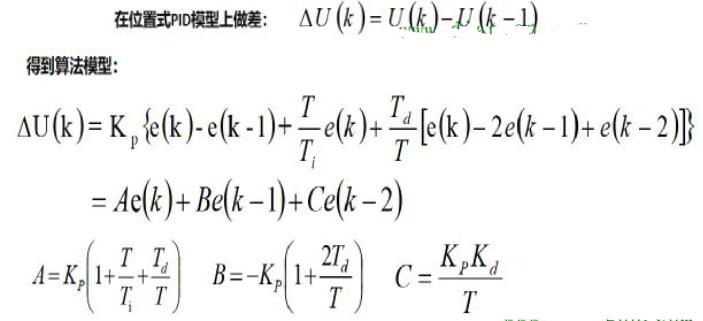
因為位置式PID控制算法中,每次的輸出與控制偏差e過去的整個變化有關,這樣的累加效應會使系統產生較大的累計偏差,讓整個控制系統出現不良的超調現象。其中A,B,C是為了編程更加方便,優點是只需要計算三次采樣周期的偏差值舊的計算出本次周期的控制變量▲U的增量。
以上只是在初次對PID控制算法中的學習心得,希望有助于前沿的前輩們學習掌控,后續也會對其它智能控制算法上的普及,比如遺傳算法和粒子群算法,煙花算法等。
-
算法
+關注
關注
23文章
4784瀏覽量
98088 -
PID控制
+關注
關注
11文章
464瀏覽量
42481
發布評論請先 登錄
變頻器內置PID控制參數的含義

C語言增量式PID的通用算法
CW32L012的PID溫度控制——算法基礎
怎樣理解變頻器內置PID控制參數的含義
PID調參實用方法
明晚!基于RT-Thread 的 PID 控制實踐,從驅動到算法到監控,一次學會!| 問學直播




 工商網監
工商網監
評論