 時間敏感網絡 (TSN):為自動駕駛鋪平道路
時間敏感網絡 (TSN):為自動駕駛鋪平道路

在接下來的幾年里,向自動駕駛(自動駕駛)車輛的過渡將深刻地改變社會。它將重塑我們的物理環境,讓世界恢復數百萬小時的空閑時間并拯救生命。
與人工駕駛車輛相比,自動駕駛車輛的安全性、可靠性和性能標準更高。盡管當今的車輛包含大量處理器、傳感器和其他半導體組件,但對高帶寬切換的需求以及更嚴格的可靠性和同步要求的引入正在推動對車載網絡 (IVN) 的全面重新設計。為了全面滿足這些新要求,現代自動駕駛 IVN 架構正在過渡到 IEEE 時間敏感網絡 (TSN) 標準集。這篇博客文章探討了 TSN 以太網,特別是 IEEE 802.1CB 幀復制和消除 (FRER),如何提高 IVN 冗余和可靠性。
自動駕駛的誕生
盡管自動駕駛實驗可以追溯到 1920 年代,但 DARPA 的“大挑戰”競賽在新千年的第一個十年舉行,并為任何能夠創造出自動駕駛汽車的機器人工程師團隊提供 100 萬美元的獎金。完成專門設計的課程,標志著現代自動駕駛時代的開始。盡管沒有車輛在 2004 年完成莫哈韋沙漠 150 英里的路線,但在隨后的比賽中引入激光雷達技術提供了成功的關鍵,多個團隊在極短的時間內完成了該路線。自動駕駛能力的快速發展讓業界有信心推出自動駕駛汽車的大眾市場應用。
汽車IVN架構
在自動駕駛汽車中,構建“感知”網絡以用各種傳感器(相機、激光雷達、雷達、超聲波等,由圖 1 中的藍色和綠色元素表示)代替人類駕駛員,并與計算綜合體互連(由圖 1 中的紅色元素表示)。

圖 1 - 自動駕駛感知網絡
Compute Complex 接收所有相關的傳感器數據,然后將其融合在一起以決定車輛應該做什么,即轉彎、制動、加速、滑行、信號。然后通過執行網絡發送決策,該網絡通過現有的汽車總線網絡連接到車輛的各種動力傳動系統電子控制單元 (ECU)。
自動駕駛趨勢
自動駕駛IVN設計的主要架構趨勢是:
- 從基于域的架構到基于區域的架構的轉變推動了對高速 IVN 骨干網的需求,以互連區域以太網交換機和計算綜合體。
- 越來越多的連接傳感器、端點、相機和計算元件極大地增加了 IVN 帶寬。
- 采用 4K 和 8K 以太網攝像機轉移到以太網進一步加速了 IVN 帶寬的增長。
- 越來越多的傳感器數據以原始形式在網絡中傳輸,而不是以重新處理的格式,這也增加了 IVN 帶寬。
汽車IVN的演變
有幾種汽車總線技術已被廣泛使用,包括 LIN、Can CAN-FD、FlexRay 和 MOST,但這些技術陳舊、專有、帶寬低且缺乏許多所需功能。
一套基于以太網的強大 IEEE 標準已成為現代自動駕駛感知網絡的主要網絡技術。根據 Kirsten Matheus 博士在 2019 年汽車以太網大會上的講話,該平臺提供了一套完整的解決方案:
- 可擴展的數據速率,從 10Mb/s –100Gb/s
- 拓撲靈活性
- 廣播、多播和點對點流量的共存
- 明確尋址
- 支持多種 QoS 方法
- 強大的安全性
- 基于服務的通信
- 統一網絡(即無網關通信)
時間敏感網絡:現代 IVN 的基礎
在傳統以太網中,有多種網絡冗余解決方案,包括生成樹 (IEEE 802.1D)、快速生成樹 (IEEE 802.1w) 和以太網環保護交換 (ITU G.8032)。然而,這些解決方案受到相當長的故障轉移時間的限制,其范圍從 50 毫秒到幾秒不等。在車輛應用中,這種性能水平是不可接受的。例如,以 60 mph 的速度行駛的汽車每秒行駛 88 英尺,反應延遲為 50 毫秒,對應于 4.4 英尺的行駛距離。這可能是生與死的區別。
自動駕駛是一項關鍵功能,傳統的網絡冗余解決方案不足以滿足安全要求。IEEE 時間敏感網絡 (TSN) 標準正在解決這個問題,該標準為通過確定性以太網網絡對時間敏感的數據傳輸提供了一組機制。這些標準包括:
- IEEE 802.1Qav - 時間敏感流的轉發和排隊增強
- IEEE 802.1Qat - 流預留協議
- IEEE 802.1Qcc - SRP 的增強
- IEEE 802.1Qch - 循環排隊和轉發
- IEEE 802.1Qci - 每流過濾和監管
- IEEE 802.1Qbv - 時間感知調度 (TAS)
- IEEE 802.1Qbu - 幀搶占
- IEEE 802.1Qcr - 異步流量整形
- IEEE 802.1Qca - 路徑控制和預留
- IEEE 802.1CB - 幀復制和消除可靠性
- IEEE 802.1CB – 幀復制和消除以提高可靠性
對自動駕駛平臺特別重要的是幀復制和消除機制,通常稱為無縫冗余 (SR)。該功能可確保在網絡出現單一故障時零丟包,例如節點故障、鏈路故障、鏈路錯誤或因網絡擁塞而丟包。基本操作概念如下:
- 每個數據包都被復制并在兩條不相交的路徑上向目標節點傳輸;
- 重復的數據包具有相同的序列號(SN),編碼在數據包頭中的 SR-Tag 中;
- 在目標節點,目標節點接收到的第一個重復數據包(由 SN 標識)被接受,并且在接收時丟棄重復數據包。
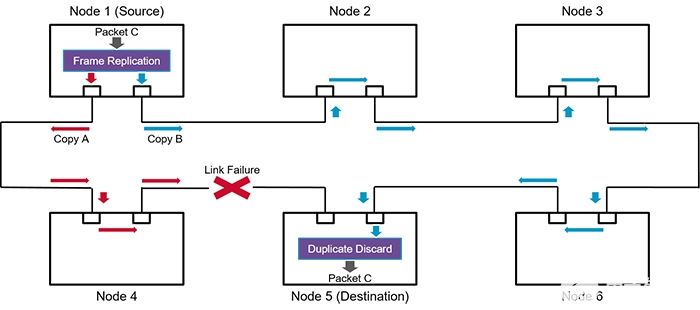
圖 2 - IEEE 802.1CB 零故障轉移時間網絡冗余
如圖 2 所示,通過幀復制和消除,目標節點不會意識到路徑故障,也不會對服務造成影響,無論是丟失數據包的形式,還是由于網絡故障轉移導致的瞬時數據包流中斷。
超越一步
正如引言中所討論的,自動駕駛汽車的標準將高于人類駕駛員。傳統的以太網冗余技術,原本開發的企業組網環境,無法使用;單調駕駛的可靠性要求要求零故障轉移時間解決方案對于車輛的安全運行是必不可少的。支持 IEEE 802.1CB 的 IVN 現在已成為賭注,以確保自動駕駛能夠實現更安全、更高效的交通任務。
Broadcom 將自動駕駛視為以深刻而積極的方式塑造 21 世紀生活的機會,并致力于提供支持技術的關鍵部分。2016 年,Broadcom 推出了世界上第一個 TSN 以太網交換機 Quartz,該交換機現已被設計到全球許多關鍵的汽車自動駕駛設計中。憑借在硬件中實現的關鍵 IEEE 802.1CB 功能,Quartz 可以以高達 25Gb/s 的線路速率運行,從而將 TSN 性能擴展到遠遠超過基于軟件或 FPGA 的解決方案。2020 年,Broadcom 進一步擴展了其 TSN 創新,推出了 Quartz 系列的下一個成員——Quartz2。這款新設備增加了對 100 Gb/s 的支持,包括一個集中的線速 MACsec 加密/解密引擎,并顯著降低了功耗。這些新的創新解決了汽車自動駕駛市場的關鍵要求。下表總結了 Quartz 和 Quartz2 的特性集:
| 設備 | 100M | 1G | 2.5G | 10G | 25G | 100克 | 802.1CB | MACSec |
|---|---|---|---|---|---|---|---|---|
| 石英 |
? |
? |
? |
? |
? |
?(硬件) |
||
| 石英2 |
? |
? |
? |
? |
? |
? |
?(硬件) |
?(硬件) |
表:Broadcom 用于汽車應用的 TSN 以太網交換機匯總
審核編輯:符乾江
-
智能汽車
+關注
關注
30文章
3288瀏覽量
109525 -
自動駕駛
+關注
關注
793文章
14884瀏覽量
179912 -
TSN
+關注
關注
3文章
294瀏覽量
17989
發布評論請先 登錄
自動駕駛中常提的占用網絡檢測存在哪些問題?
2026年自動駕駛汽車發展趨勢前瞻

自動駕駛BEV Camera數據采集系統:高精度時間同步解決方案

【新品速遞】面向時間敏感網絡的模塊化測試利器——TSN CoreSolution 4.0

AS三部曲之二 | TSN同步運行機制:多級設備同步如何避免誤差累積?

邊聊安全 | 以L3級自動駕駛為例,詳解DDT、DDT Fallback、MRC、MRM概念

虹科干貨 | 拆解TSN四大支柱:從「盡力而為」到工業實踐的確定性網絡
如何確保自動駕駛汽車感知的準確性?

自動駕駛汽車如何正確進行道路識別?

卡車、礦車的自動駕駛和乘用車的自動駕駛在技術要求上有何不同?

TSN(時間敏感網絡)是什么
自動駕駛安全基石:ODD
《汽車駕駛自動化分級》會更適合中國自動駕駛發展嗎?




 工商網監
工商網監
評論