") 機器人多軸控制同步性挑戰(zhàn)如何解決?
機器人多軸控制同步性挑戰(zhàn)如何解決?

目前工業(yè)機器人的發(fā)展趨勢一是協(xié)作,二是多軸。所謂機器人的多軸驅(qū)控,即機器人在運行時需要準確地把控每一個軸的移動。多軸機器人意味著有更多的自由度,完成幾乎任何角度和軌跡的運動作業(yè)。6軸機器人是目前工業(yè)機器人應用里最為普遍的,如果應用場景需要工業(yè)機器人能夠躲避特定的目標,那么就會再多出一個軸,一般稱這種軸為冗余軸。
在機器人的每一個軸中,伺服驅(qū)動和電機肯定是少不了的。每個軸通過工業(yè)以太網(wǎng)互聯(lián),控制系統(tǒng)要將運動需要的空間軌跡轉(zhuǎn)換為每個伺服軸所需的單個位置基準,然后循環(huán)傳輸給每個機器軸。這些步驟一般會按照底層伺服電機驅(qū)動的PWM時間周期來進行。在每一個時間周期內(nèi),或者說控制周期內(nèi),位置的發(fā)送就會涉及軸到軸的網(wǎng)絡傳輸。
(圖源:ADI)
此時挑戰(zhàn)出現(xiàn)了,運動數(shù)據(jù)的傳輸延遲幾乎決定了工業(yè)機器人的同步性,傳輸?shù)难舆t成了影響機器人多軸協(xié)同的重要參數(shù)。
在我們此前討論工業(yè)機器人連接器的文章中,可以看到目前應用于工業(yè)機器人的高性能連接線纜對信號傳輸?shù)哪芰σ呀?jīng)足夠強,因此在這個挑戰(zhàn)中我們可以忽略連接線纜帶來的延遲,那么剩下的就是數(shù)據(jù)傳輸?shù)骄€路延遲。這些延遲主要集中帶寬以及PHY上。多軸機器人系統(tǒng)內(nèi)節(jié)點越多,此類延遲將不可避免地變大。
提高帶寬還是降低PHY延遲?
通過低延遲PHY縮短網(wǎng)絡周期時間是最為直接的應對此挑戰(zhàn)的方法,盡可能在物理層設備上縮短PHY的延遲將大幅縮短網(wǎng)絡周期時間(控制器收集和更新所連器件的數(shù)據(jù)所需的時間)。這種方法會改善網(wǎng)絡更新時間,對于多軸機器人這種需要對控制周期時間嚴格把控的應用這一點至關重要,這意味著每個周期網(wǎng)絡內(nèi)可以將更多器件連接到網(wǎng)絡。這不是說帶寬延遲并不重要,而是在帶寬已經(jīng)滿足數(shù)據(jù)吞吐量的情況下,一味拔高帶寬會適得其反。
以ADI在多軸機器人上應用最多的PHY ADIN1300作為收發(fā)器,假設接收緩沖器分析是以目標地址為基礎,且采用100 Mbps網(wǎng)絡,1000BASE-T RGMI延遲發(fā)射
(圖源:ADI)
當然也可以使用1 Gbps的傳輸網(wǎng)絡,但帶寬的增加雖然能很明顯地減少低帶寬延遲帶來的影響,但這不可避免地會增加開關和PHY組件導致的總體延遲的比例,導致留給下一周期更新電機控制和移動控制算法計算的時間反而會減少。確保帶寬肯定是必要的,只不過帶寬足夠情況下降低PHY延遲是更能提升多軸系統(tǒng)同步性的辦法。
這類低延遲的以太網(wǎng)PHY往往集成相關的通用模擬電路、輸入和輸出時鐘緩沖、管理接口和子系統(tǒng)寄存器以及MAC接口和控制邏輯,以便管理復位和時鐘控制以及引腳配置。MII管理接口最好能在主機處理器和PHY器件之間提供雙線式串行接口,以便訪問PHY內(nèi)核管理寄存器中的控制和狀態(tài)信息。一般來說PHY器件對電纜的支持會遠超多軸機器人對線纜的需求,就不必擔心此類問題了。
抗擾度成攔路虎
多軸機器人的工作環(huán)境雖然稱不上惡劣,但很多應用中場景要求都足夠嚴苛。PHY器件要么會直接連接至電纜,要么會通過小型磁性元件連接至電纜,這些連接可能帶來輻射和傳導干擾,嚴重影響傳輸延遲,所以PHY器件必須在抗擾度上跨過難關。IEC 61000-4-2等EMC標準都可以作為衡量PHY的標準。
目前較為領先的是PHY提供通過帶有非屏蔽/屏蔽功能的單雙絞線傳輸和接收數(shù)據(jù)所需的所有物理層功能。
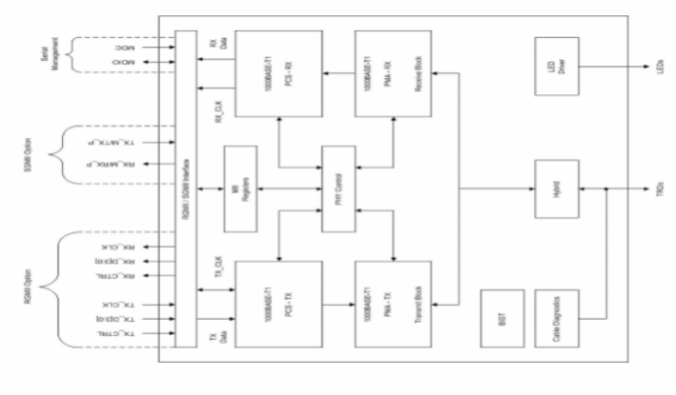
(圖源:TI)
優(yōu)化抗擾度意味著要有大量的實時監(jiān)控、調(diào)試和器件測試。集成靜電放電(ESD)監(jiān)測肯定是少不了的,任何ESD保護都離不開這個功能,它能夠計算xMII和MDI上的ESD事件,并通過使用可編程中斷提供實時監(jiān)控。此外,為了提升整體系統(tǒng)的低延遲下高穩(wěn)定性,各類保護功能都會被集成進芯片中。有的芯片廠商還給出了集成了一個數(shù)據(jù)生成器的辦法,用于生成可定制的MAC數(shù)據(jù)包,并檢查傳入數(shù)據(jù)包上的錯誤,這使得系統(tǒng)級數(shù)據(jù)路徑測試/優(yōu)化不依賴于MAC,大大提升了系統(tǒng)的可靠性。不能提供穩(wěn)定的低延遲那么多軸機器人的同步性就大打折扣。
PHY損耗同樣不可忽視
多軸機器人所需的器件通常采用IP65/IP66等級的保護,高溫也是工業(yè)設備都要面對的問題。不僅如此,多個以太網(wǎng)連接也會使得數(shù)據(jù)輸入和輸出相關的PHY損耗翻倍。所以降低PHY損耗以此來降低器件的自發(fā)熱也是應對多軸機器人控制不能忽視的一點。
-
機器人
+關注
關注
213文章
31079瀏覽量
222277 -
PWM
+關注
關注
116文章
5872瀏覽量
225669 -
PHY
+關注
關注
2文章
335瀏覽量
54086
發(fā)布評論請先 登錄
人形機器人開發(fā)觀察:如何搞定全身40+關節(jié)的亞毫秒級同步控制?

機器人內(nèi)部零配件的生產(chǎn)加工廠從哪找?
六軸工業(yè)機器人控制解決方案:基于ARMxy BL350系列的邊緣智能控制平臺
高精度機器人控制的核心——基于 MYD-LT536 開發(fā)板的精密運動控制方案
中國科學院研發(fā)3D手型微納機器人
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
工業(yè)機器人的特點
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產(chǎn)品

借助NVIDIA技術實現(xiàn)機器人裝配和接觸密集型操作
運動控制軸和單軸控制區(qū)別怎么選?工業(yè)自動化工程師一文講透!

絕對位置感知的機器人多關節(jié)模組高精度運動學解算與動態(tài)誤差補償



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論