") 一文詳細(xì)了解車載攝像頭
一文詳細(xì)了解車載攝像頭

當(dāng)前車輛上攝像頭的使用是很普遍的,例如普通的倒車影像、自動駕駛、DMS等,下面就來對其進(jìn)行梳理一下。
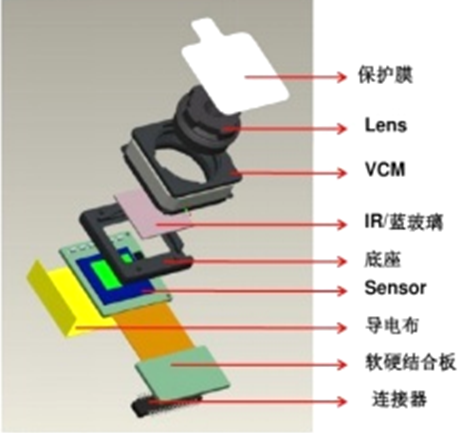
01.攝像頭結(jié)構(gòu)
攝像頭一般由鏡頭(Lens),圖像傳感器(Image Sensor),圖像信號處理器(Image SignalProcessor, ISP),串行器發(fā)送(Serializer)組成 ,如下圖所示數(shù)據(jù)的傳輸步驟為鏡頭采集到物體的基本信息然后由Image Sensor進(jìn)行一定處理后再交于ISP處理之后串行化傳輸。傳輸方式同樣可分為在同軸電纜或雙絞線上基于LVDS傳輸或者直接通過以太網(wǎng)傳輸。

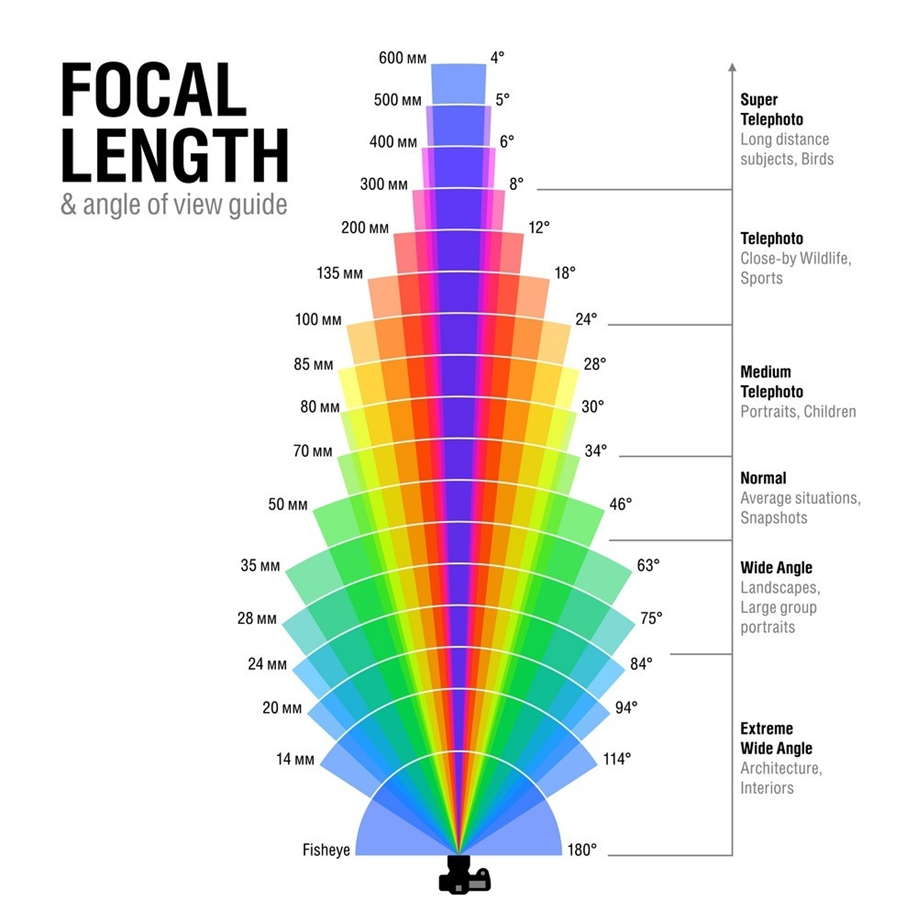
02.視角的影響
對車載攝像頭而言,當(dāng)前的技術(shù)發(fā)展對顏色,分辨率和幀率基本能滿足自動駕駛軟件的需求。例如AP2.5采用1080P(約2Mpixel),30fps,作為對比,小米10攝像頭采用108M pixel,60fps的攝像頭.對于布置來說,主要是視角對感知范圍的影響。在攝像頭感光元件大小確定的情況下,焦距越長,對應(yīng)的視角越窄。但對應(yīng)的分辨率也能大大提高——即看的清,但看的東西少。
對于自動駕駛而言,不僅需要關(guān)注遠(yuǎn)方的路標(biāo),紅綠燈,指示牌,車輛等信息做路線規(guī)劃和預(yù)控判斷,還需要觀察距離比較近的是否有行人,岔道口是否有車輛駛?cè)牒褪占囕v旁邊的插隊車輛,行人,自行車等信息進(jìn)行風(fēng)險預(yù)控等。當(dāng)前單一攝像頭是無法做到全視野的信息采集。因此L2級別以上基本會配置中程及長程攝像頭。高檔車輛會采用3前視攝像頭的配置。
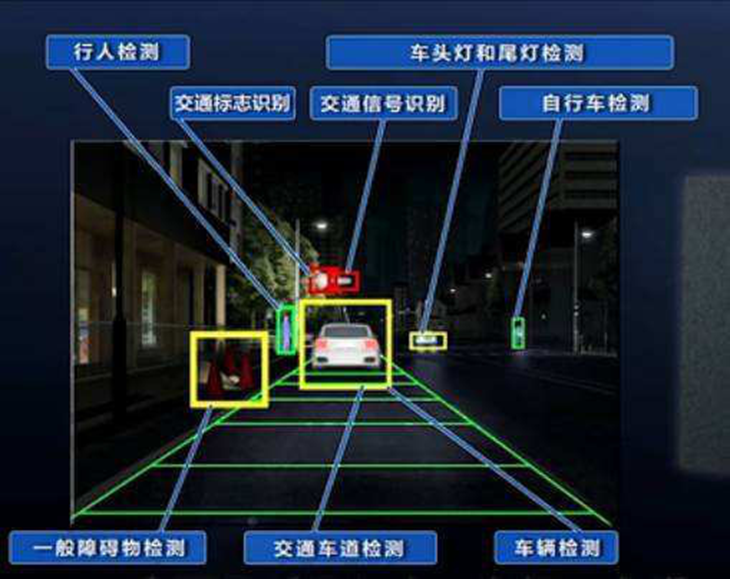
03.視覺傳感器在自動駕駛系統(tǒng)中的主要作用
障礙物探測:使用雙目或者三目測速和測距車道線的檢測:車道線提取道路信息讀取:交通信號燈識別,交通標(biāo)志識別地圖構(gòu)建與輔助定位其他交通參與者探測與識別 - 車輛探測、行人探測、動物探測
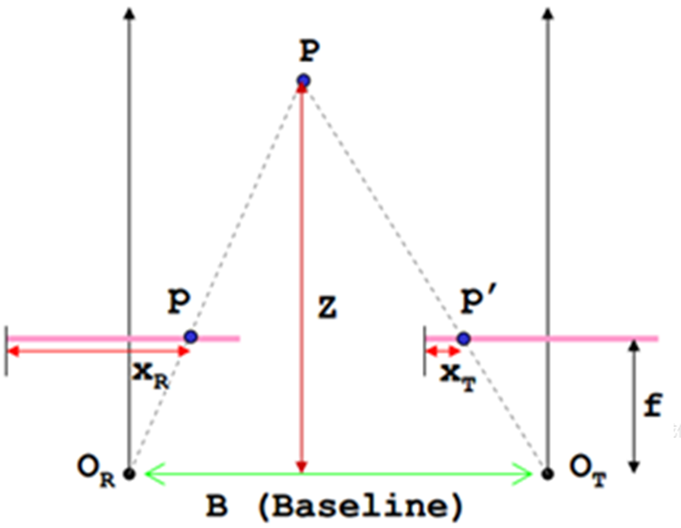
04.單目攝像頭與雙目攝像頭測距原理對比
單目攝像頭測距原理是先匹配識別后估算距離:通過圖像匹配識別出目標(biāo)類別,預(yù)估目標(biāo)尺寸,隨后根據(jù)圖像大小估算距離。單目系統(tǒng)的優(yōu)勢在于成本較低,對計算資源的要求不高,系統(tǒng)結(jié)構(gòu)相對簡單;缺點是:(1)需要不斷更新和維護(hù)一個龐大的樣本數(shù)據(jù)庫,才能保證系統(tǒng)達(dá)到較高的識別率;(2)無法對非標(biāo)準(zhǔn)障礙物進(jìn)行判斷;(3)距離并非真正意義上的測量,準(zhǔn)確度較低。當(dāng)前業(yè)內(nèi)量產(chǎn)做到最好誤差在10-15%左右。
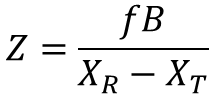
雙目攝像頭測距原理是雙目三角測距的原理,對目標(biāo)物體距離感知是一種絕對的測量,而非估算,原理如下圖所示。
雙目系統(tǒng)優(yōu)勢:
1)成本比單目系統(tǒng)要高,但比激光雷達(dá)等方案相比成本較低;
2)原理上無需先進(jìn)行識別再進(jìn)行測算,而是對所有障礙物直接進(jìn)行測量;
3)無需維護(hù)樣本數(shù)據(jù)庫。
雙目系統(tǒng)的缺點:1)計算復(fù)雜度大,大規(guī)模商用難度高;2)對環(huán)境光照非常敏感,對算法提出很大的挑戰(zhàn);3)不適用于單調(diào)缺乏紋理的場景。對于與背景色接近的場景(天空、白墻、沙漠等)可能無法識別;4)相機基線限制了測量范圍,同時安裝的精度和光心的尺寸偏差對測量結(jié)果影響很大,耐久一致性較難保證。
05.攝像頭數(shù)據(jù)傳輸
已量產(chǎn)的車型中攝像頭數(shù)據(jù)處理分為兩類,一種在攝像頭處集成控制器進(jìn)行特征提取和輸出典型應(yīng)用是Mobileye的EyeQ系列。如EyeQ4設(shè)計預(yù)留可同時處理8路攝像頭數(shù)據(jù),原始數(shù)據(jù)在EyeQ4中處理,可以提取車道線數(shù)據(jù),10個行人和車輛目標(biāo)信息,交通標(biāo)識,自身車身姿態(tài),測距信息(單目算法)。數(shù)據(jù)最后通過CAN-FD發(fā)送到中央處理器。另外一種是攝像頭輸出原始數(shù)據(jù)典型應(yīng)用有TeslaHW2.5。HW2.5采用雙NvidiaParker SoC加GP106顯卡的計算單元,能處理12路攝像頭數(shù)據(jù)。攝像頭與視覺處理器之間的數(shù)據(jù)傳輸一般有兩種選擇:串行接口和以太網(wǎng)。當(dāng)前普遍采用串行接口。攝像頭數(shù)據(jù)的串行傳輸物理層采用LVDS(Low Voltage Differential Signal)的接口。具有高速率(Gbps級)、低延遲、低功耗的特點。協(xié)議層主要解決方案為TI的FPD-Link、Maxim的GMSL等。目前市場上的傳輸協(xié)議具有專一性,不同供應(yīng)商的產(chǎn)品無法通用。一般由控制器平臺決定選擇何種協(xié)議層。如HW2.5采用Nvidia方案所以選擇的是GMSL協(xié)議,而在HW3.0上FSD則選擇了TI的解決方案。LVDS傳輸?shù)脑恚和ㄟ^精準(zhǔn)的線束阻抗匹配,以小電流的形式得到差分電壓獲得超高速的傳輸速率。(>1.8Gbps@15m,3G@10m)采用同軸電纜可有效地避免車規(guī)級EMC風(fēng)險,同時降低成本。數(shù)據(jù)傳輸采用點對點雙向通訊。每個攝像頭需配置獨立解碼芯片,控制器端在每個攝像頭通道的接收端也需配置獨立的解碼芯片。
原文標(biāo)題:一文了解車載攝像頭
文章出處:【微信公眾號:硬件攻城獅】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
審核編輯:湯梓紅
-
傳感器
+關(guān)注
關(guān)注
2576文章
55041瀏覽量
791339 -
以太網(wǎng)
+關(guān)注
關(guān)注
41文章
5998瀏覽量
180848 -
攝像頭
+關(guān)注
關(guān)注
61文章
5091瀏覽量
103122
原文標(biāo)題:一文了解車載攝像頭
文章出處:【微信號:mcu168,微信公眾號:硬件攻城獅】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
自動駕駛汽車如何依靠攝像頭判斷距離?

什么是汽車車載攝像頭氣密性檢測儀-岳信儀器

車內(nèi)安防 + 車外識別,車載 IPC 攝像頭成為出行安全守護(hù)者

電池模擬器為車載攝像頭量產(chǎn)測試植入“精準(zhǔn)電力標(biāo)尺”
激光焊接技術(shù)在焊接車載攝像頭工藝中的應(yīng)用

車載雙目攝像頭如何“看見”世界?

車載攝像頭氣密性檢測儀操作常見問題及解決辦法-岳信儀器

保隆科技COB封裝攝像頭通過AEC-Q認(rèn)證
車載攝像頭產(chǎn)線“智”造升級!RFID解鎖效率與質(zhì)量“雙引擎”
激光振鏡掃描錫焊技術(shù)在車載攝像頭模組中的應(yīng)用

創(chuàng)世SD NAND貼片卡:智能攝像頭存儲難題的完美解決方案 #人工智能 #智能攝像頭 #攝像頭
紅外攝像頭模組是什么?科技時代的眼睛

一文聊聊自動駕駛攝像頭

社區(qū)安裝IPC攝像頭,跟安裝一般安防監(jiān)控攝像頭有什么區(qū)別?

愛普生車規(guī)晶振SG2016CAA在車載攝像頭的應(yīng)用




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論