") 自適應(yīng)總線電壓和開關(guān)頻率控制
自適應(yīng)總線電壓和開關(guān)頻率控制

由于效率要求的不斷增長(zhǎng),許多電源制造廠商開始將注意力轉(zhuǎn)向無(wú)橋功率因數(shù)校正 (PFC) 拓?fù)浣Y(jié)構(gòu)。一般而言,無(wú)橋接 PFC可以通過減少線路電流通路中的半導(dǎo)體組件數(shù)目來(lái)降低傳導(dǎo)損耗。盡管無(wú)橋接 PFC 的概念已經(jīng)提出了許多年,但因其實(shí)施的難度和控制的復(fù)雜程度,阻礙了其成為一種主流。
一些專為電源而設(shè)計(jì)的低成本、高性能數(shù)字控制器上市以后,越來(lái)越多的電源公司開始為 PFC 設(shè)計(jì)選擇使用這些新型數(shù)字控制器。相比傳統(tǒng)的模擬控制器,數(shù)字控制器擁有許多優(yōu)勢(shì),例如:可編程配置、非線性控制、低組件數(shù)目,以及最為重要的復(fù)雜功能實(shí)施能力(模擬方法通常較難實(shí)現(xiàn))。
大多數(shù)現(xiàn)今的數(shù)字電源控制器,例如:TI 的融合數(shù)字電源 (Fusion Digital PowerTM) 控制器 UCD30xx 等都有許多集成電源控制外設(shè)和一個(gè)電源管理內(nèi)核,例如:數(shù)字環(huán)路補(bǔ)償器、快速模數(shù)轉(zhuǎn)換器 (ADC)、內(nèi)置停滯時(shí)間的高分辨率數(shù)字脈寬調(diào)制器 (DPWM)、低功耗微控制器等。它們是如無(wú)橋接 PFC 等復(fù)雜高性能電源設(shè)計(jì)的較好選擇。
數(shù)字控制無(wú)橋接 PFC
在其他一些無(wú)橋接 PFC 拓?fù)浣Y(jié)構(gòu)中[1] [2],圖 1 是一個(gè)已經(jīng)為業(yè)界所廣泛采用的無(wú)橋接 PFC 實(shí)例。它具有兩個(gè) DC/DC 升壓電路[3] [4],一個(gè)由 L1、D1 和S1 組成,而另一個(gè)則由 L2、D2 和 S2 組成。D3 和 D4 為慢速恢復(fù)二極管。通過參考內(nèi)部電源接地單獨(dú)檢測(cè)線壓和中性點(diǎn)電壓,測(cè)量得到輸入 AC 電壓。通過對(duì)比檢測(cè)線壓信號(hào)和中性點(diǎn)信號(hào),固件便知道其為一個(gè)正半周期,還是一個(gè)負(fù)半周期。在一個(gè)正半周期期間,第一個(gè) DC/DC 升壓電路即 L1-S1-D1 有效,同時(shí)升壓電流回到二極管 D4 的 AC 中性點(diǎn)。在一個(gè)負(fù)半周期期間,第二個(gè) DC/DC 升壓電路即 L2-S2-D2 有效,同時(shí)升壓電流回到二極管 D3 的 AC 線。像 UCD3020 這樣的數(shù)字控制器用于控制這種無(wú)橋接 PFC。
無(wú)橋接 PFC 基本都由兩個(gè)相升壓電路組成,但在任何時(shí)候都只有一個(gè)相有效。對(duì)比使用相同功率器件的傳統(tǒng)單相 PFC,無(wú)橋接 PFC 和單相 PFC 的開關(guān)損耗應(yīng)該是一樣的。但是,無(wú)橋接 PFC 電流在任何時(shí)候都只通過一個(gè)慢速二極管(正半周期為 D4,負(fù)半周期為 D3),而非兩個(gè)。因此,效率提高的多少取決于一個(gè)二極管和兩個(gè)二極管之間的傳導(dǎo)損耗差異。另外,通過完全開啟關(guān)閉的開關(guān)可以進(jìn)一步提高無(wú)橋接 PFC 效率。例如,在一個(gè)正周期期間,S1 通過 PWM 信號(hào)控制,而 S2 則可以完全開啟。當(dāng)流動(dòng)的電流低于某個(gè)值時(shí),MOSFET S2 的壓降可能會(huì)低于二極管 D4,因此返回電流部分或者全部流經(jīng) L1-D1-RL-S2-L2,然后返回 AC 源。傳導(dǎo)損耗可以降低,電路效率也可以得到提高,特別是在輕負(fù)載的情況下。同樣,在一個(gè)負(fù)周期期間,S2 開關(guān)時(shí),S1 被完全開啟。圖 2 顯示了 S1 和 S2 的控制波形。
自適應(yīng)總線電壓和開關(guān)頻率控制
傳統(tǒng)上,效率指的是滿負(fù)載狀態(tài)下高線壓和低線壓的效率。現(xiàn)在,如計(jì)算服務(wù)器和遠(yuǎn)距離通信電源等大多數(shù)應(yīng)用,除滿負(fù)載狀態(tài)效率以外,還要求 10%-50% 負(fù)載范圍狀態(tài)的效率也必須滿足標(biāo)準(zhǔn)規(guī)范。大多數(shù) AC/DC 應(yīng)用中,系統(tǒng)有 PFC 和下游DC/DC 級(jí),因此我們根據(jù)整個(gè)系統(tǒng)來(lái)測(cè)量效率。若想提高輕負(fù)載狀態(tài)下的總系統(tǒng)效率,一種方法是降低 PFC 輸出電壓和開關(guān)頻率。這要求了解負(fù)載信息,而這項(xiàng)工作通常是通過使用一些額外電路測(cè)量輸出電流來(lái)實(shí)現(xiàn)的。但是,利用數(shù)字控制器,便不再需要這些額外電路。輸入 AC 電壓和 DC 輸出電壓相同時(shí),輸出電流與電壓環(huán)路輸出成正比。因此,如果我們知道電壓環(huán)路的輸出,我們便可以相應(yīng)地調(diào)節(jié)頻率和輸出電壓。使用數(shù)字控制器以后,電壓環(huán)路通過固件來(lái)實(shí)現(xiàn),其輸出已知,所以實(shí)現(xiàn)這種特性便十分容易,并且成本比使用模擬方法要低得多。
通過變流器實(shí)現(xiàn)電流檢測(cè)
無(wú)橋接 PFC 的難題之一是如何檢測(cè)整流后的 AC 電流。如前所述,AC 返回電流(部分或者全部)可能會(huì)流經(jīng)處于非活動(dòng)狀態(tài)的開關(guān),而非慢速二極管 D3/D4。因此,在接地通路中使用一個(gè)分路器來(lái)檢測(cè)電流(通常在傳統(tǒng) PFC 中使用),已不再適用。取而代之的是,使用一個(gè)變流器 (CT),每相一個(gè)(圖 1)。這兩個(gè)變流器的輸出被整流,然后組合在一起,產(chǎn)生電流反饋信號(hào)。由于在任何時(shí)候都只有一個(gè)變流器整流輸出信號(hào),即使在其組合時(shí)也是如此,因此任何時(shí)候都只有一個(gè)反饋電流信號(hào)。
如圖 3-4 所示,由于變流器放置在開關(guān)的右上方,因此其只檢測(cè)開關(guān)電流(只是電感電流的上升部分)。數(shù)字控制實(shí)施時(shí),在時(shí)間 Ta 的 PWM 中間測(cè)量該開關(guān)電流信號(hào)。它是一個(gè)瞬時(shí)值,在圖 3-4 中以 Isense 表示。僅當(dāng)該電流為連續(xù)電流時(shí),測(cè)得開關(guān)電流 Isense 才等于平均 PFC 電感電流(請(qǐng)參見圖 3)。該電流變?yōu)槿鐖D 4 所示非連續(xù)電流時(shí),Isense 不再等于平均 PFC 電感電流。為了計(jì)算電感平均電流,應(yīng)該建立某個(gè)開關(guān)時(shí)間期間中間點(diǎn)檢測(cè)電流 Isense 和平均電感電流之間的關(guān)系,并且這種關(guān)系應(yīng)該同時(shí)適用于連續(xù)導(dǎo)通模式 (CCM) 和非連續(xù)導(dǎo)通模式 (DCM)。
就一個(gè)穩(wěn)態(tài)運(yùn)行的升壓型轉(zhuǎn)換器而言,升壓電感的第二電壓應(yīng)在所有開關(guān)期間都保持平衡:
其中,Ta 為電流上升時(shí)間(PWM 導(dǎo)通時(shí)間),Tb 為電流下降時(shí)間(PWM 關(guān)閉時(shí)間),VIN 為輸入電壓,而 VO 為輸出電壓,并假設(shè)所有電源器件均為理想狀態(tài)。
由圖 3-4,我們可以通過 Isense 計(jì)算出電感平均電流 Iave:
其中,T 為開關(guān)時(shí)間。
將(1)和(2)組合,我們得到:
通過方程式 3,平均電感電流 Iave 表示為瞬時(shí)開關(guān)電流 Isense。理想電流 Iave 和 Isense 為電流控制環(huán)路的電流基準(zhǔn)。檢測(cè)到現(xiàn)實(shí)瞬時(shí)開關(guān)電流后,將其與該基準(zhǔn)對(duì)比,誤差被發(fā)送至一個(gè)快速誤差 ADC (EADC),最終將數(shù)字化的誤差信號(hào)發(fā)送至一個(gè)數(shù)字補(bǔ)償器,以關(guān)閉電流控制環(huán)路。
動(dòng)態(tài)調(diào)節(jié)環(huán)路補(bǔ)償器
總諧波失真 (THD) 和功率因數(shù) (PF) 是兩個(gè)判定 PFC 性能非常重要的標(biāo)準(zhǔn)。一個(gè)好的環(huán)路補(bǔ)償器應(yīng)該具有較好的 THD 和 PF。但是,PFC 的輸入范圍如此之寬,其可以從 80 Vac 擴(kuò)展至高達(dá) 265 Vac。低線壓狀態(tài)下?lián)碛休^高性能的補(bǔ)償器,在高線壓狀態(tài)下未必能夠較好地工作。最佳方法是根據(jù)輸入電壓相應(yīng)地調(diào)節(jié)環(huán)路補(bǔ)償器。這對(duì)一個(gè)模擬控制器來(lái)說(shuō)可能是一項(xiàng)不可能完成的任務(wù),但對(duì)于如 UCD3020 等一些數(shù)字控制器來(lái)說(shuō),則可以輕松地實(shí)現(xiàn)。
這種芯片中的數(shù)字補(bǔ)償器是一種數(shù)字濾波器,其由一個(gè)與一階 IIR 濾波器級(jí)聯(lián)的二階無(wú)限脈沖響應(yīng) (IIR) 濾波器組成。控制參數(shù)即所謂的系數(shù),均保存在一組寄存器中。該寄存器組被稱作記憶槽。共有兩條這種記憶槽,每條可存儲(chǔ)不同的系數(shù)。只有一條記憶槽的系數(shù)有效,用于補(bǔ)償計(jì)算,而另一條則處于未激活狀態(tài)。固件始終都可以向未激活的記憶槽加載新的系數(shù)。在 PFC 運(yùn)行期間,可在任何時(shí)候調(diào)換系數(shù)記憶槽,以便允許補(bǔ)償器使用不同的控制參數(shù),適應(yīng)不同的運(yùn)行狀態(tài)。
有這種靈活性以后,我們可以存儲(chǔ)兩個(gè)不同的系數(shù)組(一個(gè)用于低線壓,另一個(gè)用于高線壓),并根據(jù)輸入電壓調(diào)換系數(shù)。環(huán)路帶寬、相位余量和增益余量都可在低線壓和高線壓下得到優(yōu)化。利用這種動(dòng)態(tài)調(diào)節(jié)控制環(huán)路系數(shù),并使用固件來(lái)對(duì)變流器可能出現(xiàn)的偏移量進(jìn)行補(bǔ)償,可以極大地改善 THD 和 PF。圖 5-6 是一些基于 1100W 無(wú)橋接 PFC 的測(cè)試結(jié)果,低線壓時(shí) THD 為 2.23%,高線壓時(shí) THD 為 2.27%,而 PF 分別為 0.998 和 0.996。
改善輕負(fù)載 PF
每個(gè) PFC 在輸入端都有一定的電磁干擾 (EMI) 濾波器。EMI 濾波器的 X 電容器會(huì)引起 AC 輸入電流引導(dǎo) AC 電壓,從而影響 PF。在輕負(fù)載和高線壓狀態(tài)下,這種情況變得更糟糕。PF 很難滿足嚴(yán)格的規(guī)范。要想增加輕負(fù)載的 PF,我們需要相應(yīng)地強(qiáng)制電流延遲。我們?nèi)绾螌?shí)現(xiàn)呢?
我們都知道,PFC 電流控制環(huán)路不斷嘗試強(qiáng)制電流匹配其基準(zhǔn)。該基準(zhǔn)基本上為 AC 電壓信號(hào),只是大小不同。因此,如果我們能夠延遲電壓檢測(cè)信號(hào),并將延遲后的電壓信號(hào)用于電流基準(zhǔn)生成,便可以讓電流延遲來(lái)匹配 AC 電壓信號(hào),從而使 PF 得到改善。這對(duì)一個(gè)模擬控制器來(lái)說(shuō)很困難,但對(duì)數(shù)字控制而言,只需幾行代碼便可以實(shí)現(xiàn)。
首先,輸入 AC 電壓通過 ADC 測(cè)量。固件讀取經(jīng)測(cè)量的電壓信號(hào),增加一些延遲,然后使用延遲后的信號(hào)來(lái)生成電流基準(zhǔn)。圖 7-8 顯示了基于 1100W 無(wú)橋接 PFC 的測(cè)試結(jié)果。在這種測(cè)試中,Vin = 220V,Vout = 360V,而負(fù)載 = 108W(約全部負(fù)載的 10%)。通道 1 為 Iin,通道 2 為 Vin,通道 4 為帶延遲的測(cè)量 VIN 信號(hào)。圖 7 中,經(jīng)測(cè)量的Vin沒有增加延遲,PF=0.86,THD=8.8%。圖 8 中,測(cè)量 Vin 信號(hào)被延遲了 300us,PF 改善至 0.90。進(jìn)一步改善PF是可能的,但付出的代價(jià)是 THD,因?yàn)檫M(jìn)一步延遲電流基準(zhǔn)在 AC 電壓交叉點(diǎn)產(chǎn)生更多的電流失真。圖 9 中,測(cè)量 Vin 被延遲了 500us,PF 改善為 0.92。但是,電流在電壓交叉點(diǎn)出現(xiàn)失真。結(jié)果,THD 變得更糟糕,達(dá)到 11.3%。
相比電流環(huán)路,電壓環(huán)路控制復(fù)雜度更低。數(shù)字實(shí)施時(shí),輸出電壓 VO 通過一個(gè) ADC 檢測(cè),然后同電壓基準(zhǔn)比較。我們可以使用一個(gè)簡(jiǎn)單的比例積分 (PI) 控制器來(lái)關(guān)閉該環(huán)路。
其中,U 為控制輸出,Kp 和 Ki 分別為比例項(xiàng)和積分調(diào)節(jié)增益。E[n] 為 DC 輸出電壓誤差采樣。
如前所述,使用數(shù)字控制的諸多好處之一是它能夠?qū)崿F(xiàn)非線性控制。我們使用非線性 PI 控制的目的便是提高瞬態(tài)響應(yīng)。圖 10 顯示了非線性 PI 控制的一個(gè)實(shí)例。誤差更大時(shí)(通過出現(xiàn)在瞬態(tài)下),使用更大的 Kp。誤差超出設(shè)置限制時(shí)這樣會(huì)加速環(huán)路響應(yīng),同時(shí)恢復(fù)時(shí)間縮短。使用積分器時(shí),又是另外一種情況。眾所周知,積分器用于消除穩(wěn)態(tài)誤差。但是,它通常會(huì)引起飽和問題,并且其 90 度相位滯后也會(huì)影響系統(tǒng)穩(wěn)定性。正因如此,我們使用了一個(gè)非線性積分調(diào)節(jié)增益[5](圖 10)。誤差超出一定程度時(shí),積分調(diào)節(jié)增益Ki減小,以防止出現(xiàn)飽和、過沖和不穩(wěn)定性等問題。
數(shù)字電壓環(huán)路控制的另一個(gè)優(yōu)點(diǎn)被稱為積分抗飽和。它一般出現(xiàn)在 AC 壓降狀態(tài)下。當(dāng) AC 壓降出現(xiàn),并且下游負(fù)載繼續(xù)吸取電流時(shí),DC 輸出電壓開始下降,但是 PFC 控制環(huán)路仍然嘗試調(diào)節(jié)其輸出。因此,積分器積聚,并可能出現(xiàn)飽和,這種情況被稱為積分器飽和。一旦AC恢復(fù),飽和積分器便可能會(huì)引起 DC 輸出電壓過沖。若想防止出現(xiàn)這種情況,則一旦探測(cè)到 AC 恢復(fù),固件就重設(shè)積分器,同時(shí) DC 輸出達(dá)到其調(diào)節(jié)點(diǎn)。
數(shù)字控制器還可以做得更多,例如:頻率抖動(dòng)、系統(tǒng)監(jiān)控、通信等,并且可以為無(wú)橋接 PFC提供靈活的控制、更高的集成度以及更高的性能。在一些高端的 AC/DC 設(shè)計(jì)中,現(xiàn)在越來(lái)越多的設(shè)計(jì)正在使用數(shù)字控制器。
責(zé)任編輯:haq
-
電源
+關(guān)注
關(guān)注
185文章
18841瀏覽量
263529 -
電源管理
+關(guān)注
關(guān)注
117文章
7235瀏覽量
148011 -
電壓
+關(guān)注
關(guān)注
45文章
5773瀏覽量
121841
發(fā)布評(píng)論請(qǐng)先 登錄
LM10000 自適應(yīng)電壓縮放(AVS)系統(tǒng)控制器總結(jié)

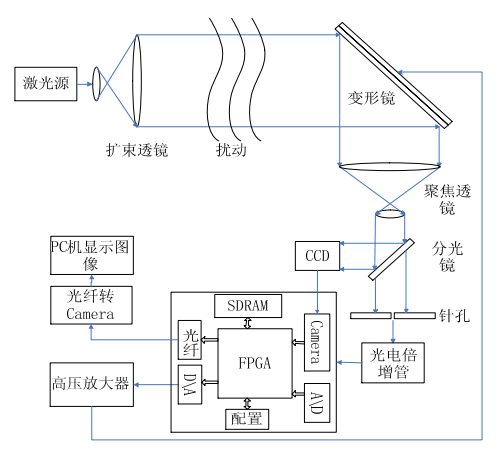
高壓放大器驅(qū)動(dòng):基于FPGA的SPGD自適應(yīng)光學(xué)控制平臺(tái)的探索
LYF91750 帶高壓?jiǎn)?dòng)的自適應(yīng)多模式PWM控制器技術(shù)手冊(cè)
替代UCC28951全橋高性能控制器具有增強(qiáng)型零電壓開關(guān)(ZVS)范圍
基于模糊自適應(yīng)PID控制的永磁同步電機(jī)伺服系統(tǒng)研究
基于FPGA LMS算法的自適應(yīng)濾波器設(shè)計(jì)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論