 機器人搭建過程中的坑和未來的改進方向
機器人搭建過程中的坑和未來的改進方向

將機器人整體開源,同時總結一下機器人搭建過程中遇到的坑和未來的改進方向。在分享的文件里包含了結構設計、程序控制、電路設計以及其他模塊相關資料供大家參考。
機器人原理分析
該機器人根據陀螺儀的位姿數據,通過三個全向輪驅動底部球體調整自己在球上的位置,保持動態平衡的同時實現全向移動。
保持動態平衡過程需要對機器人進行運動學分析,這里參考了平衡小車之家的運動學方程:
自平衡控制問題轉化為三步:輸入X、Y角度—控制器計算—輸出A、B、C電機轉速的控制模型。
控制器設計
首先考慮參考平衡車控制,球上自平衡機器人本質上依然是一個一階倒立擺問題。
這里參考了飛思卡爾直立車的控制方法,采用串級PID控制器,外環PD角度環,內環速度PI環。
由于我的驅動方案選擇的是42步進電機,在速度閉環的時候有些問題。正常的直流電機+編碼器的控制方案可以通過編碼器將輪子的真實速度計算出來,從而和控制器的理想轉速作差,實現速度控制。
而我這里的速度閉環是通過計算上一個時鐘周期時給步進電機的控制量,通過運動學方程分解,得到機器人的虛擬速度,與理想轉速作差控制。我認為這種速度閉環方式還是存在一定缺陷的,但是在網上查看論文的時候我發現有很多自平衡機器人都是用42步進電機來實現速度閉環的,不知道是什么方法。
這里還可以好好思考一下為什么角度環要用PD控制,速度環要PI控制,角度環的P部分和D部分對機器人控制有什么影響?在很多CSDN調試平衡車的博客中都有解釋,這里就留給大家思考了。
硬件及結構設計
自平衡機器人的硬件清單有:
56mm全向輪 45元/個
42步進電機 25/個
42步進閉環模塊 59.8元/個
LM2596S降壓模塊 20元
STM32F103C8T6-4飛控板 59.8元
GY-521六軸陀螺儀 25元
用到的模塊大致如上所示,C8T6的價格隨著最近芯片漲價直線上升,我白嫖了實驗室的兩塊板子,現在買一塊實在太貴,可以等芯片價格穩定一些再買。其余開關排針等常見元件不再贅述。
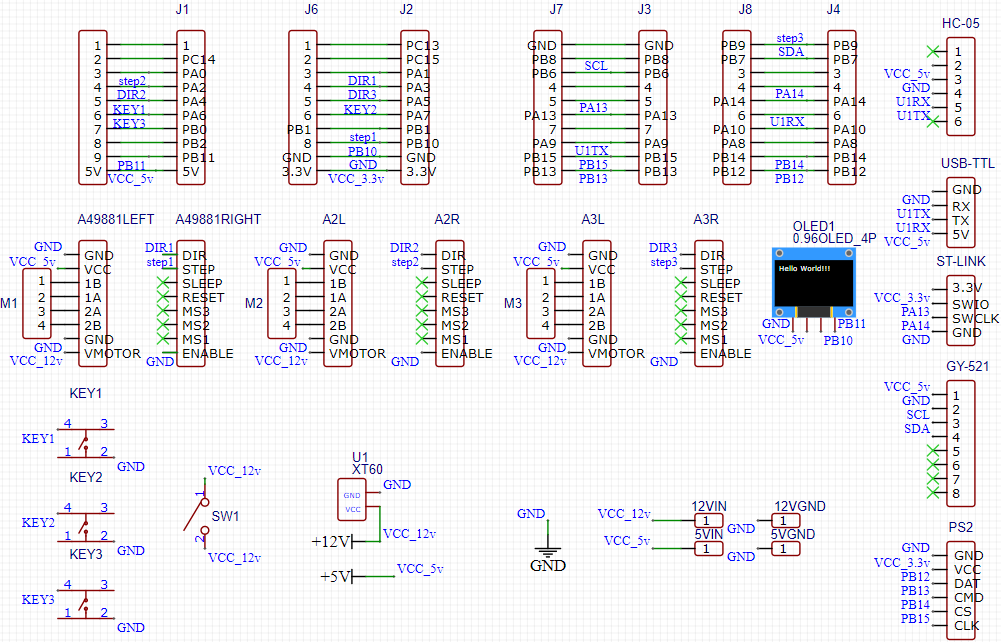
電路原理圖如下所示:
機器人使用solidworks設計整體結構,底板可在某寶定制6050太空鋁切割,藍色件為正常3D打印件。
程序部分
在keil 5中開發STM32。
控制程序采用定時器0.5ms定時中斷的方式進行計算,每觸發兩次中斷計算對電機控制一次,這里還是推薦大家采用外部中斷讀取GY-521上的INT引腳的方式,控制計算周期。GY-521上的INT引腳每5ms觸發一次跳變,采用外部中斷的方式可以嚴格保證讀取位姿數據與計算處理同步。
int TIM1_UP_IRQHandler (void) { u8 key_cal; if(TIM_GetITStatus(TIM1,TIM_IT_Update) != RESET) { TIM_ClearITPendingBit(TIM1,TIM_IT_Update); flag_target=!flag_target; key_cal=KEY_Scan(0); if(state_flag==1)//矯正結束 { if(flag_target==1)//每讀取兩次陀螺儀控制一次 { Read_DMP(); //===讀取傾角 scope();
return 0; } } if(key_cal==1)//矯正按鍵 { Angle_Zero_X=Angle_Balance_X; Angle_Zero_Y=Angle_Balance_Y; key_cal=0; Flag_Stop=0; } if(key_cal==2||key_cal==3)//矯正按鍵 { Flag_Stop=1;//關閉速度環I積分 key_cal=0; } Angle_Bias_X =Angle_Balance_X-Angle_Zero_X;
//獲取Y方向的偏差 Angle_Bias_Y =Angle_Balance_Y-Angle_Zero_Y; //獲取Y方向的偏差 if(control_mode==0)//PID控制模式 { Encoder_Analysis(Motor_A,Motor_B,Motor_C); //正運動學分析,得到X Y方向的速度 Balance_Pwm_X= balance_X(Angle_Bias_X,Gyro_Balance_X);
//X方向的傾角控制 Balance_Pwm_Y=-balance_Y(Angle_Bias_Y,Gyro_Balance_Y); //Y方向的傾角控制// if(++flag_target_2==4)//速度環頻率慢于加速度環 但是還沒加速度環 // { Velocity_Pwm_X=velocity_X(compute_X);
//X方向的速度控制 Velocity_Pwm_Y=velocity_Y(compute_Y); //Y方向的速度控制 // flag_target_2=0;// } Move_X =Balance_Pwm_X+Velocity_Pwm_X;
//===X方向控制量累加 Move_Y =Balance_Pwm_Y+Velocity_Pwm_Y; //===Y方向控制量累加 Move_Z=0; Kinematic_Analysis(Move_X,Move_Y,Move_Z);//逆運動學分析得到ABC電機控制量 } Motor_A=Target_A;//直接調節PWM頻率 Motor_B=Target_B;//直接調節PWM Motor_C=Target_C;//直接調節PWM//以下都是為了速度連續化處理防止突變
if(Motor_A==0) Motor_A=motor_a_last; if(Motor_B==0) Motor_B=motor_b_last; if(Motor_C==0)
Motor_C=motor_c_last; Xianfu_Pwm(2000); Set_Pwm(Motor_A,Motor_B,Motor_C);
Gyro_Balance_X_last=Gyro_Balance_X; Gyro_Balance_Y_last=Gyro_Balance_Y;
Gyro_Balance_Z_last=Gyro_Balance_Z; Angle_Balance_X_last=Angle_Balance_X;
Angle_Balance_Y_last=Angle_Balance_Y; Angle_Balance_Z_last=Angle_Balance_Z;
motor_a_last=Motor_A; motor_b_last=Motor_B; motor_c_last=Motor_C; } return 0;}
對于電機控制,由于采用的驅動方案是步進電機,調速的方式是改變驅動步進電機的脈沖頻率。我這里選擇了三個定時器,動態調節定時器的頻率,具體方式是在初始化時設定好定時器的預分頻系數psc的值,然后在程序里動態更改ARR寄存器的值,從而改變定時器的定時頻率。
//這里以A電機的速度控制為例 輸入為 電機方向和電機速度void set_motorA_speed(u8 dir,u16 speed){ u32 arr; arr=speed; TIM_ARRPreloadConfig(TIM3,DISABLE); TIM3-》ARR=arr;//計數到10000在歸零重新計數 TIM3-》CCR4=arr/2;//保持占空比為50% TIM_ARRPreloadConfig(TIM3,ENABLE); TIM_Cmd(TIM3,ENABLE);
if(dir==0) { GPIO_SetBits(GPIOA,GPIO_Pin_1); } else { GPIO_ResetBits(GPIOA,GPIO_Pin_1); }}
小車的運動學分解代碼實現如下,參考了平衡小車之家的代碼:
/**********************************************************函數功能:小車運動數學模型入口參數:X Y Z 三軸速度或者位置返回 值:無***********************************************************/void Kinematic_Analysis(float Vx,float Vy,float Vz)
{ Target_A = Vx + L_PARAMETER*Vz; Target_B = -X_PARAMETER*Vx + Y_PARAMETER*Vy + L_PARAMETER*Vz; Target_C = -X_PARAMETER*Vx - Y_PARAMETER*Vy + L_PARAMETER*Vz;}/*****************************************************************函數功能:小車運動 正運動學分析 入口參數:A B C三個電機的速度返回 值:無******************************************************************/void Encoder_Analysis(float Va,float Vb,float Vc){ compute_X=(Va*2-Vb-Vc); compute_Y=((Vb-Vc)*sqrt(3)); compute_Z=(Va+Vb+Vc); }
其余代碼不全放出,可在文末點擊“閱讀原文”下載查看。
總結與展望
球上自平衡機器人可以作為算法試驗平臺, 輸入輸出固定,更換不同控制器,將數據導入MATLAB進行分析即可比較控制器性能。
個人認為結構有兩個改進方向,一方面參考以下論文:余義。 單球驅動自平衡機器人位姿解算與控制系統研究[D]。武漢科技大學,2019。論文中采用的四足式驅動結構更有利于機器人自平衡控制。
另一方面可以增加球體和機器人固定裝置,利用機械結構將機器人與底部驅動球結合成一個整體防止機器人跳輪等問題。同時驅動球對于機器人平衡的影響較大,最好還是定制空心鋼球,然后噴漆增大摩擦力,最有利于機器人自平衡控制。
控制部分的改進,首先是控制原理,本文是針對建立好的運動學方程進行分析,通過串級PID算法來實現自平衡運動。該機器人的控制問題本質上是一階倒立擺問題,可以采用動力學建模的方式,通過動力學分析算出平衡需要的虛擬力矩,再對電機進行力矩控制。
其次是控制器,PID控制算法應用廣泛但也有一定的缺點,可以考慮采用模糊PID,ADRC自抗擾控制器,強化學習等智能控制算法對機器人自平衡進行控制。
原文鏈接:https://blog.csdn.net/qq_42823167/article/details/118085368
責任編輯:haq
-
機器人
+關注
關注
213文章
31320瀏覽量
223394 -
STM32
+關注
關注
2312文章
11183瀏覽量
374363
原文標題:STM32自平衡機器人項目,附代碼、電路圖等資料
文章出處:【微信號:c-stm32,微信公眾號:STM32嵌入式開發】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
探索RISC-V在機器人領域的潛力
高壓放大器在機器人攀爬速度測試實驗中的應用
小蘿卜機器人的故事
自制巡線解迷宮機器人(上)
什么是機器人?追溯機器人技術的演變和未來




 工商網監
工商網監
評論