") 深度解讀機(jī)器人互鎖及工位的釋放信號(hào)的編寫
深度解讀機(jī)器人互鎖及工位的釋放信號(hào)的編寫

所有夾具和機(jī)器人的釋放安全信號(hào)是A/E80-57,通過(guò)PLC順序塊控制機(jī)器人工作,如上件,焊接,下件。
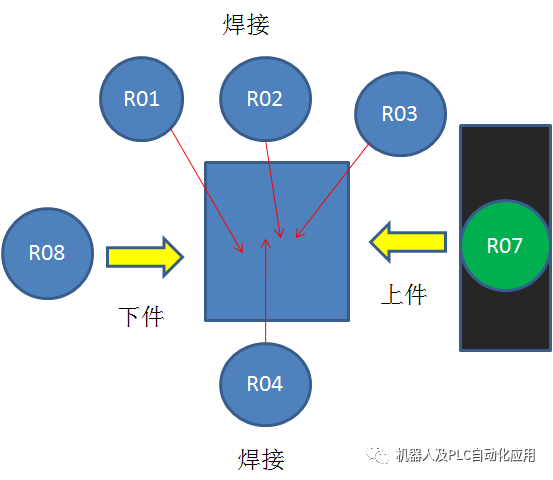
這時(shí)我們需要編寫焊接機(jī)器人之間的互鎖信號(hào),以及上件機(jī)器人與焊接機(jī)器人之間的互鎖信號(hào),以及下件機(jī)器人與焊接機(jī)器人的互鎖
因此一個(gè)機(jī)器人在進(jìn)入程序第一步準(zhǔn)備工作時(shí)會(huì)先釋放所有機(jī)器人之間的互鎖信號(hào),讓后釋放和工位之間的安全信號(hào),最后等待PLC如許進(jìn)入工位焊接的釋放信號(hào)。
------機(jī)器人之間的互鎖信號(hào)-------
6: A47 = EIN
7: A48 = EIN
8: A49 = EIN
9: A50 = EIN
10: A51 = EIN
11: A52 = EIN
12: A53 = EIN
13: A54 = EIN
14: A55 = EIN
15: A56 = EIN
------機(jī)器人與PLC工位之間的防撞信號(hào)
17: A80 = EIN
18: A77 = EIN
19: A74 = EIN
20: A71 = EIN
21: A68 = EIN
等待PLC釋放機(jī)器人開始工作
22: WARTE BIS E80 & E77 & E74 & E68
一旦PLC釋放機(jī)器人開始工作,機(jī)器人會(huì)關(guān)閉與PLC的安全信號(hào)
23: A80 = AUS
24: A77 = AUS
25: A74 = AUS
26: A68 = AUS
機(jī)器人不論是否在防撞區(qū)都會(huì)等待等待防撞信號(hào),這是大眾標(biāo)準(zhǔn)處于安全作出的考慮。
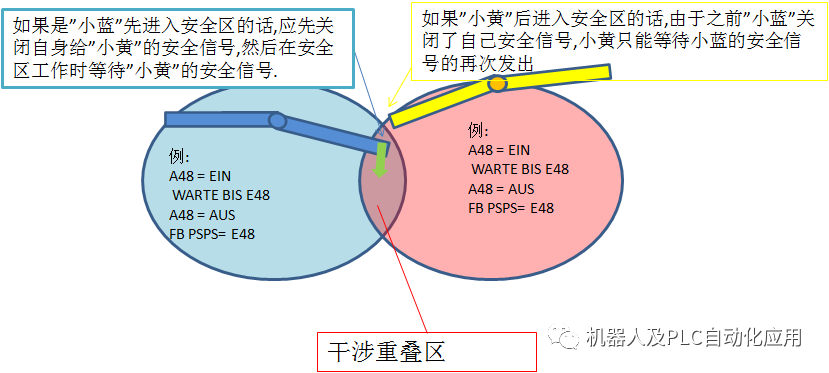
3: -- 在進(jìn)入兩機(jī)器人工作重疊區(qū)時(shí)需要關(guān)閉防撞區(qū),通過(guò)PLC程序--
4: A91 = EIN
5: SPSMAKRO20 = EIN
-- 在進(jìn)入兩機(jī)器人工作重疊區(qū)時(shí)需要關(guān)閉防撞區(qū),通過(guò)PLC程序–
7: A94 = EIN
8: SPSMAKRO20 = EIN 用來(lái)關(guān)閉機(jī)器人之間的防撞信號(hào)使其他機(jī)器人不能進(jìn)入。
這時(shí)會(huì)增加等待機(jī)器人之間的互鎖信號(hào),因?yàn)槟阍谶M(jìn)入重疊工作區(qū)時(shí),需要相對(duì)應(yīng)機(jī)器人釋放出相應(yīng)的安全信號(hào),否則機(jī)器人在重疊區(qū)內(nèi)將等待互鎖信號(hào)。
FB PSPS = M30 & M95 & E51 & E52 & E68 & E74 & E77 & E80
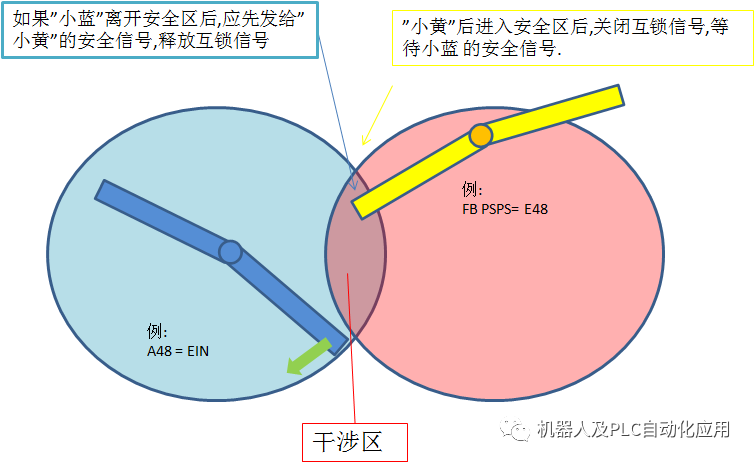
離開重疊干涉區(qū)后會(huì)發(fā)出之前關(guān)閉的互鎖信號(hào),潤(rùn)許相對(duì)機(jī)器人進(jìn)入,同時(shí)可以不再等待與`對(duì)應(yīng)機(jī)器人之間的互鎖信號(hào)
5: A50 = EIN 發(fā)出釋放信號(hào)
不再等待之前的互鎖信號(hào)
FB PSPS = M30 & M95 & E51 & E52 & E68& E71 & E74 & E77 & E80
機(jī)器人結(jié)束工作后會(huì)釋放與工位的安全信號(hào),和機(jī)器人之間的互鎖信號(hào)。
機(jī)器人于工位之間的安全信號(hào)釋放
4: A80 = EIN
5: A77 = EIN
6: A74 = EIN
7: A68 = EIN
8: -- 機(jī)器人之間的互鎖信號(hào)釋放--
9: A51 = EIN
10: A52 = EIN
編輯:jq
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31079瀏覽量
222255 -
plc
+關(guān)注
關(guān)注
5051文章
14594瀏覽量
486920 -
焊接機(jī)器人
+關(guān)注
關(guān)注
16文章
359瀏覽量
15969
原文標(biāo)題:機(jī)器人互鎖及工位的釋放信號(hào)編寫
文章出處:【微信號(hào):gh_a8b121171b08,微信公眾號(hào):機(jī)器人及PLC自動(dòng)化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
再談低溫?zé)Y(jié)銀的應(yīng)用:從春晚四家機(jī)器人出鏡的幕后推手說(shuō)起
復(fù)合機(jī)器人對(duì)比傳統(tǒng)AGV和機(jī)械臂的優(yōu)勢(shì)何在?

RK3576機(jī)器人核心:三屏異顯+八路攝像頭,重塑機(jī)器人交互與感知
深度解讀人形機(jī)器人電感產(chǎn)品需求及應(yīng)用選型技巧



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論