 機械臂無刷電機設計的核心是什么
機械臂無刷電機設計的核心是什么

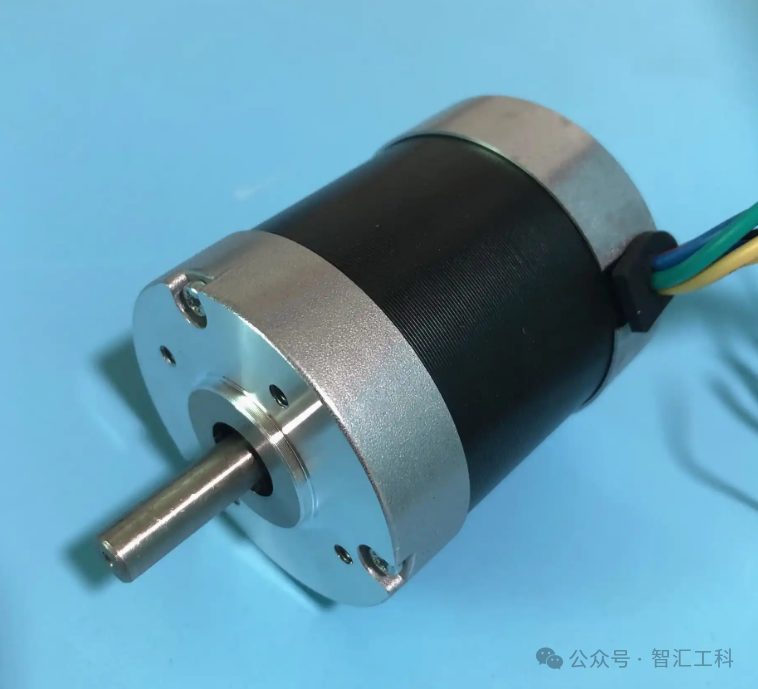
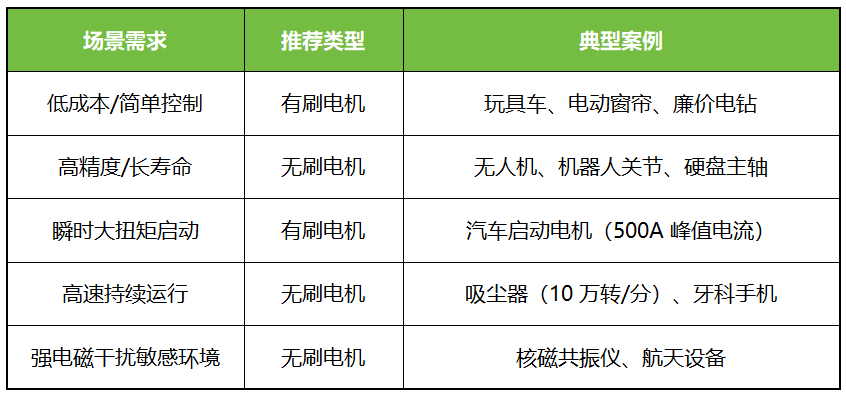
機械臂無刷電機目的是可以讓電機轉速不必控制在低轉速范圍;而且,能夠起到杠杠作用在減小輸出轉速的同時,增大力矩。因此,將要求電機輸出較大轉矩。對電機的功率密度也將提高要求。
機器人運動基礎核心組件是運動關節。在機器人和機械臂應用中,關節作為最基礎的運動單元。
根據阿基力矩的定義公式可以計算出來。即力矩(T)=功率(P)*9.8/轉數(N),或者互相轉換因素也可以這樣子:T*轉數/9.8=功率。
當我們選擇的直流無刷電機功率為1000W時,而電機的轉數為3000轉/分,根據阿基力矩的定義公式則有1000*9.8/3000=3.27NM.,或者知道了無刷電機的力矩T,要求功率時,則可以這樣子換算:3.27NM*3000/9.8≈1000W.這就是直流無刷電機力矩的計算公式。
fqj
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
無刷電機
+關注
關注
60文章
954瀏覽量
49361 -
機械臂
+關注
關注
14文章
596瀏覽量
26127
發布評論請先 登錄
相關推薦
熱點推薦
無刷電機PCBA板廠家
作為專注于無刷電機PCBA板研發與生產的核心廠家,鈿馳科技推出了覆蓋多場景需求的無刷電機驅動板,涵蓋TC-BL2430、TC-BL3650、TC-BL3625、TC-BL2840、TC-BL3028

其利天下吸塵器無刷電機控制方案
吸塵器通過電機驅動形成強勁氣流,利用負壓原理高效吸附灰塵與碎屑。其電機核心需求在于高轉速、大扭矩、小體積、低能耗與長壽命。當前,高端手持及立式無繩吸塵器普遍采用無刷電機,以實現更強吸力

復合機器人對比傳統AGV和機械臂的優勢何在?
復合機器人對比傳統AGV和機械臂的優勢,核心在于它突破了單一設備的功能局限,實現了“移動+操作”的深度協同,尤其在上下料和物料轉運場景中優勢顯著。經世智能復合機器人:重新定義上下料與物料轉運的效率

無感無刷電機的結構——【其利天下】
兩大部分組成: 電機本體 和 電子調速器(ESC) 。其中,電機本體的機械結構與有感電機幾乎完全相同,核心差異全在于電子調速器。 一、
無刷電機的旋轉原理
于: 有刷電機用機械電刷和換向器改變轉子磁場,而無刷電機是用電子線路和傳感器來改變定子磁場。 下面我們通過幾個關鍵部分來詳細解釋: 核心組成部分 轉子: 是永磁體,通常由稀土磁鐵(如釹
傳統測試設備的局限與協作機械臂的破局
在協作式測試設備的研發與落地中,北京沃華慧通測控技術有限公司憑借深厚的測控技術積累,成為行業核心賦能者。作為專注于智能測控設備研發的高新技術企業,北京沃華慧通測控技術有限公司深度把握協作機械臂的技術特性,構建了 “

協作機械臂產品介紹
電子發燒友們、工業自動化從業者、科研工作者們注意啦!今天給大家重磅介紹一款在機械臂領域表現極為亮眼的產品——協作機械臂,它正以卓越性能重塑行業格局!?(壹捌伍 柒零零玖 壹壹捌陸)卓越
發表于 08-07 17:20
?0次下載
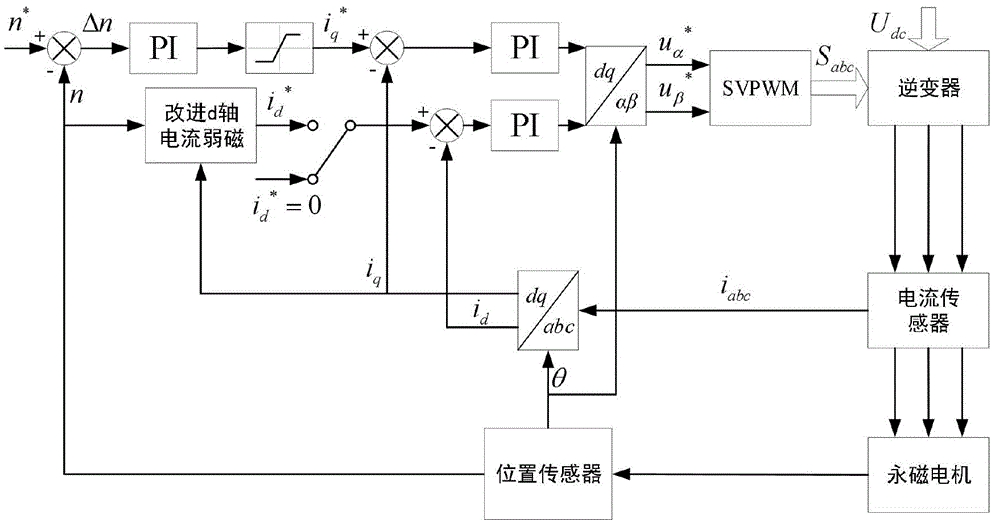
無刷電機弱磁控制:技術原理與實戰應用
在電機控制領域,弱磁控制技術一直是備受關注的焦點之一。尤其是對于無刷電機來說,弱磁控制不僅能夠提升其性能,還能拓展其應用范圍。今天,就讓我們深入探討一下無刷電機弱磁控制的奧秘以及它所帶來的諸多
霍爾IC在無刷電機中的應用與原理
霍爾IC在無刷電機中的應用與原理可分為以下兩部分闡述:
一、核心應用
?轉子位置檢測?
無刷電機通過霍爾IC實時監測轉子永磁體的磁場位置,生成與磁極位置相對應的數字或模擬信號。例如,三相無刷電
發表于 07-29 14:55
浮思特 | 無刷電機與有刷直流電機的區別是什么,該如何選擇?
依賴機械電刷換向,后者則通過電子控制實現磁場切換。盡管二者均基于電磁作用原理,但在實際應用中需根據性能需求權衡選擇。有刷直流電機工作原理有刷電機的核心在于其
GZCOM-NET:為機械臂測試帶來高效無線解決方案!
在智慧工廠中,機械臂的性能和安全性需通過靜態與動態測試來保障。批量化測試時,后臺需實時顯示數據曲線和異常數據。GZCOM-NET憑借高效穩定的無線傳輸,為機械臂測試提供可靠方案。行業背

無刷電機詳解及其應用
,核心在于通過電子換向替代機械換向,從而實現更精準的控制和更高的能量轉換效率。以下將從結構組成、磁場控制、換向機制等維度深入解析無刷電機的工作奧秘。 一、結構設計:磁場與繞組的精密配合 無刷電
無刷電機的驅動MOSFET
,而高空作業無人機正用高壓水刷洗摩天幕墻——這些看似平常的設備,背后都藏著無刷電機+電子驅動的精密控制系統。 一、電機驅動的技術內核:從機械換向到電子革命 機械換向時代—有刷
無刷電機FOC控制筆記
矢量控制的核心思想是為了簡化無刷電機的控制模型,將一個需要換相的無刷電機通過各種算法變換,抽象為一個直流電機的控制模型,只需要控制簡單的兩個直流分量來控制



 工商網監
工商網監
評論