 剖析模糊控制的步進梁速度控制系統
剖析模糊控制的步進梁速度控制系統

0 引言
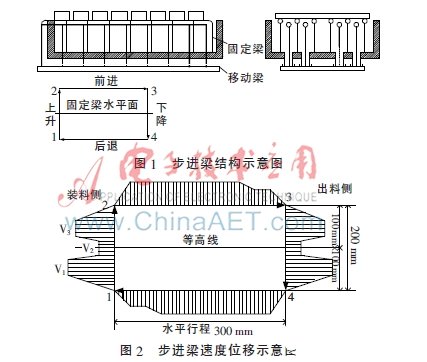
步進梁是步進式加熱爐的核心設備,鋼坯的移動是通過步進梁的靜梁和動梁的相對運動來實現的,步進梁的動梁作上升、前進、下降、后退等動作將鋼坯送入加熱爐加熱。步進梁的結構如圖1所示。步進梁的速度給定須精確控制,以減少其運動慣性和沖擊,減少對步進梁系統的損壞,在每個運動的起始階段和終止階段,步進梁分別作加速運動和減速運動。
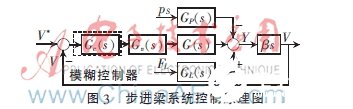
在上升和下降的中間階段,由于步進梁接近鋼坯,步進梁進行一次中間減速-勻速-加速運行過程,以減少負荷對步進梁的沖擊,達到鋼坯在爐內“輕托、輕放”的目的。步進梁速度位移示意圖如圖2所示。步進梁的動力是由電液比例方向閥和液壓缸組成的液壓系統提供,通過電液比例方向閥控制流量以驅動液壓缸的移動來實現的。
在工程實踐中,步進梁的控制多采用開環控制,控制效果差[1-3],控制精度并不能滿足要求。鑒于本文的控制對象是一個典型的非線性、時變、強干擾系統,本文設計了一種基于規則校正的模糊PID控制器,該控制器可使系統有更快地響應且有一定的抗干擾能力。
1 閥控非對稱液壓缸系統建模
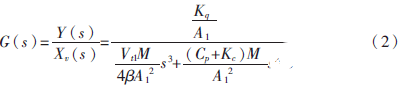
步進梁系統由電液比例方向閥、液壓缸和步進梁組成。當液壓缸活塞外伸時完成鋼坯上升和前進動作;當液壓缸活塞內縮時完成鋼坯下降和后退動作。本文以步進梁上升動作為例來說明。步進梁系統控制原理圖如圖3所示。
電液比例方向閥閥芯位移Xv(s)與控制信號U(s)之間的傳遞函數為[2,4-5]:

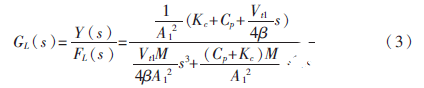
液壓缸的活塞位移Y(s)與閥芯位移Xv(s)之間的傳遞函數為:
活塞位移Y(s)與負載FL(s)之間的傳遞函數為:
活塞位移Y(s)與油源壓力Ps(s)之間的傳遞函數為:
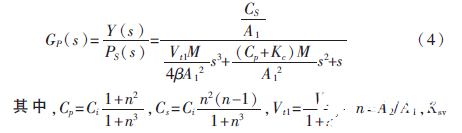
為電液比例閥的增益,Tsv為電液比例閥的時間常數,Kq為流量增益,A1為無桿腔的有效面積(m2),A2為有桿腔的有效面積(m2),Ci為液壓缸內泄漏系數(m3/(s·Pa)),V1為液壓缸進油腔的容積(m3),e為油液的有效體積彈性模量(包括油液、混入油液中的空氣、連接管道及缸體的機械柔度的影響)(Pa),ps為油源壓力(MPa),M為活塞及負載總質量(kg),Kc為流量-壓力系數,xv為電液比例閥閥芯位移(m)。
當步進梁滿負荷工作時鋼坯重達450 t,為減經作用在液壓缸活塞桿上的力,故采用雙輪斜軌式步進機構,如圖4所示。
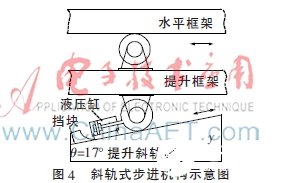
則可得液壓缸的位移y(m)與鋼坯的位移ys(m)滿足如下關系式:

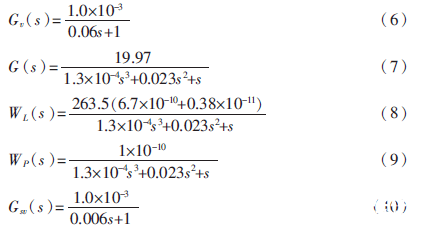
本文以山東某鋼廠為研究對象,根據測得的相關參數[2],可得如下傳遞函數的表達式:
2 模糊PID控制器設計
自整定模糊PID控制器的結構如圖5所示。
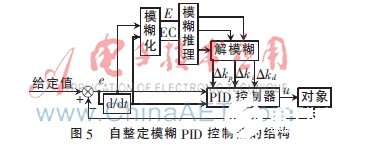
它以偏差e和偏差變化率ec作為輸入,以PID控制器的參數kp、ki、kd作為輸出。它利用模糊理論對PID參數進行校正,校正算法如下:kp=kp′+
kp,ki=ki′+
ki,kd=kd′+
kd,其中kp′、ki′、kd′是預先調定的量,
kp、
ki、
kd為模糊控制器的輸出,kp、ki、kd為PID控制器的輸出[6]。
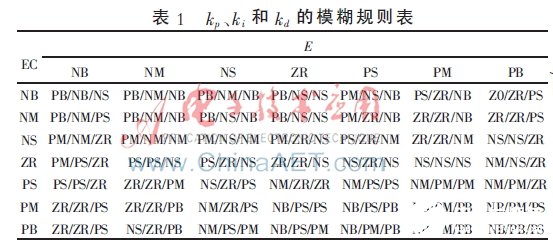
定義偏差e、偏差變化率ec及kp、ki、kd的論域均為 {-6,6};其模糊子集{PB,PM,PS,ZR,NS,NM,NB},子集中的元素分別為負大、負中、負小、零、正小、正中、正大。為了計算機處理和實現上的方便,輸入偏差、輸入變化率|EC|和輸出的隸屬度函數均采用線性函數[7]。
該模糊控制器的控制規則采用“IF A AND THAN C”的形式建立。根據自整定模糊PID控制的設計思想可得kp、ki、kd的模糊控制規則如表1所示[8]。
3 系統仿真分析
為驗證所設計步進梁液壓系統的性能,采用MATLAB/Simulink中的軟件包和模糊邏輯工具箱FIS來模擬該控制系統的仿真環境。其中模糊控制器的參數ke= 0.2、kec=1、
kp=1、
ki=4.5、
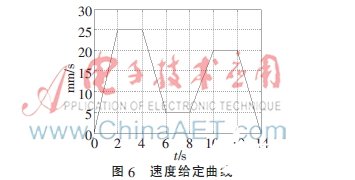
kd=0.2;PID的初值為kp′=16、ki′=30、kd′=0.5。速度給定曲線如圖6所示。
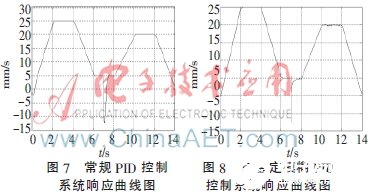
常規PID控制系統響應曲線如圖7所示,在第7秒時由于托起重達450 t的鋼坯,速度有較大的下降,故考慮采用模糊自整定PID控制。自整定模糊PID控制系統響應如圖8所示,由圖可以看出速度下降明顯減少且響應明顯加快。
4 結論
步進梁是步進式加熱爐中的重要設備,步進梁的速度須精確控制,當步進梁上升托起鋼坯時由于鋼坯的大重量使得其速度會大幅度下降,考慮到步進梁系統是非線性和時變系統,故本文分別用PID控制器和自整定模糊PID控制器對步進梁系統進行對比研究。仿真結果表明,與傳統PID控制器相比,模糊PID控制器具有響應速度快、抗干擾能力強的特點,基本上達到了對步進梁系統快速、平穩控制的要求,很好地緩解了設備沖擊,另外也為該控制方法在其他場合上的應用提供了參考。
參考文獻
[1] 楊征瑞,花克勤,徐軼.電液比例與伺服控制[M].北京:治金工業出版社,2009.
[2] 鄒陽舉.步進式加熱爐電液控制系統分析與建模[D].合肥:合肥工業大學,2013.
[3] 馬曉宏,陳冰冰,甘學輝,等.電液比例閥控液壓缸位置控制系統的建模與仿真研究[J].機械設計與制造,2008(4):43-45.
[4] 強寶民,劉保杰.電液比例閥控液壓缸系統建模與仿真[J].起重運輸機械,2011(11):35-39.
[5] Guo Rui, Zhao jingyi. Research of electro-hydraulic control system design and energy saving characteristic in the new drawbead test bed[R]. Beijing: Fluid Power and Mechatronics(FPM), 2011, 2011 International Conference of Digital Object Ident-ifier, 2011:301-305.
[6] 周恩濤,廖生行,牟丹.電液比例閥控系統模糊-PID控制的研究[J].機床與液壓,2003(6):225-227.
[7] 顏香梅,王輝,李中啟,等.基于模糊邏輯的無線電能傳輸輸出端穩壓控制[J].電子技術應用,2014,40(12):72-75.
[8] 王恩亮.模糊PID控制的中頻電爐溫控系統設計[J].微型機與應用,2014,33(24):75-77.
編輯:jq
-
液壓缸
+關注
關注
0文章
23瀏覽量
9514 -
模糊PID控制
+關注
關注
0文章
14瀏覽量
7690 -
速度控制
+關注
關注
0文章
38瀏覽量
8265
發布評論請先 登錄



 工商網監
工商網監
評論