 基于TMS320DM6446ZWT評估板和Linux實現車道偏離預警系統的設計
基于TMS320DM6446ZWT評估板和Linux實現車道偏離預警系統的設計

研究表明,大約15%的道路交通事故是由車輛駛離公路造成的,車道偏離預警系統能夠有效減少道路交通事故的發生。目前車道偏離預警系統采用的方法大致分為3種:1)基于車輛將到達車道邊界時間(Time to Lane Crossing,TLC)的預警算法;2)基于預測軌跡曲線偏離量不同的預警算法;3)基于平面圖像道路標線夾角的預警算法。這幾種算法能夠實現車道預警,但車輛出現偏離一般是由于駕駛員注意力分散或處于疲憊狀態時對車輛的控制疏忽所致,上述所做的各種假設與實際行駛過程均有偏差,如沒有考慮車輛的橫向偏轉角及駕駛員轉動方向盤轉角在某個行駛過程中對車道偏離的影響。鑒于此,提出基于車輛橫向距離與橫向分速度進行車輛偏離預警的方法。作為車道偏離預警系統的處理平臺,PC機的體積、成本及功能的冗余性是其應用在車載系統中難以克服的瓶頸,采用嵌入式方法對車道偏離預警系統的設計,充分利用了嵌入式系統處理的實時性與體積小巧等特點。
1 道路圖像的處理
使用Sobel算子邊緣檢測和最大類間方差圖像分割法將道路灰度圖像轉化為二值圖像,作為下一步處理的基礎。直線的矢量基元表示方法是按照某種準則將矢量基元(ELS)合并連接來表示直線。如行基元、列基元和45°基元。行基元是道路圖像中同一行上的連續邊緣點的集合;列基元是道路圖像中同一列上的連續邊緣點的集合;45°基元是道路圖像中在傾角為45°。或135°的掃描線上連續邊緣點的集合。其優點是計算耗費的時間與變量存儲需要的空間較少。
Hough變換是利用投票機制參照圖像全局特性對目標直線輪廓進行直接檢測。其優點是對直線斷裂、局部遮擋等缺陷不敏感,對隨機噪聲具有魯棒性,特別適用于直線道路的識別。利用直線的矢量基元減少Hough變換中參數的量化范圍,能夠節省Hough變換的時間和空間消耗,同時彌補矢量基元表示直線的局部性和噪聲敏感性等不足,較好識別道路標識線。
2 行駛車輛位置的確定
2.1 道路關鍵信息的重建
圖像傳感器固定在車輛前端頂部,攝像頭距地面高度為h。建立空間坐標系如下:世界坐標系XYZ與攝像機坐標系xyz。動態的世界坐標系隨車輛一起運動,以攝像機鏡頭中心在地面的垂直投影點為原點,地面的垂直線向上為Z軸正向,車身縱軸線方向為X軸,正向為汽車前進的反方向;攝像機坐標系統以光軸為z軸,鏡頭中心為坐標原點,攝像機坐標xy平面與像平面平行;表征圖像內部各點位置的像平面坐標系統的u軸、v軸與x軸、y軸平行,原點位于圖像中心既攝像機光軸與圖像的交點。所有坐標系滿足右手規則。
平面圖像上某點(u,v)經過逆透視投影變換后獲取其在空間點(X,Y,Z)的位置信息,由此重建道路關鍵信息
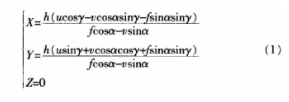
式中,f為攝像機的有效焦距,γ表示攝像機x坐標軸相對于X軸的夾角稱為掃視角,α表示攝像機光軸(z軸)相對于垂直方向(Z軸)的夾角稱為傾斜角。
2.2 車輛在當前道路中橫向距離及橫向偏轉角的確定
利用改進的Hough變換識別道路標識線后,通過圖像平面的道路標線直線方程和式(1),得到左、右道路標識線在世界坐標系內的直線方程
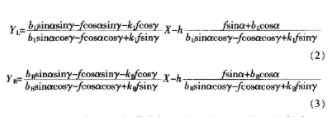
式中,kL與kR為左、右道路標識線在平面圖像上的斜率,bL和bR為左、右道路標識線在v軸上的截距。結合圖像傳感器的安裝高度以及鏡頭焦距等參數,可以獲得車輛距道路標識線的橫向距離及橫向偏轉角,如圖l所示。
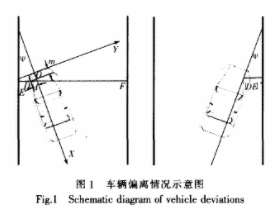
圖l中,點0代表攝像機鏡頭中心在路面的垂直投影點,點D代表車輛的左前輪,點D與CCD攝像機鏡頭中心在汽車縱向平面及橫向平面的距離分別為m,d,汽車縱向平面與道路標識線的夾角ψ稱為橫向偏轉角。
車輛在車道中的位置采用左前車輪距左標線的橫向距離|DE|或左前車輪距右標線的橫向距離|DF|表示。或者采用右前車輪距右標線的橫向距離|DE|’或右前車輪距右標線的橫向距離|DF|’表示,則根據三角幾何關系推導出的計算公式
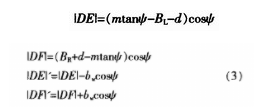
式中,bw為車輛輪距,BL、BR為左、右道路標線在Y軸上的截距,其值決定于道路標識線的空間方程。橫向偏轉角ψ表示汽車行駛過程相對于道路標識線的偏離方向,通過道路標識線空間方程計算得出,滿足tanψ=-KL,KL為左道路標線的斜率。
3 車道偏離預警
3.1 預警算法的建立
通過車輛距道路標識線的橫向距離和橫向速度估算車輛到達道路標線的時間,當時間小于設定閾值時啟動車道偏離預警。車輛的橫向速度可以通過橫向距離的變化得到,由于計算車輛距道路標線的橫向距離的采樣周期較短(O.1 s),在該段時間內認為車輛做橫向勻速運動。車輛的橫向分速度也可以由車速傳感器獲得的速度信號和橫向偏轉角確定,為減少測量誤差的影響采用二者的平均值作為橫向速度的取值。
車輛在車道中的橫向位置用前車輪距道路標線的距離表示,車輛向左偏轉時,用左前車輪距左道路標線的距離|DE|表示;車輛向右偏轉時,用右前車輪距右道路標線的距離|DE|’表示,如圖1所示。車輛在車道中的行駛方向用車輛縱向平面相對于道路標識線的偏轉角ψ表示,車輛偏向左方時,ψ為正值;車輛偏向右方時,ψ為負值。
車道偏離預警主要作用于駕駛員由于注意力分散或疏忽造成的無意偏離,當車輛的轉向燈信號開啟時,說明駕駛員有意圖轉向,此時屏蔽系統的偏離車道預警功能。當本車距道路標識線的橫向距離與橫向車速的比值小于規定的時間時,認為車輛即將偏離車道行駛,需要報警。系統的預警算法如下:車輛位置參數滿足式(4)并且ψ>0時,為車道偏離預警時刻,方向偏向左。
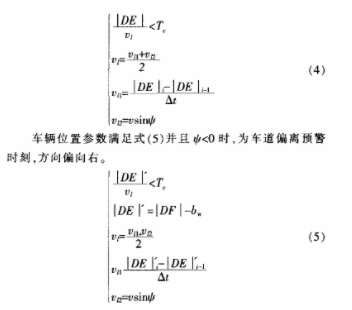
式中,v、vl2表示由速度傳感器獲得的瞬時速度及其橫向分量,vl為瞬時橫向速度,vl1為用橫向距離計算的橫向速度。|DE|i,|DE|‘in分別代表第i幀的車輛橫向位置,|DE|i-1,|DE|’i-1h分別代表第i-1幀的車輛橫向位置,bw代表車輛輪距,△t表示采樣時間間隔,Tc是車輛偏離車道預警的時間閾值,這里取0.9 s。
3.2 系統軟件設計
車輛偏離預警系統的實時性要求處理器有較快的運行速度和超強的實時調度能力,研究中選用基于DSP和ARM9雙核的TMS320DM6446ZWT片上系統(SoC)的評估板作為系統的硬件平臺;選用Linux系統作為嵌入式操作系統。
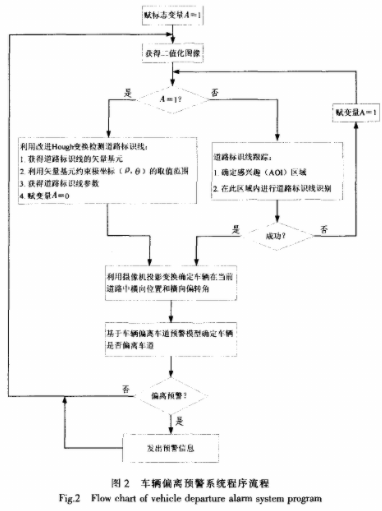
系統首先接收圖像傳感器傳送過來的圖像,將彩色圖像轉化為待處理的灰度圖像,利用中值濾波、Sobel算子邊緣檢測、自適應閾值分割等圖象處理的方法,消除噪聲并平滑圖像,經過邊緣檢測和圖像分割獲得二值化圖像。在二值化圖像和灰度圖像基礎上根據攝像機標定參數,通過模式識別對道路及道路標識線進行辨認,確定道路標線在整幅圖像中的直線方程及本車在道路中的位置。依據車道偏離預警模型檢查車輛是否在車道中正常行駛,是否偏離車道,并根據判斷結果發出預警信息。軟件流程圖如圖2所示。
3.3 預警實驗
實驗車輛選用五菱之光6400C3加長版微型車,在高速公路及城市道路等結構化道路上進行道路標識線識別及車輛偏離預警試驗。系統能夠可靠地識別道路標識線,滿足后續處理的需要,當車輛偏離車道時,該系統能夠準確及時預警。例如系統某次報警發生時刻,車輛距道路標線距離為406 mm,橫向偏轉角為14.0°±2°,車速為85 km/h。
4 結束語
該設計是以嵌入式系統為平臺,以圖像傳感器獲取的道路信息為基礎,提出基于車輛橫向位置與橫向分速度的車輛偏離車道預警模型,并進行了實驗驗證。實驗表明,該方法能夠準確分析車輛在車道中的位置信息,正確判斷車輛的行駛狀態,當車輛偏離車道時及時給予報警。
責任編輯:gt
-
處理器
+關注
關注
68文章
20258瀏覽量
252538 -
dsp
+關注
關注
561文章
8248瀏覽量
366795 -
Linux
+關注
關注
88文章
11767瀏覽量
219105
發布評論請先 登錄

電纜故障定位預警系統實現故障定位的核心原理
化工廠液體泄漏識別預警系統

雷電預警系統探頭轉子的快慢對性能有影響嗎?

監測預警系統:數據智能驅動的風險管控平臺


安全監測預警系統的核心價值?


在線智能雷電預警系統的多場景應用部署方案
實時監測雷電預警系統的行業應用解決方案



 工商網監
工商網監
評論