 KUKA機器人標準程序練習堆垛和卸垛
KUKA機器人標準程序練習堆垛和卸垛

堆垛和卸垛練習:
PTP fa2 Vel=100 % PDAT3 Tool[1]:1 Base[10]:g
for n=1 to 4 計算出16個點的位置值
for m=1 to 4
tp1[n,m]=xfa1 提取放件位置的數據
tp2[n,m]=xfa1 提取預放件位置的數據
tp1[n,m].y=tp1[n,m].y+80*(n-1)
tp1[n,m].x=tp1[n,m].x+65*(m-1)
tp2[n,m].z=tp2[n,m].z+100 預放件位置的Z軸方向要抬高100mm
tp2[n,m].y=tp2[n,m].y+80*(n-1)
tp2[n,m].x=tp2[n,m].x+65*(m-1)
endfor
endfor
PTP fa3 Vel=20 % PDAT4 Tool[1]:1 Base[10]:g
for n=1 to 4
for m=1 to 4
zhua() 循環執行抓件程序
PTP fa4 Vel=10 % PDAT5 Tool[1]:1 Base[10]:g
ptp tp2[n,m] 運行到預放件位置
wait sec 0.5
lin tp1[n,m] 運行到放件位置
wait sec 0.2
SET GRIPPER State= GDAT1 打開夾爪
lin tp1[n,m]
ptp tp2[n,m] 運行到抬起位置
endfor
endfor
PTP P1 Vel=50 % PDAT1 Tool[1]:1 Base[10]:g
編輯:jq
-
標準
+關注
關注
0文章
173瀏覽量
69559 -
KUKA機器人
+關注
關注
4文章
144瀏覽量
10074
原文標題:KUKA機器人標準程序堆垛和卸垛練習
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
機器人拆碼垛中高精度放置與垛型構建的解析分析:技術路徑與核心要素
EtherCAT轉PROFINET網關:助力KUKA機器人實現“焊”裝自由!
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
小蘿卜機器人的故事
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
工業機器人的特點
機器人測試:從虛擬到現實,機器人如何才能變成真正的打工牛馬?


盤點#機器人開發平臺
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
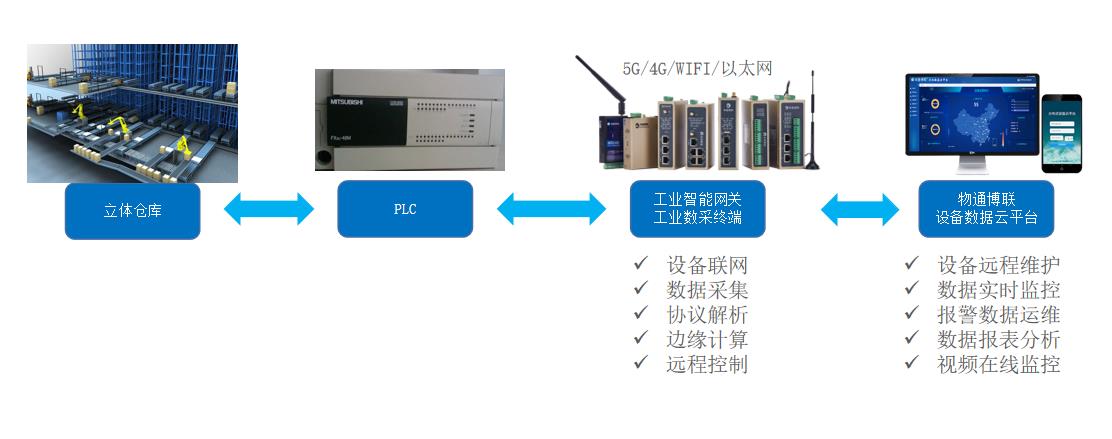
堆垛機器人數據采集物聯網解決方案



 工商網監
工商網監
評論