") 由加壓空氣驅(qū)動的柔性機器人成功問世
由加壓空氣驅(qū)動的柔性機器人成功問世

加州大學(xué)圣地亞哥分校的一個工程實驗室近日開發(fā)了由加壓空氣驅(qū)動的柔性機器人,可以在沒有任何電子設(shè)備的情況下移動。該團隊設(shè)計的柔性機器人可以完全通過氣動電路進行控制。這些由一個圓柱形的腔室系統(tǒng)組成四條腿,它們與振蕩閥一起工作,允許加壓空氣按一定順序進出。
目前柔性機器人的核心就是充氣組件和氣壓,既可以像獵豹那樣快速奔跑,也可以充當(dāng)充氣抓手進行精細化操作。但這些解決方案大多需要電子電路、泵和電源才能發(fā)揮作用,從而推高了最終產(chǎn)品的成本和復(fù)雜性。
該團隊設(shè)計的這種柔性機器人完全沒有電子電路,而是通過氣壓來彎曲腿部,每個腿部有三個運動度,當(dāng)按照正確的順序進行時,機器人能夠在地板上移動。團隊設(shè)計了氣動控制電路,以產(chǎn)生受側(cè)頸龜啟發(fā)的行走步態(tài),還在機器人身體延伸出的吊桿末端以微小氣泡的形式內(nèi)置了傳感器。這意味著,當(dāng)機器人遇到障礙物時,氣泡會變得凹陷,打開一個閥門,讓機器人向相反的方向移動。
論文第一作者 Dylan Drotman 表示:“這項工作代表著向全自動、無電子裝置的行走機器人邁出了基礎(chǔ)而又重要的一步”。研究人員表示除了兒童玩具之外,該柔性機器人技術(shù)還可以應(yīng)用于礦井和核磁共振成像機等領(lǐng)域。該團隊還希望在這項研究的基礎(chǔ)上,開發(fā)出能在更粗糙的地形和更復(fù)雜的障礙物中航行的機器人版本。
責(zé)編AJX
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器人
+關(guān)注
關(guān)注
213文章
31092瀏覽量
222350 -
柔性
+關(guān)注
關(guān)注
0文章
73瀏覽量
15253
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
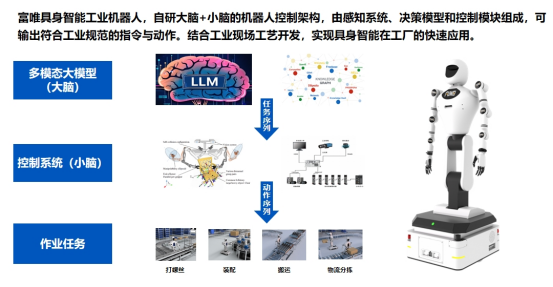
破解柔性生產(chǎn)難題:知識驅(qū)動具身智能工業(yè)機器人的實戰(zhàn)應(yīng)用指南
在工業(yè)4.0邁向工業(yè)5.0的進程中,傳統(tǒng)的“固定編程”機器人已無法滿足多品種、小批量、高柔性的生產(chǎn)需求。隨著人工智能與大模型技術(shù)的爆發(fā),具身智能(Embodied Intelligence) 成為

再談低溫?zé)Y(jié)銀的應(yīng)用:從春晚四家機器人出鏡的幕后推手說起
再談低溫?zé)Y(jié)銀的應(yīng)用:從春晚四家機器人出鏡的幕后推手說起
2026年馬年春晚四家機器人公司:宇樹、魔法原子、銀河通用、松延動力的高動態(tài)、高精度、高可靠表現(xiàn),背后離不開低溫?zé)Y(jié)銀在電機驅(qū)動、傳感器
發(fā)表于 02-17 14:07
探索RISC-V在機器人領(lǐng)域的潛力
Pro則運行控制節(jié)點,通過Wi-Fi網(wǎng)絡(luò)接收Gazebo發(fā)布的傳感器信息(如激光雷達數(shù)據(jù)),并發(fā)布控制指令(速度指令)來驅(qū)動機器人模型移動和避障。
? 體驗: MUSE Pi Pro的K1 CPU在處理
發(fā)表于 12-03 14:40
繩子驅(qū)動的機器人,會是未來嗎?
1X Technologies推出的NEO家庭服務(wù)機器人,宣傳視頻中顯示它的關(guān)節(jié)驅(qū)動中用到非常多的“繩索”。 ? ? 圖源:1X Technologies 繩驅(qū)柔性驅(qū)動的特性,讓其在人

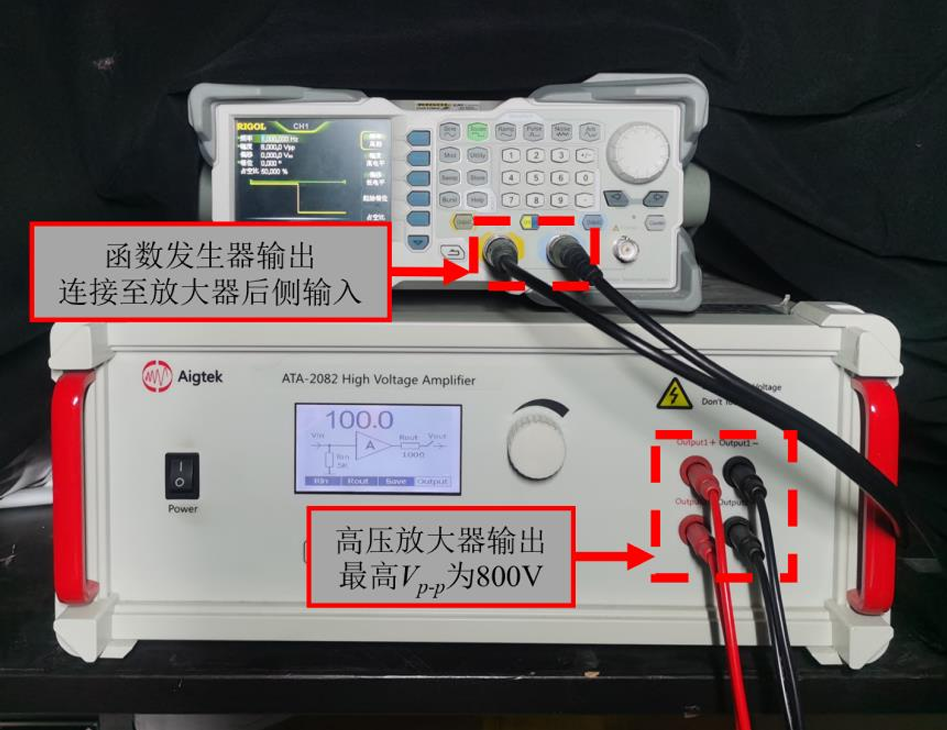
高壓放大器在機器人攀爬速度測試實驗中的應(yīng)用
實驗名稱: 機器人攀爬速度測試實驗 研究方向: 機器人創(chuàng)新攀爬機制、柔性驅(qū)動與機身設(shè)計、精密制造工藝開發(fā) 實驗?zāi)康模?本實驗是對制造出的柔性
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
瑞芯微RK3576 AIoT處理器處理器憑借其卓越的多屏異顯與8路攝像頭接入能力,為機器人領(lǐng)域帶來革新。米爾電子MYD-LR3576開發(fā)板實測數(shù)據(jù)顯示,在高負載下CPU占用僅34%,完美實現(xiàn)多路視覺
發(fā)表于 10-29 16:41
小蘿卜機器人的故事
經(jīng)過我的申請,
馬老師發(fā)放了,
小蘿卜機器人的,
開發(fā)權(quán)限,
原來的小蘿卜公司,
因為經(jīng)營不善倒閉,
作為科研產(chǎn)品,
幾個技術(shù)對此惋惜,
自掏腰包,
要讓小蘿卜機器人,
再生,
每次聽到小蘿卜說
發(fā)表于 10-23 05:24
人形機器人重復(fù)定位精度:工業(yè)柔性制造的“定海神針”
人形機器人重復(fù)定位精度已不再是一個孤立的性能參數(shù),而是集成感知、決策、控制與仿真的系統(tǒng)級能力體現(xiàn)。隨著工業(yè)場景對柔性制造的需求日益提升,高重復(fù)定位精度將成為人形機器人真正賦能“無人化車間”的核心競爭力——它不僅決定了
機器人競技幕后:磁傳感器芯片激活 “精準(zhǔn)感知力”
故障率從 15% 降至 3% 以下。隨著磁隧道結(jié) (MTJ) 等新型技術(shù)成熟,下一代磁傳感器有望實現(xiàn)納米級精度、皮秒級響應(yīng)速度,或使機器人 “高速競速” 最高速度提升 40%;柔性磁傳感器研發(fā)也將讓
發(fā)表于 08-26 10:02
工業(yè)機器人的特點
的基礎(chǔ),也是三者的實現(xiàn)終端,智能制造裝備產(chǎn)業(yè)包括高檔數(shù)控機床、工業(yè)機器人、自動化成套生產(chǎn)線、精密儀器儀表、智能傳感器、汽車自動化焊接線、柔性自動化生產(chǎn)線、智能農(nóng)機、3D 打印機等領(lǐng)域。而智能制造裝備中工業(yè)
發(fā)表于 07-26 11:22
高壓放大器在軟體機器人研究中的應(yīng)用
關(guān)鍵角色,為軟體機器人的驅(qū)動和控制提供了強大的支持。 圖:高壓放大器在介電彈性體制成的軟機器人研究中的應(yīng)用 二、高壓放大器在軟體機器人中的作用 (一)

輪式移動機器人電機驅(qū)動系統(tǒng)的研究與開發(fā)
【摘 要】以嵌入式運動控制體系為基礎(chǔ),以移動機器人為研究對象,結(jié)合三輪結(jié)構(gòu)輪式移動機器人,對二輪差速驅(qū)動轉(zhuǎn)向自主移動機器人運動學(xué)和動力學(xué)空間模型進行了分析和計算,研究和設(shè)計了自主移動
發(fā)表于 06-11 14:30
腦機接口柔性微電極植入機器人問世
中國科學(xué)院自動化研究所傳來好消息;該所科研團隊成功研發(fā)腦機接口柔性微電極植入機器人CyberSense。 據(jù)悉,CyberSense機器人具備自動化程度高、可植入數(shù)量多、空間定位準(zhǔn)、時
盤點#機器人開發(fā)平臺
地瓜機器人RDK X5開發(fā)套件地瓜機器人RDK X5開發(fā)套件產(chǎn)品介紹 旭日5芯片10TOPs算力-電子發(fā)燒友網(wǎng)機器人開發(fā)套件 Kria KR260機器人開發(fā)套件 Kria KR260-
發(fā)表于 05-13 15:02
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】機器人入門的引路書
的非常好的,特別是一些流程圖,很清晰的闡釋了概念
很適合作為初學(xué)者入門的引路書
還能了解很多技術(shù)和框架,破除初學(xué)者的自負困境,讓初學(xué)者知道功能是由很多開發(fā)者維護的,前人已經(jīng)為各種產(chǎn)品搭建了完善的框架。避免陷入得一個人單打獨斗的錯覺
一直蠢蠢欲動ros2和
發(fā)表于 04-30 01:05



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論