") 能勾勒出任何圖像輪廓的四軸機(jī)械臂設(shè)計(jì)方案
能勾勒出任何圖像輪廓的四軸機(jī)械臂設(shè)計(jì)方案

Roboartist是一個(gè)四軸的機(jī)械臂,可以使用Edgestract(我們定制的邊緣檢測(cè)算法),使用鋼筆/鉛筆在A3紙上勾勒出任何圖像的輪廓。該項(xiàng)目依靠核心引擎從上傳的圖像中提取邊緣進(jìn)行處理。Arduino Mega通過USB /藍(lán)牙端口使用從MATLAB發(fā)送的信息來控制伺服器。
硬件
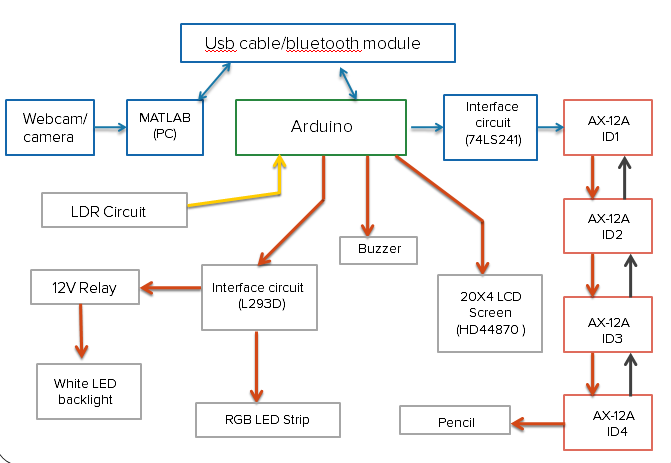
硬件的基本布局如上所述。圖像采集是通過網(wǎng)絡(luò)攝像頭或照相機(jī)實(shí)現(xiàn)的。我們還允許掃描現(xiàn)有的JPEG。盡管并非必須要使用RGB LED燈條和LCD屏幕,但我們只是出于娛樂目的而將其投入使用。真正改善產(chǎn)品設(shè)計(jì)的是由LED燈條構(gòu)成的白色LED背光燈。光線透過紙張擴(kuò)散,為Roboartist的演奏提供了良好的光環(huán)。
軟件
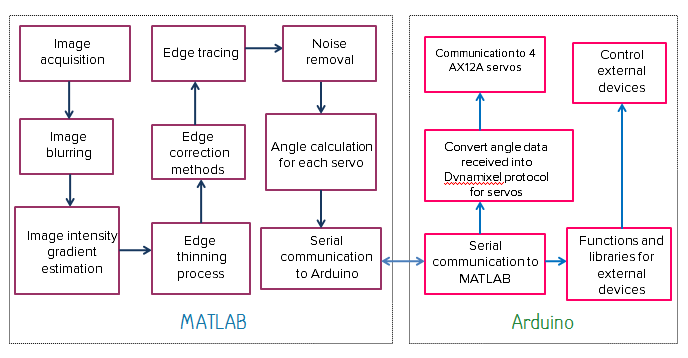
這是軟件的結(jié)構(gòu)。基本思想是讓MATLAB承擔(dān)所有繁重的工作,而讓Arduino專注于揮舞鉛筆。該程序要求用戶控制一些參數(shù)以消除噪聲并獲得良好的邊緣輸出。完成后,程序?qū)⑴cArduino通信。
快速瀏覽涉及的圖像處理階段:
每個(gè)切片都來自一系列連續(xù)的DIP階段。最初我們一直使用Canny邊緣檢測(cè)算法,但是現(xiàn)在我們已經(jīng)構(gòu)建并切換到Edgestract(一種更優(yōu)化的繪圖算法)。我們一直在對(duì)各種類型的圖像運(yùn)行該算法并記錄結(jié)果。
責(zé)任編輯:xj
原文標(biāo)題:能勾勒出任何圖像輪廓的四軸機(jī)械臂
文章出處:【微信公眾號(hào):電路設(shè)計(jì)技能】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
-
機(jī)械臂
+關(guān)注
關(guān)注
14文章
596瀏覽量
26134 -
四軸
+關(guān)注
關(guān)注
0文章
40瀏覽量
13848
原文標(biāo)題:能勾勒出任何圖像輪廓的四軸機(jī)械臂
文章出處:【微信號(hào):cirmall,微信公眾號(hào):電路設(shè)計(jì)技能】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
射頻RFID+機(jī)械臂:工業(yè)零部件加工后智能分揀
告別圍欄時(shí)代!激光雷達(dá)讓機(jī)械臂產(chǎn)線“智能守衛(wèi)”效率飆升

復(fù)合機(jī)器人對(duì)比傳統(tǒng)AGV和機(jī)械臂的優(yōu)勢(shì)何在?

四軸無人機(jī)是如何工作的?

3C 電子 / 汽車 / 物流與新零售:協(xié)作機(jī)械臂的三大行業(yè)落地范式

傳統(tǒng)測(cè)試設(shè)備的局限與協(xié)作機(jī)械臂的破局

機(jī)器人機(jī)械臂效率提升的革命性解決方案:上海永銘電容器實(shí)踐

協(xié)作機(jī)械臂產(chǎn)品介紹
極海G32R501工業(yè)六軸機(jī)械臂參考方案釋放工業(yè)4.0產(chǎn)業(yè)價(jià)值

GZCOM-NET:為機(jī)械臂測(cè)試帶來高效無線解決方案!

大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開源六軸機(jī)械臂產(chǎn)品




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論