") 選擇微型機器人電機時需要考慮的事項有哪些
選擇微型機器人電機時需要考慮的事項有哪些

在微型機器人行業(yè)中,微型電機的應用非常多,如:手指關節(jié)、臉部、機械臂,都是通過舵機連接微型電機來進行各種動作。常見的幾種電機有無刷電機、有刷電機、超聲波電機、同步電機、步進電機,其中超聲電機應用的較多。那么選擇微型機器人電機需要考慮什么。
1、物理參數(shù):微型電機的尺寸、軸尺寸等
2、其他參數(shù):微型電機的減速箱參數(shù)等
3、工作電壓:微型電機會存在多個電壓參數(shù),最常用的為額定電壓,有的微型電機可以在超過額定電壓運行一段時間,但是不可以長時間運行,不然還是會發(fā)熱燒毀;
4、電流:微型電機有額定電流、空載電流和堵轉電流參數(shù);
5、轉速:微型電機每分鐘的旋轉速度;
6、轉矩:微型電機旋轉時候的扭力;
fqj
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
電機
+關注
關注
143文章
9592瀏覽量
154088 -
微型機器人
+關注
關注
0文章
112瀏覽量
20207
發(fā)布評論請先 登錄
相關推薦
熱點推薦
起源于諾貝爾物理學獎得主,納米機器人再突破!
電子發(fā)燒友網(wǎng)報道(文/李彎彎)納米機器人是指體積在納米級別(1-100納米)的微型機器人,其研制屬于分子仿生學的范疇。這一概念最早由諾貝爾物理學獎得主理查德·費曼在1959年提出,他在《微觀世界有無
再談低溫燒結銀的應用:從春晚四家機器人出鏡的幕后推手說起
再談低溫燒結銀的應用:從春晚四家機器人出鏡的幕后推手說起
2026年馬年春晚四家機器人公司:宇樹、魔法原子、銀河通用、松延動力的高動態(tài)、高精度、高可靠表現(xiàn),背后離不開低溫燒結銀在電機驅動、傳感器
發(fā)表于 02-17 14:07
中國科學院研發(fā)3D手型微納機器人
微納機器人是工作在微米至納米尺度的“智能微型機器”,在精準醫(yī)療、環(huán)境修復等領域應用前景廣闊。然而,當前微納機器人多采用單一材料體系,功能擴展受限,復雜環(huán)境下的多刺激協(xié)同控制與多步操作成為科研挑戰(zhàn)。為此,科研團隊提出新思路,采用多
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
,已經(jīng)成為機器人開發(fā)者不容忽視的核心處理器。而米爾電子的MYD-LR3576開發(fā)板,則以其豐富的接口、穩(wěn)定的性能和成熟的軟硬件支持,為快速原型驗證和產(chǎn)品開發(fā)提供了絕佳的平臺。如果您正在尋找一款能夠同時處理復雜視覺任務和豐富交互界面的機器人主控方案,RK3576無疑是當前最
發(fā)表于 10-29 16:41
小蘿卜機器人的故事
代替,
LED,
有大佬感興趣,
一起關注和討論代碼,
這個機器人知名度不高,
可是是機器人的原型,
如果開放接口,
定位和無線充電,
也不失為未來的禮物。
讓我們?yōu)樾√}卜工程師的,
自掏腰包救蘿卜
發(fā)表于 10-23 05:24
自制巡線解迷宮機器人(上)
,考慮到機器人總裝之后的負載情況以及自己對機器人巡線速度的需求,我最終購買的N20電機減速比為30:1,且額定電壓為6V時,其空載轉速為300RPM(即每分鐘300轉),這樣就能保證動
發(fā)表于 10-20 10:39
機器人 VFD 電纜選型時的運動性能考量
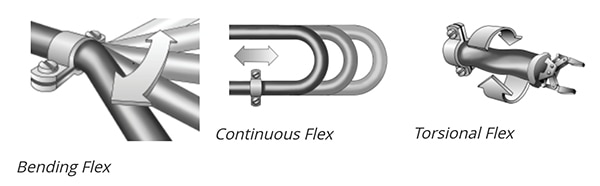
作者:Jeff Shepard 投稿人:DigiKey 北美編輯 為工業(yè)機器人選擇變頻驅動器 (VFD) 電纜時,必須考慮幾個關鍵因素才能確保獲得最小的解決方案規(guī)格和最高的可靠性。沒有萬能的解決方案
人形機器人關節(jié)電機:永磁電機類型解析
機器人的運動方式、負載要求和精度需求來選擇。其中永磁電機憑借其高功率密度、精準控制和輕量化特性,已成為人形機器人關節(jié)驅動的核心動力源。永磁電機

工業(yè)機器人的特點
的基礎,也是三者的實現(xiàn)終端,智能制造裝備產(chǎn)業(yè)包括高檔數(shù)控機床、工業(yè)機器人、自動化成套生產(chǎn)線、精密儀器儀表、智能傳感器、汽車自動化焊接線、柔性自動化生產(chǎn)線、智能農(nóng)機、3D 打印機等領域。而智能制造裝備中工業(yè)
發(fā)表于 07-26 11:22
輪式移動機器人電機驅動系統(tǒng)的研究與開發(fā)
【摘 要】以嵌入式運動控制體系為基礎,以移動機器人為研究對象,結合三輪結構輪式移動機器人,對二輪差速驅動轉向自主移動機器人運動學和動力學空間模型進行了分析和計算,研究和設計了自主移動機器人
發(fā)表于 06-11 14:30
盤點#機器人開發(fā)平臺
地瓜機器人RDK X5開發(fā)套件地瓜機器人RDK X5開發(fā)套件產(chǎn)品介紹 旭日5芯片10TOPs算力-電子發(fā)燒友網(wǎng)機器人開發(fā)套件 Kria KR260機器人開發(fā)套件 Kria KR260-
發(fā)表于 05-13 15:02
詳細介紹機場智能指路機器人的工作原理
路徑。路徑規(guī)劃算法會考慮多種因素,如距離最短、避開人流密集區(qū)域、優(yōu)先選擇寬闊通道等,以確保旅客能夠快速、順暢地到達目的地。
實時導航與避障 :在機器人引導旅客的過程中,導航系統(tǒng)會實時監(jiān)控機器人
發(fā)表于 05-10 18:26
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】機器人入門的引路書
的非常好的,特別是一些流程圖,很清晰的闡釋了概念
很適合作為初學者入門的引路書
還能了解很多技術和框架,破除初學者的自負困境,讓初學者知道功能是由很多開發(fā)者維護的,前人已經(jīng)為各種產(chǎn)品搭建了完善的框架。避免陷入得一個人單打獨斗的錯覺
一直蠢蠢欲動ros2和機器人的同學,
發(fā)表于 04-30 01:05
一個人形機器人需要近50臺電機,人形機器人成本高的原因在哪里
人形機器人中,大電機(100~150瓦)約占機器人用的電機總值的25%,中大型電機(50~100瓦)約占



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論