 KUKAC4大眾版機器人報"伺服焊鉗的滯后故障分析"如何解決
KUKAC4大眾版機器人報"伺服焊鉗的滯后故障分析"如何解決

我們經常出現拉拽故障:
SWITCH $SoftPlcint[21] 軟PLC反饋產生提示信息:
CASE 1
USER_MSG.MSG_TXT[]="SZ1 SchleppfehlerimProgrammbetrieb, Quittierung in Single-Step erforderlich !"–拉拽故障需要單步復位-
. . . . . .在出現焊鉗不控制,切超出拉拽監控最大值時,會觸發軌跡停止.
IF NOT $OUT[O_SZ1_FRG] AND (abs($softplcreal[1])>max_sf) AND ($softplcint[1]>0)THEN
-!A715 焊鉗在7軸模式-$softplcint[1]=7 伺服焊鉗-max_sf=15
-$softplcreal[1]實際由軟PLC偏差距離反饋
-$softplcreal[20]=max_sf將最大偏差值傳輸給軟PLC
-$softplcint[1]=附加軸與驅動裝置接口1配置值,例如:伺服焊鉗=7
BRAKE-如果出現上述故障立即中斷移動的軌跡
sf_prog_status :拉拽故障的反饋變量監控狀態。
# PRG_MOTION:程序運行中出現的滯后誤差
# driveoff_motion:驅動裝置關斷時的滯后誤差
# man_motion:用運行建運行驅動裝置時的滯后誤差
# dest_invalid:由于目標位置無效導致的滯后誤差
# user_act:操作確認鍵時的滯后誤差
# SZ_IO: 無滯后誤差
滯后誤差監控
機器人報滯后故障實際上是SynchroMove軟件的一種監控!
如果機器人控制系統有定位權,則應對外部驅動裝置進行位置監控.
允許的滯后誤差極限可通過變量”MAX _SF ”(VW_USR_S.dat)配置。預先設定的滯后誤差極限為15mm。超出滯后誤差極限會導致機器人停機。在確認和消除滯后誤差后,可繼續機器人程序。針對滯后誤差可監控,可設置一個延遲時間。
變量“SYSBUSDELAY []”(vw_usr_s.dat).延遲時間單位為[12ms]。
延遲時間不得大于19*[12ms],小于1*[12ms]。
自動計算延遲時間(VW_EMZ)
執行EMZ的條件:
1.正確設定機器人控制系統上外部驅動裝置的軟限位開關
2.切換至用戶組”專家”
3.運行方式T2
4.程序倍率100%
5.在文件夾VW_USER中選擇模塊”VW_EMZ”
6.選擇驅動裝置接口
7.執行程序

執行后提示:
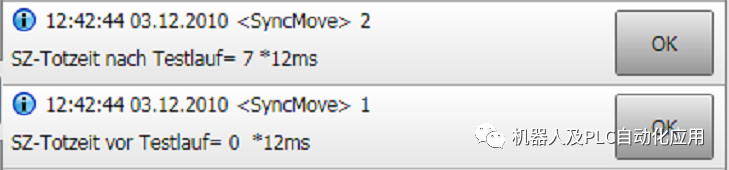
通過測試運行得出延遲時間,被自動應用.
從上述介紹中我們可以看出,所謂的拉拽或者滯后,起因都是機器人外部軸E1移動過程中,焊鉗的氣缸移動速度慢了,跟不上機器人軟PLC的監控時間從而產生的故障。
那么我們結合程序的分析,從硬件上去看延遲滯后誤差故障。
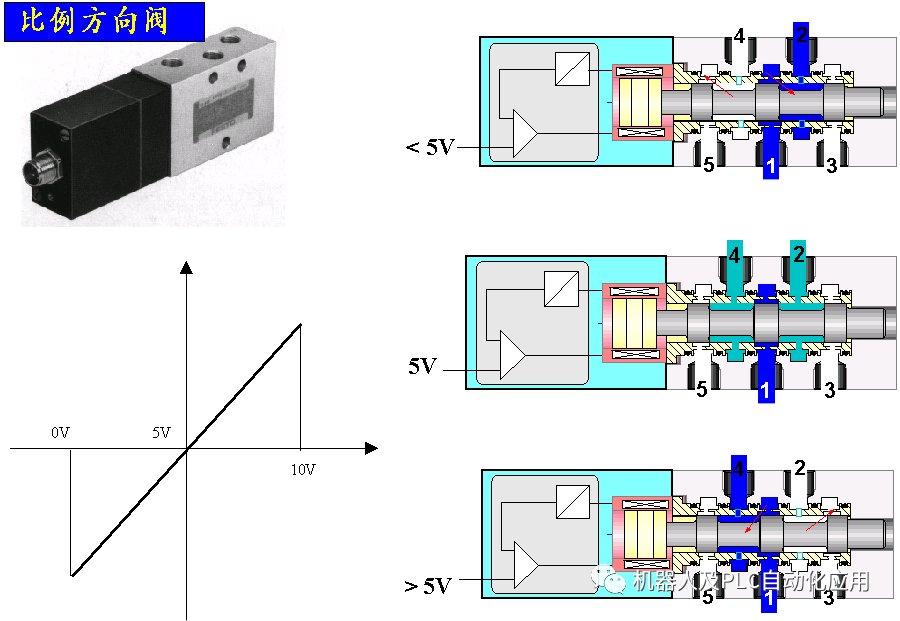
1.伺服焊鉗控制器或MPVE故障。
MPYE為比例方向閥,利用比例控制技術,閥口開度可連續變化。可以實現方向控制和流量控制,控制主氣缸的方向和速度。
2.焊鉗氣缸故障,滑道卡。

3.短暫的更改參數能消除由于閥體或氣缸老化引起的一些延遲,但難以掩蓋故障的本身。還是要更換部件的。
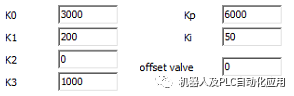
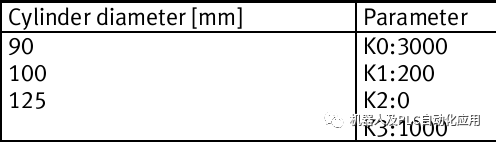
C型槍的典型設定值:
X型槍的典型設定值:
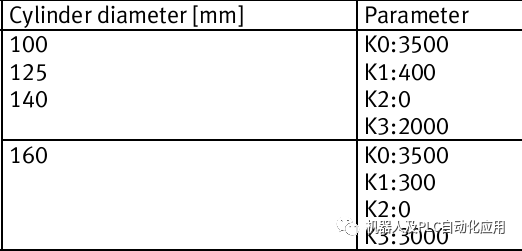
K0是調節速度的,K3是抑制波動的;通過這兩個參數,基本上就可以調到滿意的特性;
K1不是用來修改速度的,而是用來抑制超調的,同時,會略微增加定位時間
K1和K3都有一定的減小靜差的作用
K2的作用不明顯,增加加速度緩沖K2以補償摩擦效果。
如果噴槍在到達目標位置或緩慢移動時趨于振動,請增加對壓力變化K3的緩沖。
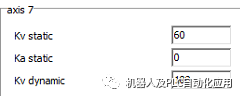
Kv static用來調節速度
Kv dynamic用來消除動態跟蹤誤差。
因此從上述的原因,我們可以得出,一旦出現了拉拽故障,這就是告訴我們,焊鉗的閥或者氣缸,或者導向滑軌出現的老化,泄露,磨損等問題,最好的方法就是更換,備件,或是及時保養。
責任編輯:xj
原文標題:KUKAC4 大眾版機器人報"伺服焊鉗的滯后故障分析"
文章出處:【微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
-
機器人
+關注
關注
213文章
31079瀏覽量
222259 -
伺服
+關注
關注
17文章
693瀏覽量
43339 -
KUKA
+關注
關注
3文章
218瀏覽量
17474
原文標題:KUKAC4 大眾版機器人報"伺服焊鉗的滯后故障分析"
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
從"替代人力"到"智能協同":履帶式巡檢機器人的產業躍遷
選EtherCAT模塊,別只看價格,先看"體檢報告"

機械臂越復雜越&amp;quot;卡頓&amp;quot;?別讓控制器拖了后腿
ZM82:一顆國產模組,如何讓傳統路燈變&amp;quot;聰明&amp;quot;?
Vishay Vitramon Touch &quot;N&quot; Tune? MLCC套件技術分析
&quot;Access violation&quot; 錯誤,復位位置,重新打印
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
船舶變頻系統頻故障?移相整流變壓器的&amp;quot;相位魔法&amp;quot;揭秘

明治科普 | 讓機器人擁有&amp;quot;觸感&amp;quot;:電子皮膚如何實現?

智慧路燈的&amp;quot;智慧&amp;quot;從何而來?一文讀懂單燈控制器工作原理

精密設備的&amp;quot;電力保鏢&amp;quot;:優比施UPS如何守護數據與硬件安全?

為什么GNSS/INS組合被譽為導航界的&amp;quot;黃金搭檔&amp;quot;?

人形機器人為什么要定制? ——揭秘工業場景的&quot;千面需求&quot;
倉儲界的&quot;速效救心丸&quot;,Ethercat轉PROFINET網關實戰案例

電纜局部放電在線監測:守護電網安全的&amp;quot;黑科技&amp;quot;



 工商網監
工商網監
評論