 KUKA機器人的初始化運行稱為BCO運行
KUKA機器人的初始化運行稱為BCO運行

KUKA 機器人的初始化運行稱為 BCO 運行。
BCO 是 B lock coincidence (即程序段重合)的縮寫。重合意為 “ 一致 ” 及 “ 時間 / 空間事件的會合 ”。
在下列情況下要進行 BCO 運行:
? 選擇程序 (例 1)
? 程序復位: 復位 (例 1)
? 程序執行時手動移動 (例 1)
? 更改程序 (例 2)
? 語句行選擇 (例 3)
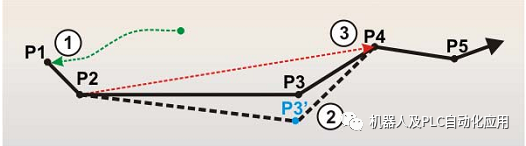
BCO 運行執行舉例
1 選定程序或程序復位后 BCO 運行至原始位置
2 更改了運動指令后執行 BCO 運行 刪除、示教了點后
3 進行了語句行選擇后執行 BCO 運行
BCO 運行的原因 :
為了使當前的機器人位置與機器人程序中的當前點位置保持一致,必須執行 BCO 運行。
僅當當前的機器人位置與編程設定的位置相同時才可進行軌跡規劃。因此,首先必須將 TCP 置于軌跡上。
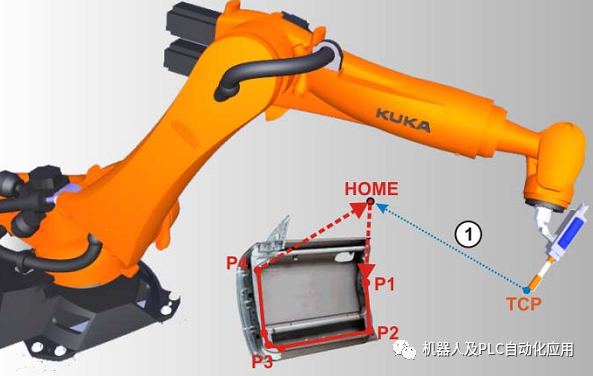
在選擇或者復位程序后 BCO 運行至 Home 位置
相關系統變量
$ON_PATH 在軌跡上
用于監視編程路徑的信號聲明
BCO運行后設置此輸出。因此,機器人控制器會與上級控制器通信,使機器人位于編程路徑上,只有當機器人離開路徑,程序被復位或執行塊選擇時,輸出才再次復位。
VW標準設置 :SIGNAL $ON_PATH $OUT[4040]
$MOVE_BCO
指示當前是否正在執行BCO運行
$MOVE_BCO=State
true:正在進行BCO運行。
false:不進行BCO運行。
責任編輯:lq
-
控制器
+關注
關注
114文章
17791瀏覽量
193170 -
機器人
+關注
關注
213文章
31079瀏覽量
222253 -
程序
+關注
關注
117文章
3846瀏覽量
85240
原文標題:BCO 運行
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
鯨啟智能定制內網大模型機器人投入運行
EtherCAT總線初始化步驟

探索RISC-V在機器人領域的潛力
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
GraniStudio:IO初始化以及IO資源配置例程

GraniStudio:初始化例程




 工商網監
工商網監
評論