 ABB機器人圓形輸送鏈相關參數解釋
ABB機器人圓形輸送鏈相關參數解釋

1. 通常的機器人輸送鏈跟蹤,均為直線輸送鏈跟蹤,例如下圖
2. 有些情況,輸送鏈為圓形,例如文首的圖例。ABB機器人也支持圓形輸送鏈跟蹤。與直線輸送鏈跟蹤相比,配置主要區別為直線跟蹤的單位是“米”,圓形跟蹤的單位是“弧度”。以下參數為圓形輸送鏈相關參數解釋。
參數名舉例
CountsPerMeter40000 counts per radian
At 6 m radius, one count = 0.15 mm
minimum distance 最小跟蹤距離-100 milliradians
At 6 m radius, = -600 mm
Conveyor base frame 輸送鏈基坐標Base frame x = 8.0 m
Base frame y = 0.0 m
Base frame z = 0.0 m
The x-axis is rotated 2.44 rad from the world X (XIRB)Base frame q1 = 0.3420
Base frame q2 = 0.0000
Base frame q3 = 0.0000
Base frame q4 = 0.9397
SyncSeparation0.005 rad
At 6 m radius = 30 mm
QueueTrkDist0.017 rad
At 6 m radius = 100 mm
maximum distance420 milliradians
At 6 m radius = 2520 mm
StartWinWidth0.017 rad
At 6 m radius = 100 mm
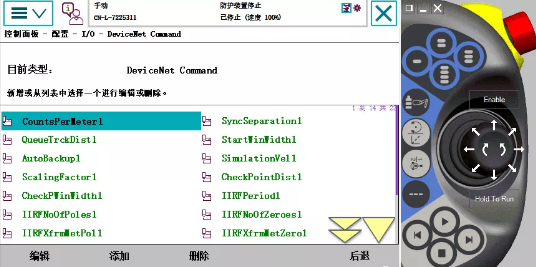
3. 以上參數設置同Linear跟蹤,主要在配置-I/O的DeviceNet Command下
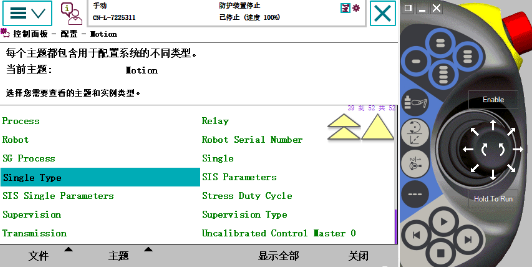
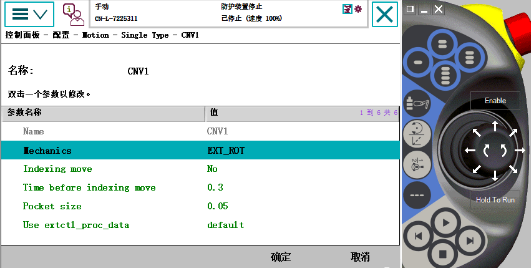
4. 對于圓形跟蹤,需要將配置-主題Motion下的Single Type的Mechanics改為ext_rot
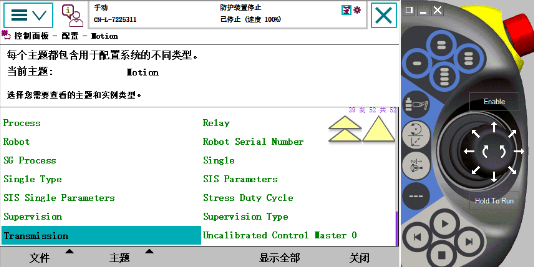
將配置-主題Motion下的Transmission的Rotating Move改為Yes
責任編輯:xj
-
機器人
+關注
關注
213文章
31097瀏覽量
222370 -
ABB
+關注
關注
26文章
572瀏覽量
56762
發布評論請先 登錄
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
小蘿卜機器人的故事
突發!ABB機器人業務易主,軟銀53.75億美元接盤
工業機器人的特點
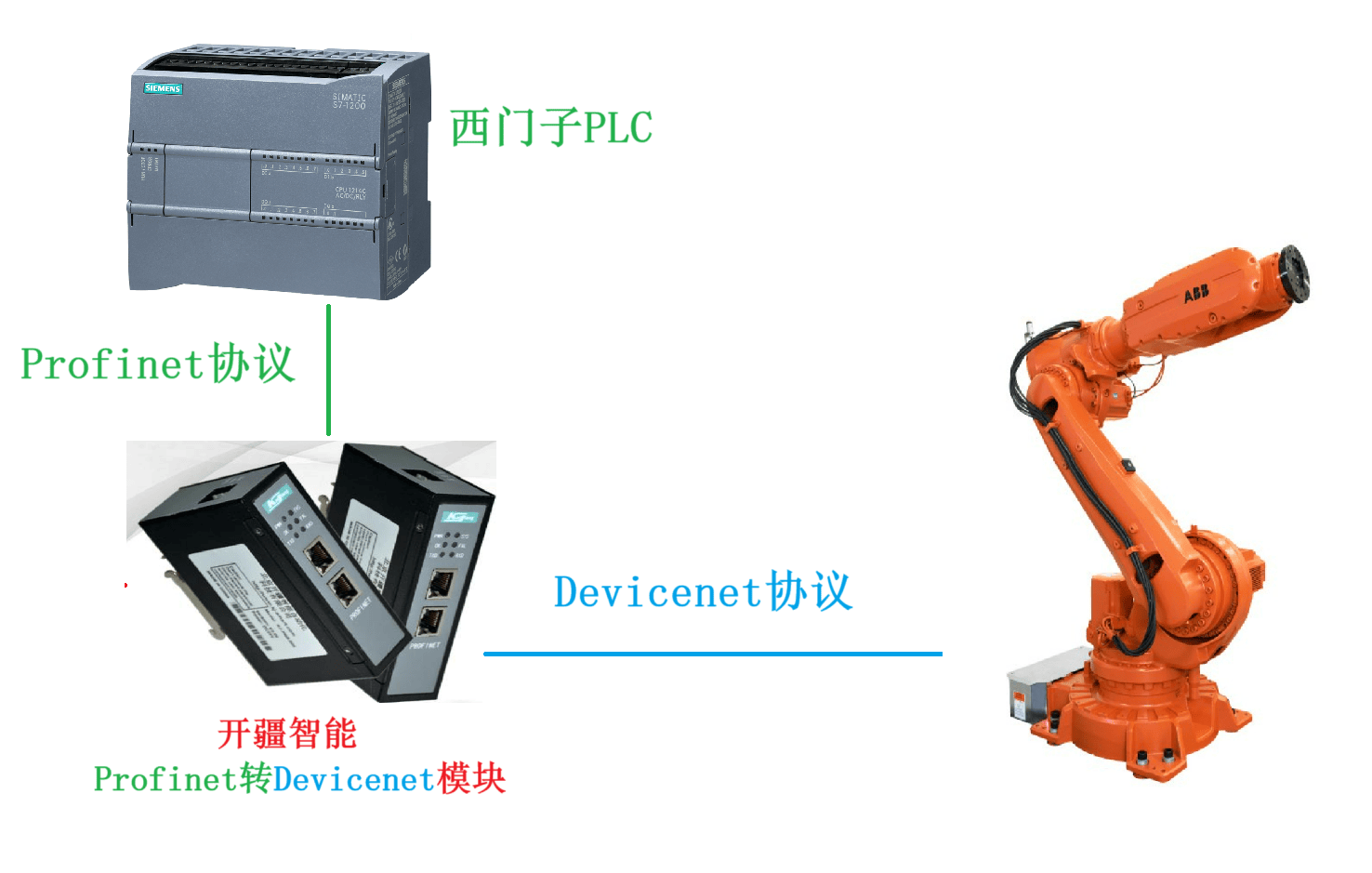
開疆智能Profinet轉Devicenet網關連接ABB機器人配置案例

開疆智能ModbusTCP轉Devicenet網關連接三菱PLC與ABB機器人配置案例

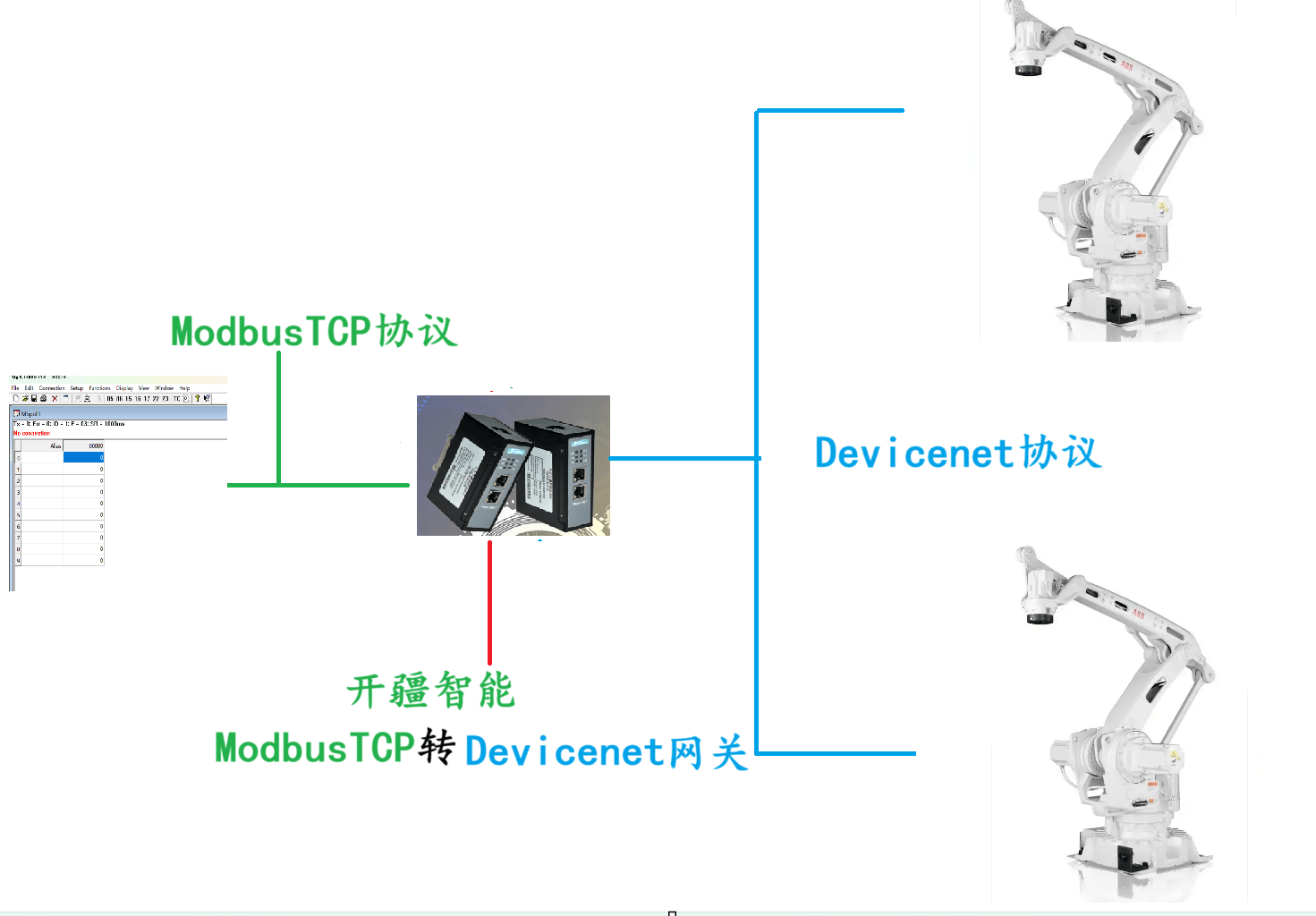
開疆智能ModbusTCP轉Devicenet網關連接ABB機器人配置案例
當機器人遇上“語言障礙”:CCLINKIE轉Profinet的“破冰外掛”來啦\\!
明遠智睿SSD2351開發板:語音機器人領域的變革力量
開疆智能Profient轉ModbusTCP網關連接ABB機器人MODBUS TCP通訊案例




 工商網監
工商網監
評論