 當ABB機器人報“50295/50296 SMB內存差異”的處理辦法
當ABB機器人報“50295/50296 SMB內存差異”的處理辦法

時常在我們更換ABB配件SMB板后,或有時重新刷入系統,會有如題報警提示,這是由于SMB內數據和控制柜內數據不一致導致的,有時大家還會遇到示教器上面提示存機器人系列號與內存數據不一致,這是我們可以去示教器的主菜單——控制面板——配置——Motion——Robot Serial Number——rob_1:Robot Serial Number High Part (對應的機器人型號,在機器人本體上可以看的到),Robot Serial Number Low Part (對應的機器人的序列號,同樣在機器人本體上可以看的到)。下面我們介紹一下故障處理:
當機器人報“50295/50296 SMB內存差異”的處理辦法
一,清楚機器人內部原有內存
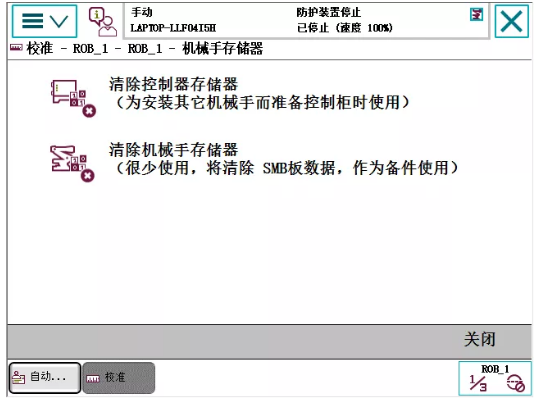
步驟為:ABB主菜單-校準-ROB_1-進入“機械手存儲器”-單擊“高級”,進入下圖所示界面,依次清除控制柜內存和機械手內存(SMB測量電路板)。
二,機器人序列號寫入,以1410-503866為例
步驟為:ABB主菜單-控制面板-配置-主題選擇“Motion”-進入“Robot Serial Number”-rob1,分別在”robot serial number high part”寫入1200,在robot serial number low part”寫入“503866”,配置完成后重啟生效。

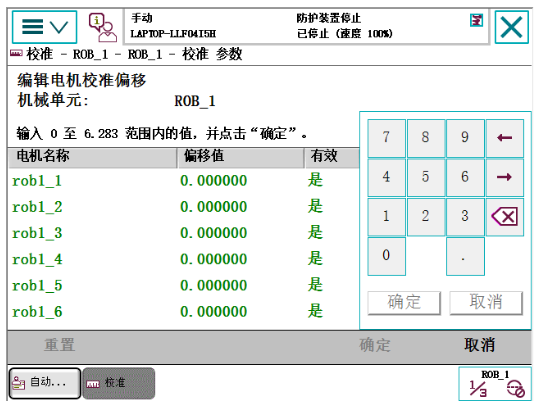
第三步:重新寫入“電機校準偏移”值
步驟為:ABB主菜單-校準-ROB_1-進入“編輯電機校準偏移”,如下圖。分別將機器人手臂后面的標簽上的數值對應寫入示教器,填寫完成后重啟生效。
第四步,同步控制柜內存與SMB內存
步驟一:ABB主菜單-校準-ROB_1-進入“機械手存儲器”-單擊“高級”,清除機械手內存(SMB測量電路板)。
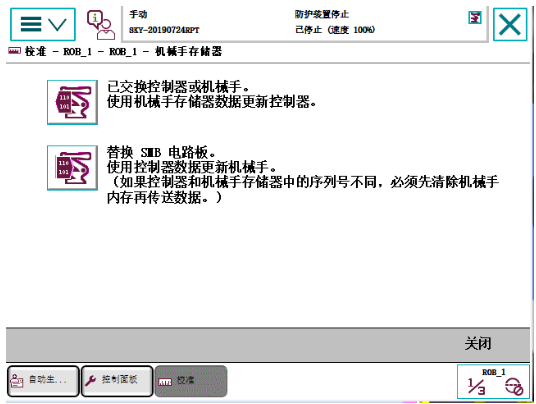
步驟二:ABB主菜單-校準-ROB_1-進入“機械手存儲器”-單擊“更新”,進入下圖,點擊“替換SMB電路板”,然后重啟機器人。
責任編輯:xj
-
機器人
+關注
關注
213文章
31098瀏覽量
222386 -
ABB機器人
+關注
關注
15文章
93瀏覽量
30945 -
SMB
+關注
關注
0文章
46瀏覽量
12124
發布評論請先 登錄
探索RISC-V在機器人領域的潛力
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
小蘿卜機器人的故事
突發!ABB機器人業務易主,軟銀53.75億美元接盤
工業機器人的特點
開疆智能Profinet轉Devicenet網關連接ABB機器人配置案例
開疆智能ModbusTCP轉Devicenet網關連接三菱PLC與ABB機器人配置案例

開疆智能ModbusTCP轉Devicenet網關連接ABB機器人配置案例
工業機器人與協作機器人概念不同

明遠智睿SSD2351開發板:語音機器人領域的變革力量
開疆智能Profient轉ModbusTCP網關連接ABB機器人MODBUS TCP通訊案例




 工商網監
工商網監
評論