 KUKA工業機器人搬運工具操作教程一
KUKA工業機器人搬運工具操作教程一

項目描述:
被搬運工件位于圖卸料區, 機器人末端氣爪從卸料區下端將一個工件夾取, 并將之搬運至圖堆垛區的一個放置點。
任務一:運動規劃和制定程序流程圖
運動規劃
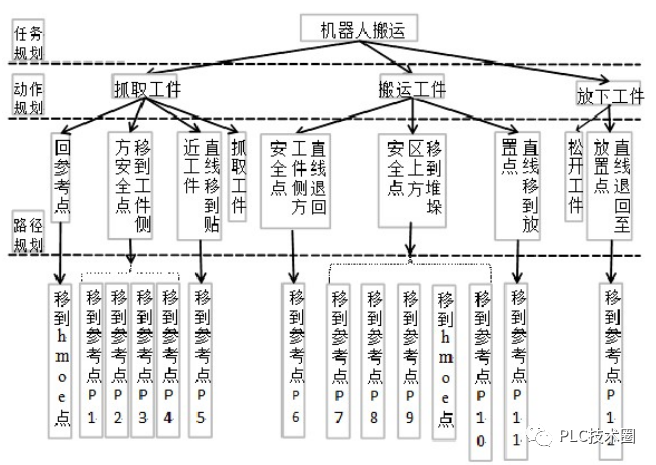
運動軌跡
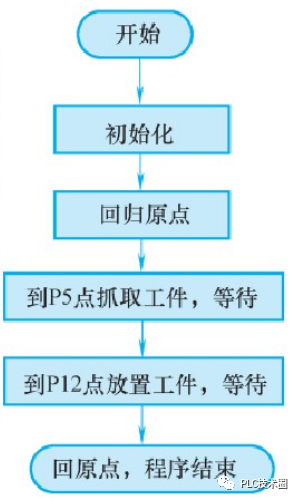
程序流程圖
任務二:示教前準備
(1)參數設置(包含坐標模式、 運動模式、 速度)
在示教器過程中需要在一定的坐標模式、 運動模式和操作速度下手動控制機器人達到一定的位置, 因此在示教運動指令前, 必須選定好坐標模式、 運動模式和速度。
(2) 1/0配置
本任務中使用氣爪來抓取和釋放工件, 氣爪的打開和關閉需要通過1/0接口信號控制, KUKA機器人控制系統提供了1/0通信接口, 本任務采用編號為17的1/0通信接口。
(3)工具坐標系設定
以被搬運工件為對象選取 一個接觸尖點,同時選取氣爪的一個接觸尖點, 測試氣爪的TCP和姿態
(4)基坐標系設定
以堆垛區平臺為對象, 同時選取氣爪一個接觸尖點,測試基坐標系
任務三:新建程序
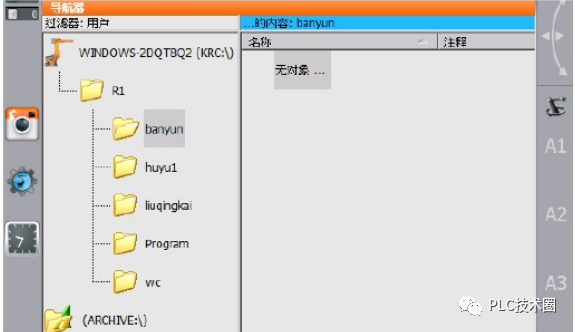
步驟1:點擊R1,選擇R1文件夾, 點擊示教界面左下角【新】軟鍵新建一個文件夾,通過彈出軟鍵盤輸入文件夾名“banyun“點擊示教界面右下角【OK】軟鍵
步驟2:選擇 “ banyun ” 文件夾,點擊示教界面右下角【打開】軟鍵,打開該文件夾
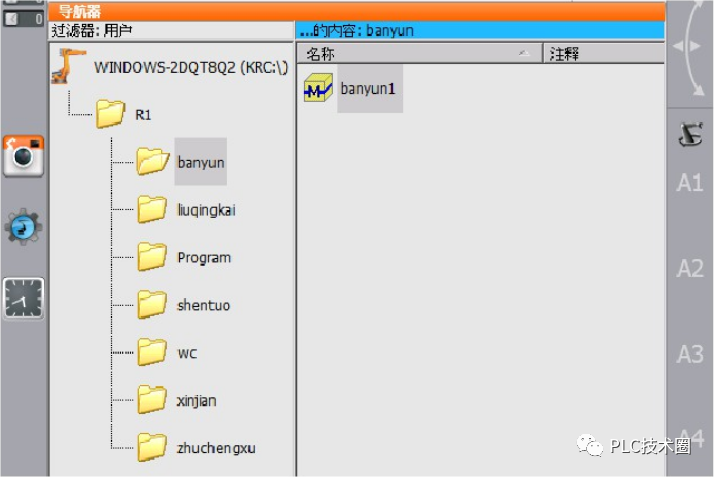
步驟3:點擊示教界面左下角的【新】軟鍵, 通過彈出的軟鍵盤輸入程序名 “ banyun”,點擊示教界面右下角【OK】軟鍵, 信息欄彈出相同程序名的提示信息

步驟4:重做步驟3,將程序名命為“ banyunl”可新建一個程序
待續。。。。。請看下一篇
責任編輯:xj
原文標題:KUKA工業機器人搬運編程與操作(上)
文章出處:【微信公眾號:PLC技術圈】歡迎添加關注!文章轉載請注明出處。
-
編程
+關注
關注
90文章
3716瀏覽量
97190 -
工業機器人
+關注
關注
91文章
3534瀏覽量
98186
原文標題:KUKA工業機器人搬運編程與操作(上)
文章出處:【微信號:xue_PLC,微信公眾號:PLC技術圈】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
解鎖“試管自動抓取搬運”新紀元:富唯智能復合機器人重塑精準物流

【案例分享】電子谷多芯線束賦能高效產線!AGV 搬運機器人穩定連接方案

PFC模塊是電的“高效搬運工
高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
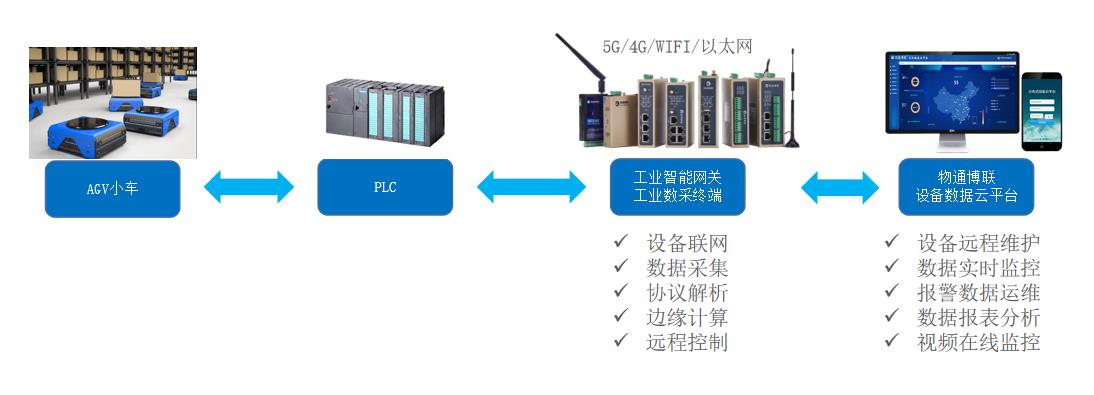
AGV搬運機器人聯網監控系統方案
復合機器人開啟血漿包“零接觸”搬運新時代

工業機器人線束揭秘 | 性能加持助力機器人作業效率穩定躍升
工業機器人與協作機器人概念不同

EtherCAT科普系列(7): EtherCAT技術在工業機器人控制系統領域的應用

AGV搬運機器人耗電量因素



 工商網監
工商網監
評論