 重點講解如何結合RTOS進行處理數據
重點講解如何結合RTOS進行處理數據

我們巧妙的利用了RTSO自帶的消息隊列,我們可以把每一個接收的數據看做一個消息元素。
先回顧一下知識點:
基于 FreeRTOS 的應用程序由一組獨立的任務構成——每個任務都是具有獨立權限的程序。這些獨立的任務之間的通訊與同步一般都是基于操作系統提供的IPC通訊機制,而FreeRTOS 中所有的通信與同步機制都是基于隊列實現的。
消息隊列是一種常用于任務間通信的數據結構,隊列可以在任務與任務間、中斷和任務間傳送信息,實現了任務接收來自其他任務或中斷的不固定長度的消息。任務能夠從隊列里面讀取消息,當隊列中的消息是空時,掛起讀取任務,用戶還可以指定掛起的任務時間;當隊列中有新消息時,掛起的讀取任務被喚醒并處理新消息,消息隊列是一種異步的通信方式。
1.數據存儲
隊列可以保存有限個具有確定長度的數據單元。隊列可以保存的最大單元數目被稱為隊列的“深度”。在隊列創建時需要設定其深度和每個單元的大小。
通常情況下,隊列被作為 FIFO(先進先出)緩沖區使用,即數據由隊列尾寫入,從隊列首讀出。當然,由隊列首寫入也是可能的。
往隊列寫入數據是通過字節拷貝把數據復制存儲到隊列中;從隊列讀出數據使得把隊列中的數據拷貝刪除。
2.讀阻塞
當某個任務試圖讀一個隊列時,其可以指定一個阻塞超時時間。在這段時間中,如果隊列為空,該任務將保持阻塞狀態以等待隊列數據有效。當其它任務或中斷服務例程往其等待的隊列中寫入了數據,該任務將自動由阻塞態轉移為就緒態。當等待的時間超過了指定的阻塞時間,即使隊列中尚無有效數據,任務也會自動從阻塞態轉移為就緒態。
由于隊列可以被多個任務讀取,所以對單個隊列而言,也可能有多個任務處于阻塞狀態以等待隊列數據有效。這種情況下,一旦隊列數據有效,只會有一個任務會被解除阻塞,這個任務就是所有等待任務中優先級最高的任務。而如果所有等待任務的優先級相同,那么被解除阻塞的任務將是等待最久的任務。
說些題外話,ucos中是具有廣播消息的,當有多個任務阻塞在隊列上,當發送消息的時候可以選擇廣播消息,那么這些阻塞的任務都能被解除阻塞。
3.寫阻塞
與讀阻塞想反,任務也可以在寫隊列時指定一個阻塞超時時間。這個時間是當被寫隊列已滿時,任務進入阻塞態以等待隊列空間有效的最長時間。
由于隊列可以被多個任務寫入,所以對單個隊列而言,也可能有多個任務處于阻塞狀態以等待隊列空間有效。這種情況下,一旦隊列空間有效,只會有一個任務會被解除阻塞,這個任務就是所有等待任務中優先級最高的任務。而如果所有等待任務的優先級相同,那么被解除阻塞的任務將是等待最久的任務。
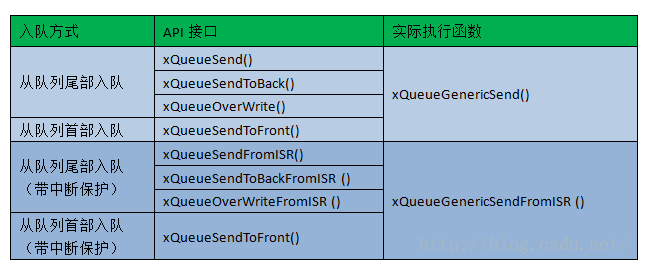
消息隊列的工作流程1.發送消息
任務或者中斷服務程序都可以給消息隊列發送消息,當發送消息時,如果隊列未滿或者允許覆蓋入隊, FreeRTOS 會將消息拷貝到消息隊列隊尾,否則,會根據用戶指定的阻塞超時時間進行阻塞,在這段時間中,如果隊列一直不允許入隊,該任務將保持阻塞狀態以等待隊列允許入隊。當其它任務從其等待的隊列中讀取入了數據(隊列未滿),該任務將自動由阻塞態轉為就緒態。當任務等待的時間超過了指定的阻塞時間,即使隊列中還不允許入隊,任務也會自動從阻塞態轉移為就緒態,此時發送消息的任務或者中斷程序會收到一個錯誤碼 errQUEUE_FULL。
發送緊急消息的過程與發送消息幾乎一樣,唯一的不同是,當發送緊急消息時,發送的位置是消息隊列隊頭而非隊尾,這樣,接收者就能夠優先接收到緊急消息,從而及時進行消息處理。
下面是消息隊列的發送API接口,函數中有FromISR則表明在中斷中使用的。
消息隊列讀取
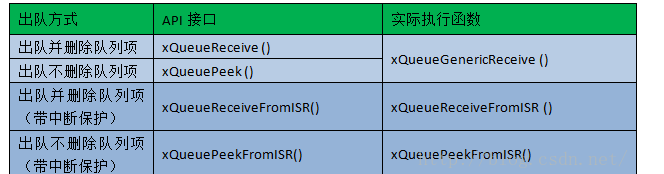
任務調用接收函數收取隊列消息, 函數首先判斷當前隊列是否有未讀消息, 如果沒有, 則會判斷參數 xTicksToWait, 決定直接返回函數還是阻塞等待。
如果隊列中有消息未讀, 首先會把待讀的消息復制到傳進來的指針所指內, 然后判斷函數參數 xJustPeeking == pdFALSE的時候, 符合的話, 說明這個函數讀取了數據, 需要把被讀取的數據做出隊處理, 如果不是, 則只是查看一下(peek),只是返回數據,但是不會把數據清除。
對于正常讀取數據的操作, 清除數據后隊列會空出空位, 所以查看隊列中的等待列表中是否有任務等發送數據而被掛起, 有的話恢復一個任務就緒, 并根據優先級判斷是否需要出進行任務切換。
對于只是查看數據的, 由于沒有清除數據, 所以沒有空間新空出,不需要檢查發送等待鏈表, 但是會檢查接收等待鏈表, 如果有任務掛起會切換其到就緒并判斷是否需要切換。
接下來,我們可以從中斷再到任務這樣一個流程去編寫代碼:
如下的框圖來說明一下 FreeRTOS 消息隊列的實現,讓大家有一個形象的認識。

1. 中斷如何處理:
///
void LpUart0_IRQHandler(void)
{
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
uint8_t res=0;
// if(LPUart_GetStatus(M0P_LPUART0, LPUartPE))/*奇偶檢驗錯誤*/
// {
// LPUart_ClrStatus(M0P_LPUART0, LPUartPE);
// }
if(LPUart_GetStatus(M0P_LPUART0, LPUartRC)) ///接收數據中斷
{
LPUart_ClrStatus(M0P_LPUART0, LPUartRC); ///<清接收中斷請求? ?? ???
res =LPUart_ReceiveData(M0P_LPUART0);
xQueueSendFromISR(usart_Queue,(void *) &res,&xHigherPriorityTaskWoken);
portYIELD_FROM_ISR(xHigherPriorityTaskWoken);
}
}
任務中接收信號,這里并不是每一條消息都接收嗎,因為沒有空閑中斷,而是做了100ms絕對延時,確保一幀數據接收完成。
/**
***********************************************************************
** \brief 2400波特率:'100ms = 24bytes'
**
**
** \param 1 :void
** \retval void
***********************************************************************/
void APP_LocalCOM_ReadData(void)
{
uint8_ttemp_bytes = 0; /*隊列中字節長度new*/
uint8_t cnt;
static uint8_tbuff[QueueSIZE] = {0}; /*暫存接收協議,從0x68開始,用于crc計算*/
static TickType_t StartTick = 0;
static uint8_t ShadowBytes = 0;/*old*/
temp_bytes = uxQueueMessagesWaiting(usart_Queue);//檢查消息數
if(temp_bytes == 0)//檢查隊列的長度
{
ShadowBytes = 0;
}
else
{
if(ShadowBytes != temp_bytes)//有新的數據
{
ShadowBytes = temp_bytes;
StartTick = xTaskGetTickCount();
}
else
{
if(xTaskGetTickCount() - StartTick > 100)
{
for(cnt = 0; cnt
{
xQueueReceive(usart_Queue,(void*)&buff[cnt%QueueSIZE],(TickType_t)100);//接收數據
}
protocol_parse(buff,temp_bytes);
//BSP_UARTx_SendBytes(M0P_UART0,temp_bytes, buff); //test
}
}
}
}
編輯:hfy
-
數據存儲
+關注
關注
5文章
1025瀏覽量
52952 -
FreeRTOS
+關注
關注
14文章
499瀏覽量
66947 -
隊列
+關注
關注
1文章
46瀏覽量
11237
發布評論請先 登錄
C語言重點—指針篇
RTOS在嵌入式開發中的作用
使用RTOS時需要注意的幾點內容分享
選擇RTOS的要點
如何在 RTOS 中處理微控制器的低功耗特性
RTOS Crash 問題全維度分析與解決指南
學習RTOS的意義?
嵌入式需要掌握哪些核心技能?
請問編譯純rtos到底是選擇Linux+rtos的sdk編譯only rtos還是直接使用rtos sdk?
程序設計與數據結構
如何在Eclipse ThreadX RTOS中集成SystemView
RTOS如何在FX3中工作?
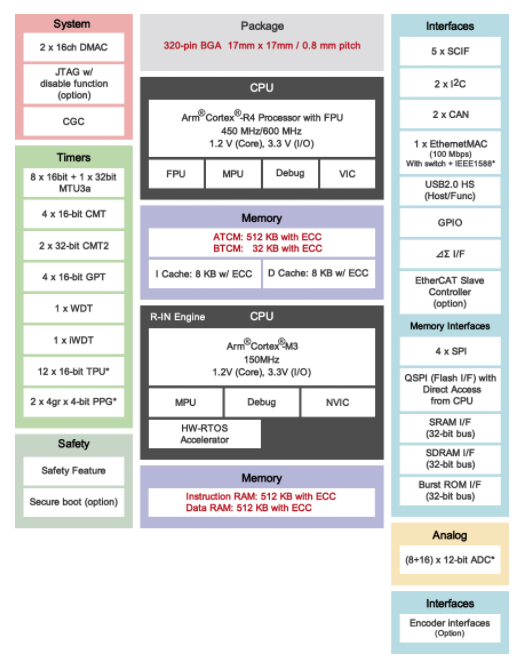
實現工業設備實時控制和聯網的微處理器RZ/T1數據手冊



 工商網監
工商網監
評論