") 新型攝像頭與算法結(jié)合 實現(xiàn)飛行器3.5 毫秒快速反應(yīng)
新型攝像頭與算法結(jié)合 實現(xiàn)飛行器3.5 毫秒快速反應(yīng)

用籃球砸中 3 米外懸停的無人機,你能做到嗎?
那些打過籃球并玩過無人機的人,會想當(dāng)然地回答,小事一樁。但在這臺無人機面前,你錯了,因為它會快速、靈活地躲避飛來的襲擊。
最近,來自瑞士蘇黎世大學(xué)(University of Zurich)的研究人員設(shè)計出一種新方法,可以讓無人機在主動躲閃移動障礙物的情況下快速導(dǎo)航。該研究讓無人機向著擁有更優(yōu)異的性能,比如在惡劣環(huán)境下更快速地飛行,在更短時間內(nèi)完成更多任務(wù)等邁出很大一步。
圖 | 成功躲避球的無人機(來源:Davide Scaramuzza)
當(dāng)下市面上的無人機已經(jīng)可以承擔(dān)很多工作,但是躲避障礙物并不是它們的強項——尤其是在無人機快速移動時。盡管許多飛行機器人都配備了可以檢測障礙物的攝像頭,但通常它們都需要 20~40 毫秒的時間來處理圖像并做出反應(yīng)。這個時間看似很快,但當(dāng)無人機自身以較高的速度飛行時,20~40 毫秒的反應(yīng)時間對于避開飛鳥或者另一架無人機,甚至是靜態(tài)障礙物來說,都是不夠的。尤其是當(dāng)無人機在一個不可預(yù)測的環(huán)境中使用時,或者有多架無人機在同一片區(qū)域飛行時,這會是個棘手的問題。
蘇黎世大學(xué)的研究人員將一種類似運動傳感器的 “事件攝像頭” 整合在一起,并設(shè)計了新的算法,從而將無人機的反應(yīng)時間縮短到了幾毫秒。這個近乎一個數(shù)量級的提升,足以讓無人機在空中躲開短距離內(nèi)向其砸來的球或其他物品。該研究發(fā)表在了最新一期的《科學(xué) · 機器人》(Science Robotics)雜志上,由蘇黎世大學(xué)機器人技術(shù)和感知方向的教授 Davide Scaramuzza 領(lǐng)導(dǎo)。
新型攝像頭與算法結(jié)合,3.5 毫秒快速反應(yīng)
傳統(tǒng)的攝像頭,例如智能手機上的那種,都是通過定期拍攝整個場景的快照來工作,它會同時曝光圖像的所有像素。但是,通過這種方式,只能在機載計算機分析完所有像素之后才能檢測到運動物體。
Davide 研究團隊的 “事件攝像頭” 則不同,其具有彼此獨立工作的智能像素。它在未檢測到外界的變化像素時會保持沉默,而一旦看到了光強度變化的像素就會立即發(fā)送信息。這樣一來,機載計算機只需處理圖像中的一小部分變化像素,因此大大加快了計算速度,從而縮短了反應(yīng)時間。
Davide 向 DeepTech 具體解釋道:“事件在時空域中生成一個體。我們的算法只考慮在過去 10 毫秒內(nèi)出現(xiàn)的事件。我們補償攝像頭看到的運動,并分析所有事件的統(tǒng)計數(shù)據(jù)。對于每個像素,我們計算歸一化的平均時間戳,它的范圍介于 -1 和 1 之間,動態(tài)對象的得分非常接近于 1。這使我們可以將事件的閾值分別以靜態(tài)對象和動態(tài)對象區(qū)分開。”
圖 | 自我運動補償算法的各個階段,以便區(qū)分出屬于移動障礙的事件(來源:Davide Scaramuzza)
除此之外,“目前的無人機,其目標(biāo)檢測算法無法很好地和我們開發(fā)的新型攝像頭配合工作。”Davide 解釋說,“事件攝像頭”是一項最近的創(chuàng)新工作,并且功能與傳統(tǒng)攝像頭不同。我們的攝像頭不以恒定的時間間隔輸出標(biāo)準(zhǔn)圖像,而是輸出與每個像素強度變化相對應(yīng)的異步事件流。因此,其他研究人員必須發(fā)明自己的算法,在很短的時間內(nèi)收集攝像頭記錄的所有事件,然后減去無人機自身運動的影響。
據(jù) Davide 介紹,該研究使用的 “事件攝像頭”,目前世界上只有 5 家公司生產(chǎn)。“因為這種傳感器直到 10 年前還只是研究原型,我們使用的是 Insightness 公司的設(shè)備。” 研究中所用的無人機平臺,是 Davide 實驗室定制的四軸飛行器,跟市售的商品區(qū)別不是很大,但用于感知和導(dǎo)航的算法都是他的團隊開發(fā)的。
在研究過程中,Davide Scaramuzza 和同事首先分別測試了攝像頭和算法。
在攝像頭被單獨靜止放置時,他們將各種形狀和大小的物體扔向它,同時測量了算法檢測物體的效率。結(jié)果顯示,根據(jù)物體大小和投擲距離的不同,檢測成功率在 81%~97% 之間上下浮動。此外,該系統(tǒng)的平均反應(yīng)時間只需 3.5 毫秒,便可檢測到飛來的物體。
隨后,最為嚴(yán)峻的考驗開始了:他們將攝像頭安裝在真正的無人機上,讓其在室內(nèi)和室外飛行,然后直接向無人機投擲物體。經(jīng)過多次測試,無人機能夠成功避開物體的概率超過 90%,這其中包括從 3 米遠(yuǎn)的地方以 10 米 / 秒的速度扔出的球。當(dāng)測試無人機提前 “知道” 物體的大小時,只需一臺 “事件攝像頭” 就足夠了;而當(dāng)無人機需要面對大小不同的飛來物體時,則需要使用兩個攝像頭來為其提供立體視覺。
正在接洽商業(yè)化
那么,這項研究能否在短期內(nèi)投入規(guī)模化應(yīng)用呢?Davide 向 DeepTech 透露:“在原則上,該技術(shù)已經(jīng)做好了商業(yè)化準(zhǔn)備,我們正在與一些公司討論細(xì)節(jié)之中。”
至于未來的研究方向,Davide 對 DeepTech 說:“我們的計劃是在一個更靈活的四旋翼上測試這個系統(tǒng)。而對于更長遠(yuǎn)的目標(biāo),我們最終是想有一天能夠讓無人機達(dá)到如今飛行員操縱一般的駕駛自如。當(dāng)前,在涉及無人機的所有搜索和救援應(yīng)用中,實際上都是人為控制的。如果我們能讓無人機擁有像人類飛行員一樣可靠的導(dǎo)航能力,那么就可以將其用于超出視線范圍或無法遠(yuǎn)程控制的任務(wù)中。”
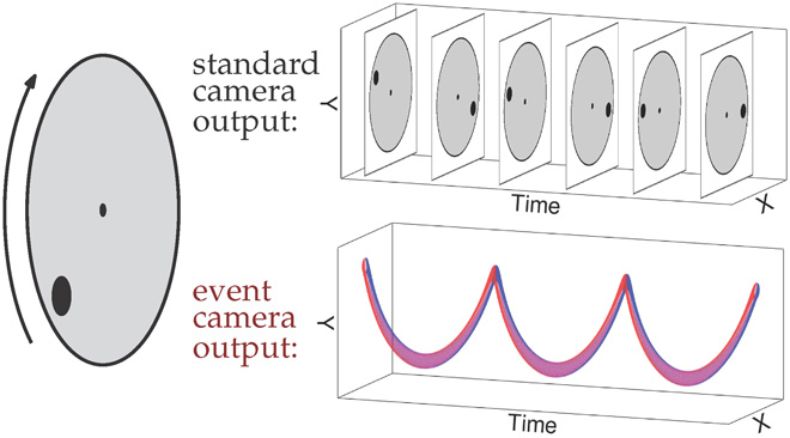
圖 | 比較傳統(tǒng)攝像頭與事件攝像頭的輸出:傳統(tǒng)攝像頭以固定的速率捕獲幀;而事件攝像頭僅以時空事件的螺旋形式,連續(xù)輸出亮度變化的信號,紅色為正向變化,藍(lán)色為負(fù)向變化(來源:Davide Scaramuzza)
Davide Scaramuzza 所在的蘇黎世大學(xué)機器人與感知小組實驗室,一直專注于開發(fā)可以讓自動無人機快速飛行的新技術(shù),以便執(zhí)行對時間要求更為嚴(yán)格的任務(wù),例如在發(fā)生自然災(zāi)害之后對惡劣的環(huán)境進行探索等。
“對于諸如地震、海嘯發(fā)生后的搜尋和救援工作來說,時間是非常關(guān)鍵的。因此人們需要能夠在有限的電量時間內(nèi)(通常為 10~20 分鐘)完成盡可能多任務(wù)的快速導(dǎo)航無人機。” Davide 向 DeepTech 解釋道。“當(dāng)我們的新攝像頭將無人機的導(dǎo)航速度提高十倍左右時,也擴展了其潛在的其他應(yīng)用可能。”
“未來總有一天,無人機將會被投入到各種各樣的應(yīng)用中,例如貨物交付、人員運輸、航空攝影術(shù)等,當(dāng)然還有提到的搜救。” 他說,“但是,讓機器人能夠更快地感知并更快地做出決策,對于其他領(lǐng)域來說也可以改變游戲規(guī)則。在一些領(lǐng)域中,比如無人駕駛汽車、運輸、采礦機器人,以及進行遠(yuǎn)程檢查工作的設(shè)備等,可靠地檢測視野內(nèi)的障礙也是至關(guān)重要的。
安全問題,對于每個人來說都是非常重要的事情。“我們的研究向著未來無人機或者汽車更加智能化且更加安全邁出了一小步。” 他表示,他和團隊成員對這項研究所展現(xiàn)的躲避功能感到十分興奮,“我們從未見過商用無人機對快速移動的障礙做出如此迅速的反應(yīng),這是所有飛行機器人在任何環(huán)境中安全導(dǎo)航的關(guān)鍵要素。”
植根學(xué)界,兼顧創(chuàng)業(yè)
Davide Scaramuzza 于 1980 年出生于意大利,目前是蘇黎世大學(xué)信息學(xué)和神經(jīng)信息學(xué)的教授,同時他也是蘇黎世聯(lián)邦理工學(xué)院(ETH Zurich)神經(jīng)信息學(xué)教授。他從事機器人、計算機視覺和神經(jīng)科學(xué)交叉領(lǐng)域的研究。具體來說,他研究標(biāo)準(zhǔn)和神經(jīng)形態(tài)攝像頭的使用,使微型無人機在搜索和救援場景中能夠自主、靈活地導(dǎo)航。
他在蘇黎世聯(lián)邦理工學(xué)院獲得了機器人和計算機視覺博士學(xué)位,隨后在賓夕法尼亞大學(xué)(University of Pennsylvania)進行博士后的學(xué)習(xí)和工作。從 2009 年到 2012 年,他領(lǐng)導(dǎo)了歐洲 sFly 項目——該項目引入了 PX4 自動駕駛儀,并開創(chuàng)了基于視覺沖擊的微型無人機自主導(dǎo)航。
由于他在視覺導(dǎo)航方面的研究貢獻(xiàn),他被授予 IEEE 機器人與自動化社會職業(yè)生涯早期獎,SNSF-ERC 啟動資金,谷歌研究獎,庫卡、高通和英特爾等獎項,歐洲青年研究獎,Misha Mahowald 神經(jīng)形態(tài)工程獎,以及一些會議論文獎等。
他與人合著了《自主移動機器人導(dǎo)論》(Introduction to Autonomous Mobile Robots,由 MIT Press 出版),并在頂級期刊(TRO、PAMI、IJCV、IJRR)和會議(RSS、ICRA、CVPR、ICCV)上發(fā)表過 100 多篇關(guān)于機器人和感知的論文。
2015 年,Davide 與他人共同創(chuàng)立了一家名為“蘇黎世之眼”(Zurich-Eye)的公司,致力于將移動機器人的視覺慣性導(dǎo)航解決方案商業(yè)化,該公司后來成為了 Oculus 公司(2014 年被 Facebook 收購, 5 年多時間馬克 ? 扎克伯格在虛擬現(xiàn)實領(lǐng)域投入了數(shù)十億美元)的歐洲研究中心。此外,他還是 Dacuda 公司(瑞士一家計算機視覺公司,其 3D 部門在 2017 年被 Magic Leap 公司收購)的戰(zhàn)略顧問。
編輯:hfy
-
AI
+關(guān)注
關(guān)注
91文章
39844瀏覽量
301505 -
移動機器人
+關(guān)注
關(guān)注
2文章
818瀏覽量
34876 -
飛行器
+關(guān)注
關(guān)注
13文章
832瀏覽量
47705 -
無人機
+關(guān)注
關(guān)注
236文章
11306瀏覽量
195776 -
運動傳感器
+關(guān)注
關(guān)注
9文章
175瀏覽量
31841
發(fā)布評論請先 登錄
ESP32-S3在初始化攝像頭時檢測到攝像頭模組型號不被支持
芯片電感/半導(dǎo)體模組磁性元器件在低空飛行器領(lǐng)域的應(yīng)用范圍及其作用
自動駕駛既然有雙目攝像頭了,為什么還要三目攝像頭?

實戰(zhàn)指南:用攝像頭模塊實現(xiàn)多場景智能拍攝全流程!
多場景智能拍攝實戰(zhàn):攝像頭模塊集成與調(diào)試指南!
蜂鳥處理器+OV5640攝像頭模塊開發(fā)

創(chuàng)世SD NAND貼片卡:智能攝像頭存儲難題的完美解決方案 #人工智能 #智能攝像頭 #攝像頭
紅外攝像頭模組是什么?科技時代的眼睛

【EASY EAI Orin Nano開發(fā)板試用體驗】--USB攝像頭使用
K230micropython下能實現(xiàn)同時用USB攝像頭和板載攝像頭YOLO識別并顯示在IDE上嗎?
用于攝像頭模塊的 Open Top QFN 插槽Ironwood Electronics
一拖四USB多攝像頭同步采集方案:高效數(shù)據(jù)處理的革新突破

天波解疑:IPC監(jiān)控攝像頭的低功耗特點及其優(yōu)勢

基于RV1126開發(fā)板實現(xiàn)多路網(wǎng)絡(luò)攝像頭取流方案

社區(qū)安裝IPC攝像頭,跟安裝一般安防監(jiān)控攝像頭有什么區(qū)別?




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論