") 如何利用Micro:bit做一個倒車?yán)走_(dá)
如何利用Micro:bit做一個倒車?yán)走_(dá)

之前用Ameba開發(fā)板做了一個倒車?yán)走_(dá),micro:bit也可以實(shí)現(xiàn)同樣的功能。今天就用micro:bit做一個倒車?yán)走_(dá)實(shí)作。
任務(wù)目標(biāo)
當(dāng)距離小于 15 公分時,使 5 x 5 的 LED 以 0 來顯示以提醒用路人安全,否則將 5 x 5 的 LED 以 1 來顯示。
學(xué)習(xí)目標(biāo)
超音波傳感器使用
導(dǎo)入套件
LED 顯示
變量使用
條件判斷
循環(huán)使用
使用料件
Micro:bit
面包板
Micro USB Cable
超音波傳感器 ( Ultrasonic Seneor - HC-SR04P )
鱷魚夾
杜邦線
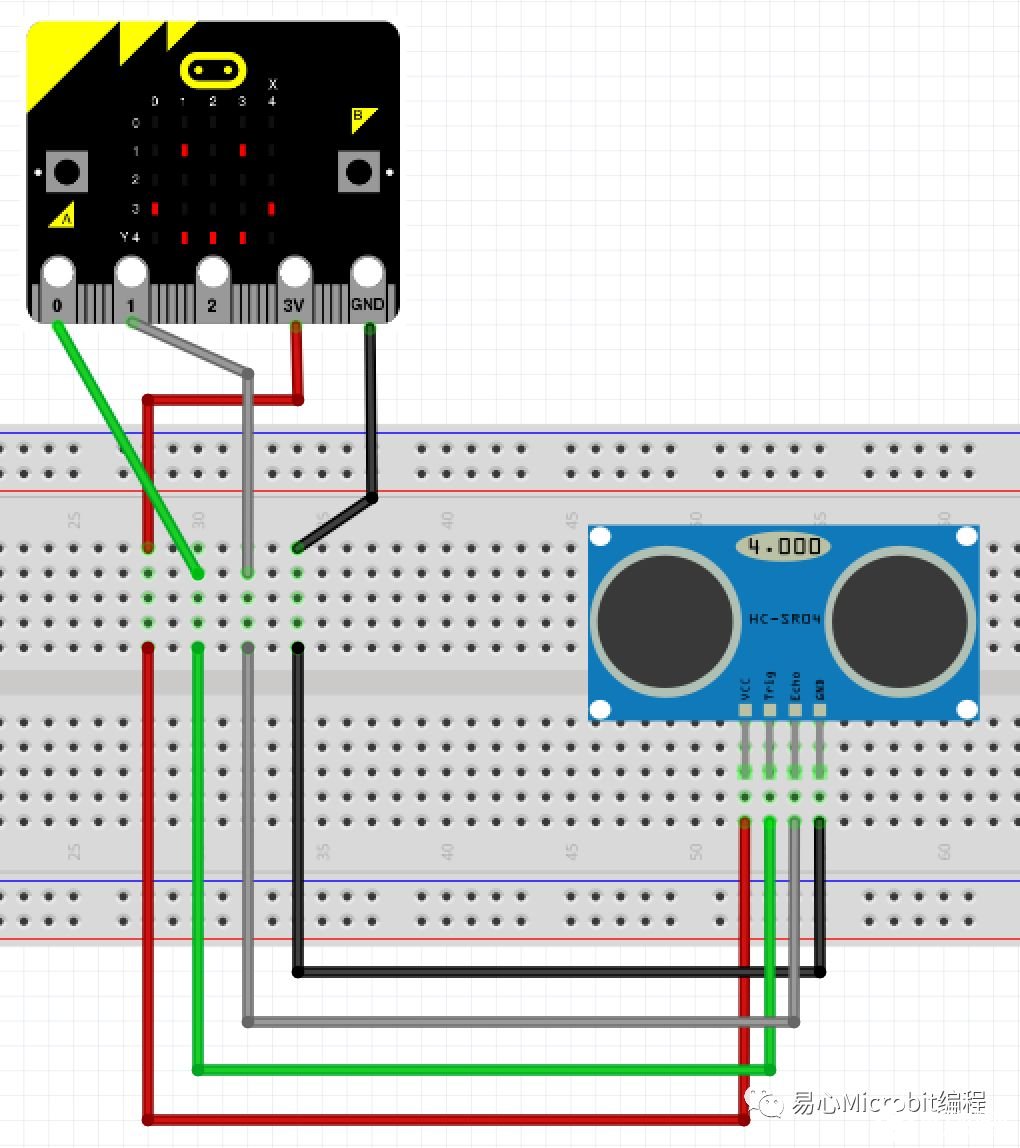
接線方式
超音波傳感器的 VCC 接 Micro:bit 的 3V
超音波傳感器的 Trig 接 Micro:bit 的 P0
超音波傳感器的 Echo 接 Micro:bit 的 P1
超音波傳感器的 GND 接 Micro:bit 的 GND
倒車?yán)走_(dá)程序邏輯
持續(xù)不斷的使用超音波傳感器偵測距離
當(dāng)所偵測到的距離小于 15 公分時,則
將 5 x 5 的 LED 以 0 來顯示
否則,
將 5 x 5 的 LED 以 1 來顯示
倒車?yán)走_(dá)程序撰寫
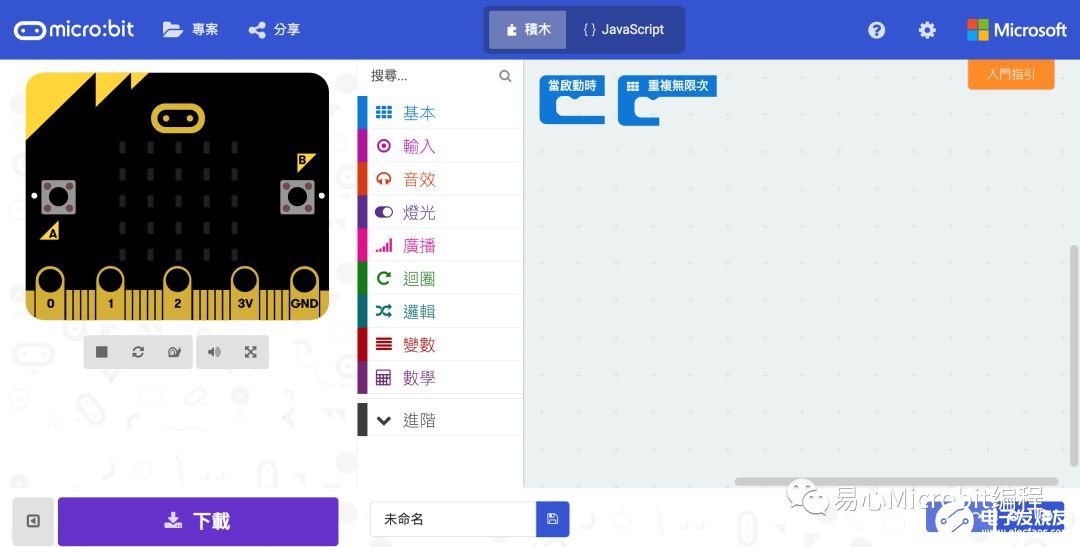
Step 1. 開啟在線編輯器
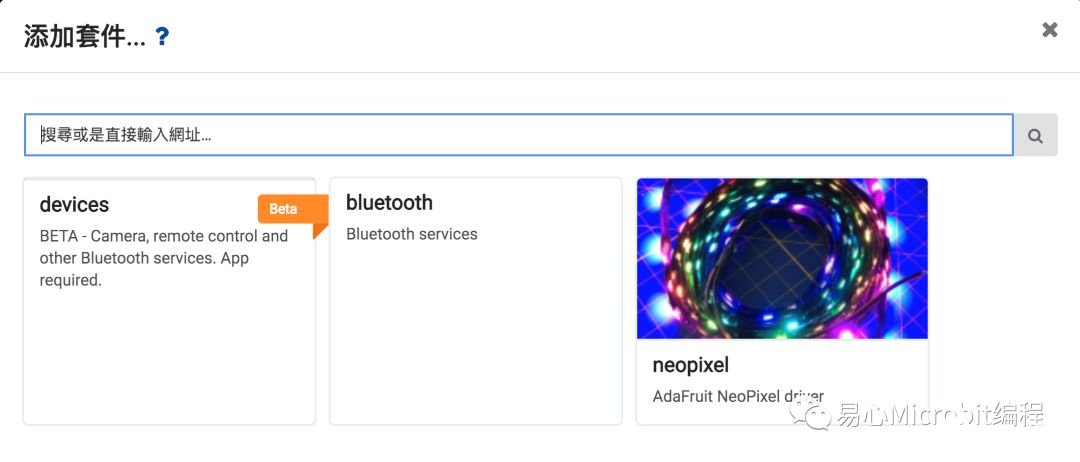
Step 2. 導(dǎo)入套件
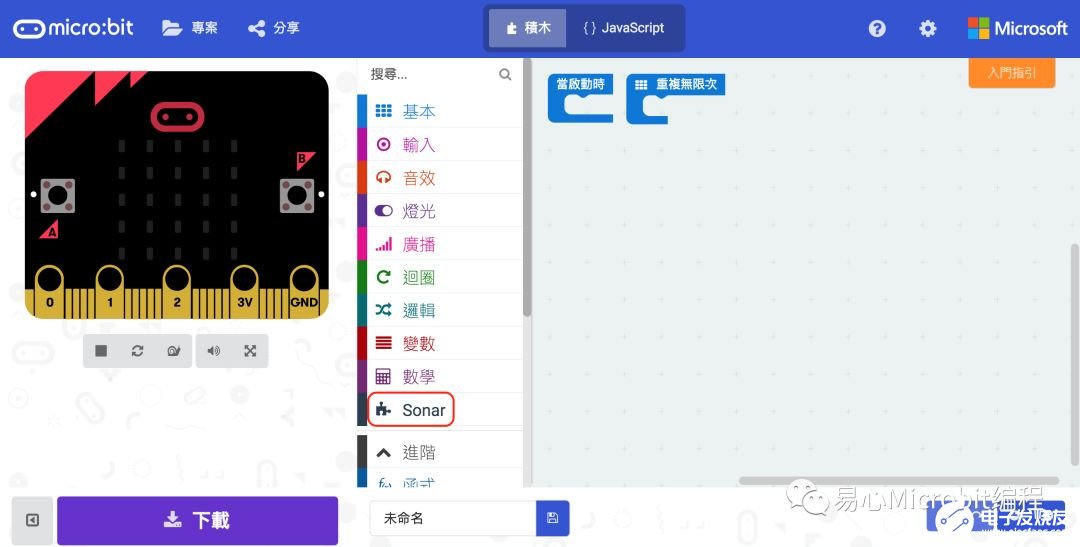
2.1 點(diǎn)選【進(jìn)階】中的【添加套件】

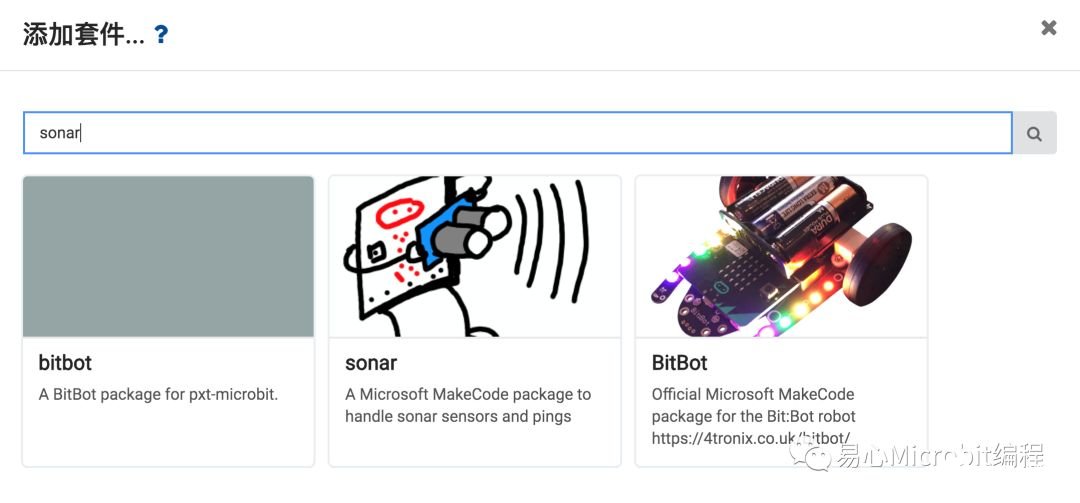
2.2 在【搜尋或是直接輸入網(wǎng)址】的字段中輸入【 sonar 】再點(diǎn)選右邊的放大鏡進(jìn)行搜尋
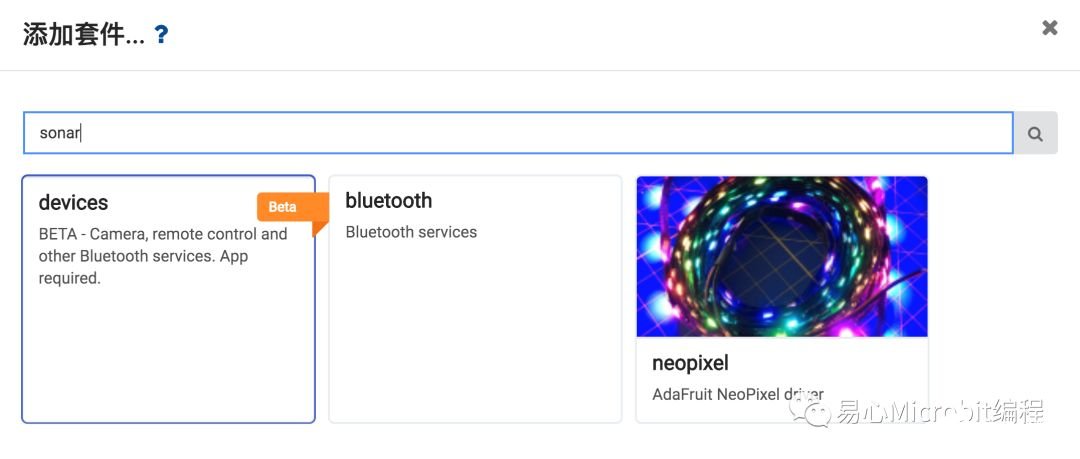
2.3 點(diǎn)選中間的【 sonar 】套件
2.4 【 Sonar 】套件已安裝于程序方塊區(qū)
Step 3. 撰寫 Blockly 程序
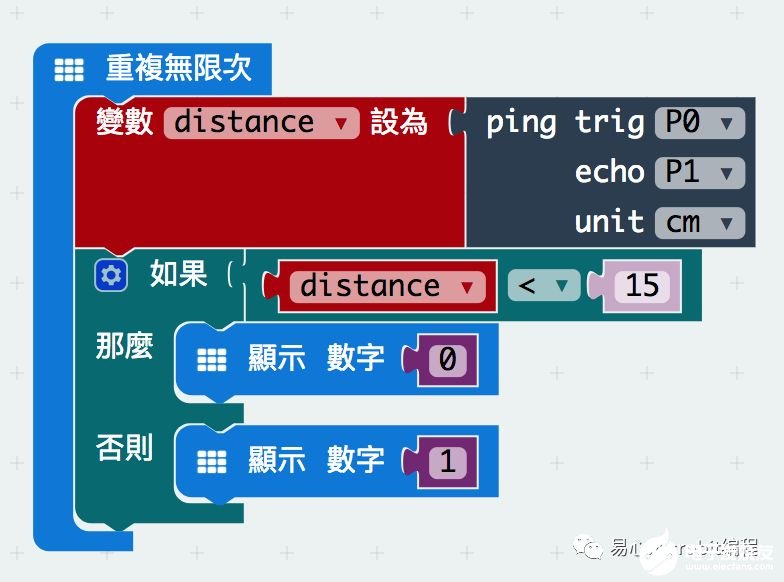
3.1 依倒車?yán)走_(dá)程序邏輯進(jìn)行Blockly 程序撰寫
※程序說明※
【重復(fù)無限次】方塊:代表持續(xù)不斷執(zhí)行此區(qū)塊中的程序
【變量設(shè)為】方塊:宣告一個 distance 的變量存放超音波傳感器所偵測到的數(shù)值,
其單位為公分
【如果那么否則】方塊:當(dāng) distance 的數(shù)值小于 15 公分時,則
在 LED 上顯示 0
否則,
在 LED 上顯示 1
Step4. 下載程序到 Micro:bit并測試結(jié)果
-
傳感器
+關(guān)注
關(guān)注
2576文章
55041瀏覽量
791336 -
倒車?yán)走_(dá)
+關(guān)注
關(guān)注
4文章
77瀏覽量
24590 -
雷達(dá)
+關(guān)注
關(guān)注
52文章
3328瀏覽量
123901
發(fā)布評論請先 登錄
定華雷達(dá)儀表學(xué)堂:不適合安裝雷達(dá)物位計的三個位置

人體存在感應(yīng)雷達(dá)如何“看”見靜止的你?

如何使用menuconfig添加配置micro-ros軟件包?
泰矽微(Tinychip Micro)發(fā)布國內(nèi)首款車規(guī)級高壓直驅(qū)超聲波傳感芯片TCAU33
高通道數(shù)雷達(dá)如何消除模糊性
大彩講堂:VisualHMI-LUA教程-set_bit/get_bit函數(shù)應(yīng)用

用Wi-Fi藍(lán)牙模組Ai-M62-CBS做一個電子沙漏

一種新型激光雷達(dá)慣性視覺里程計系統(tǒng)介紹

利用LT8361做一個將30V輸入轉(zhuǎn)為-70V或-80V或-90V輸出,它可以在理論上實(shí)現(xiàn)嗎?
功德+1,用小安派-Eyes-S1做一個電子木魚




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論