 RoboBee的折紙啟發式制造工藝是否可以用于構建多種規模的機器人?
RoboBee的折紙啟發式制造工藝是否可以用于構建多種規模的機器人?

哈佛大學的研究人員使微型哈佛微型機器人(HAMR)變得更加小巧。下一代受蟑螂啟發的機器人只有一分錢大小,并且可以每秒13.9體長的速度運行。
這使其成為迄今為止最小,最快的微型機器人之一。該團隊還認為,它是同等規模中最靈巧的機器人。
該機器人被稱為HAMR-JR,是其前身的一半比例版本,研究人員教該機器人在水下游泳和行走。
該團隊構建了HAMR-JR,部分是為了測試用于構建HAMR和其他微型機器人(例如RoboBee)的折紙啟發式制造工藝是否可以用于構建多種規模的機器人-從像HAMR-JR這樣的小型機器人到大型機器人,工業機器人。
他們發現,即使在微觀尺度上,他們也能夠使設計保持同樣的復雜性。
研究人員還希望了解縮小機器人的規模將如何影響其運行速度和其他功能。他們將四足式HAMR-JR的身長縮小到僅2.25厘米-重量約為0.3克。該小組模仿了類似規模的昆蟲的運動,因此HAMR-JR能夠小跑,跳躍,束縛和打叉。它可以左右旋轉,也可以向后小跑。
Jayaram說:“大多數這種規模的機器人都非常簡單,只展示基本的移動性。” “我們已經證明您不必犧牲靈活性或控制尺寸。”
Jayaram及其合著者Samantha Castellanos,E.Farrell Helbling和Jennifer Shum在本周舉行的國際機器人自動化國際會議上介紹了他們的發現,麻省理工學院的團隊還介紹了提高軟機器人的空間感知能力和抓取精致物體能力的工作。
責任編輯:pj
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
31079瀏覽量
222244 -
微型機器人
+關注
關注
0文章
112瀏覽量
20207 -
工業機器人
+關注
關注
91文章
3534瀏覽量
98184
發布評論請先 登錄
相關推薦
熱點推薦
再談低溫燒結銀的應用:從春晚四家機器人出鏡的幕后推手說起
**< 5%**。
保障春晚機器人360° 感知、毫米級定位、動態平衡的穩定性。
(3)AI芯片和主控:計算大腦
用于芯片倒裝、3D 堆疊、熱界面材料TIM,熱阻低至0.12**℃?cm
發表于 02-17 14:07
人形機器人迅猛發展,可以給養老行業帶來哪些利好
人形機器人迅猛發展,可以給養老行業帶來哪些利好,銀發經濟在人形機器人時代是否會出現井噴式增長?時代的機遇是否已經來臨?

機器人內部零配件的生產加工廠從哪找?
機器人內部零配件生產廠家哪里找?東莞力存科技為您揭秘數控車床加工的關鍵要素
隨著機器人文化在中國的快速普及,機器人市場呈現出爆發式增長態勢。據最新市場數據顯示,2025 年全球智能
發表于 12-09 18:22
高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
一、背景:機器人邁向“微米級控制時代”
隨著智能制造和自動化產業的持續升級,工業機器人不再僅僅承擔重復搬運,而是被要求在裝配、檢測、精密加工等高精度場景中完成微米級控制任務。
在這些“高精度機
發表于 11-14 15:48
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
。· 利用開發板上的MIPI CSI1和CSI2接口,完整接入8路攝像頭,實現了所有通道的視頻預覽與采集,為機器人構建了全方位的視覺感知系統。卓越性能表現:· CPU占用率:34%· DDR占用率:50
發表于 10-29 16:41
小蘿卜機器人的故事
經過我的申請,
馬老師發放了,
小蘿卜機器人的,
開發權限,
原來的小蘿卜公司,
因為經營不善倒閉,
作為科研產品,
幾個技術對此惋惜,
自掏腰包,
要讓小蘿卜機器人,
再生,
每次聽到小蘿卜說
發表于 10-23 05:24
工業機器人:現代制造業的智能引擎
的發展與應用 ?? 工業機器人最早應用于20世紀60年代,主要用于汽車行業的焊接、噴涂等重復性工作。如今,其應用范圍已大幅擴展,涵蓋裝配、搬運、檢測、包裝等多個環節。例如,在電子制造業
智能制造工業機器人技術發展趨勢
(一)大范圍動態場景理解 工業機器人在自主制造場景中,對環境和運行狀態感知要求高,作業環境多變、狀態難測。需構建動態語義地圖,解決機器人精細化路徑規劃、協同作業控制難題,實時感知
盤點#機器人開發平臺
地瓜機器人RDK X5開發套件地瓜機器人RDK X5開發套件產品介紹 旭日5芯片10TOPs算力-電子發燒友網機器人開發套件 Kria KR260機器人開發套件 Kria KR260-
發表于 05-13 15:02
詳細介紹機場智能指路機器人的工作原理
機場智能指路機器人主要依靠感知系統、定位系統、導航系統、智能交互系統和運動系統協同工作,來實現為旅客準確指路和提供服務的功能,以下是其詳細工作原理:
感知系統
傳感器類型 :機器人配備了多種傳感器
發表于 05-10 18:26
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
閱讀心得體會:ROS2機器人視覺與地圖構建技術
通過對本書第7章(ROS2視覺應用)和第8章(ROS2地圖構建)的學習,我對機器人視覺感知和自主導航的核心技術有了更深入的理解。以下是我
發表于 05-03 19:41
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
ROS的全稱:Robot Operating System 機器人操作系統
ROS的 目的 :ROS支持通用庫,是通信總線,協調多個傳感器
為了解決機器人里各廠商模塊不通用的問題,讓機器人快速開發
發表于 04-30 01:05
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
地圖構建→路徑規劃→動態避障)等等
2. 機器人功能開發
相較于ROS入門21講,書中更是詳細書寫了關于機器人的功能開發,并且十分完善,教程詳盡
傳感器數據處理:機器人通常配備
發表于 04-27 11:24
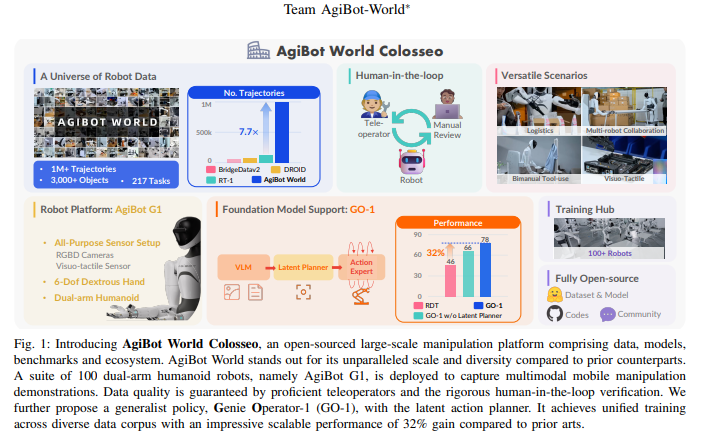
AgiBot World Colosseo:構建通用機器人智能的規模化數據平臺
AgiBot World Colosseo:構建通用機器人智能的規模化數據平臺 隨著人工智能在語言處理和計算機視覺領域取得突破,機器人技術仍面臨現實場景泛化能力的挑戰。這一困境的核心在



 工商網監
工商網監
評論