 研究人員最近設計并制造了受人體骨骼結構啟發的機器人手指
研究人員最近設計并制造了受人體骨骼結構啟發的機器人手指

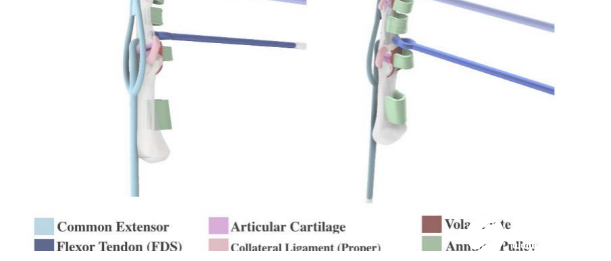
人類天生就可以通過關節的骨骼內結構進行復雜的運動。韌帶和肌腱彈性地連接到相當剛性的骨骼結構,使這些運動成為可能。
加利福尼亞大學圣克魯斯分校和日本立命館大學的研究人員最近設計并制造了受人體骨骼結構啟發的機器人手指。在今年的無處不在的機器人和環境智能國際會議(URAI)上展示的這種仿生機械手手指是使用多材料3-D打印機組裝而成的。
進行這項研究的研究人員之一Maryam Tebyani對TechXplore表示:“開發像人類手一樣具有硬,軟組成的機械手是我要探索多年的研究課題。”“將彈性和非彈性材料結合起來將解決機器人技術中的一個普遍缺口,在這種情況下,柔性系統可能很難處理重物,而剛性平臺可能需要復雜的制造或控制才能獲得與人手相當的靈活性。”
Tebyani和她的同事們最近的工作的主要目的是創造受自然系統啟發的機器人手。但是,研究人員希望將他們的大部分精力集中在設計人造手上,而不是在制造和組裝上。因此,他們決定采用最先進的3D打印方法,該方法可以簡化并加速整個原型生產過程。
Tebyani解釋說:“在設計過程中利用多種材料的3D打印使我們可以自由設計3D肌腱和韌帶結構,同時還允許我們在單張打印中創建電纜驅動的機器人。”“粘彈性印刷材料嵌入了我們一直在尋找的機械靈活性,因為這些材料允許產生真正有趣的被動行為。從本質上講,該過程使機械設計能夠將某些功能編程到機器人中。”
研究人員設計的機器人手指具有類似于人類的骨骼幾何形狀,韌帶結構,人造肌肉和粘彈性腱。使用多材料3-D打印機將所有這些組件合成為單個零件。Tebyani和她的同事還使用稱為MuJoCo的流行物理仿真引擎開發了手指模型。這樣一來,他們就可以將機器人手指在模擬中所獲得的結果與現實環境中手指的印刷原型所獲得的結果進行比較。
研究人員在實驗中獲得的結果極有希望,突出了將3D打印和模擬技術相結合以創建復雜的機器人系統并獲得對這些系統的更好控制的巨大潛力。他們最終使用的方法使他們能夠將軟機器人技術中普遍使用的粘彈性材料與更傳統的機器人技術相結合,從而使人類骨骼內結構的復制更加緊密。
-
機器人
+關注
關注
213文章
31079瀏覽量
222256 -
機械設計
+關注
關注
7文章
176瀏覽量
20257 -
3D打印機
+關注
關注
10文章
548瀏覽量
46466
發布評論請先 登錄
殺入千元級!外骨骼機器人賣斷貨,這些電機企業加速卡位

高壓放大器在介電彈性體制成的軟機器人研究中的應用
如何在NVIDIA Isaac Lab中使用Newton訓練四足機器人

機器人競技幕后:磁傳感器芯片激活 “精準感知力”
介電彈性體軟機器人研究:高壓放大器的應用實踐

生產線不停擺的“隱形衛士”:優比施UPS電源,精準守護機器人手臂零停機

工業機器人的特點
無刷直流電機雙閉環串級控制系統仿真研究
汽車智造“破界”!PROFIBUS DP轉ETHERNET/IP激活機器人手臂超能力
從機械傳動到智能協同,雅特力助力外骨骼機器人應用創新發展




 工商網監
工商網監
評論