") KUKAC4如何通過逆向啟動鍵進行執(zhí)行反向運行?
KUKAC4如何通過逆向啟動鍵進行執(zhí)行反向運行?

逆向啟動鍵。用逆向啟動鍵可逆向啟動一個程序。程序將逐步運行。
行反向運動 (通過逆向啟動鍵):
如果應優(yōu)化運動的序列并且為此目的重新示教各個點,則通過逆向啟動鍵經常使用反向運行。用戶沿軌跡反向運動,直到到達待修正的點。在重新示教此點之后,必要時繼續(xù)向后運行,以修正其他點。
后退時,自動采用程序運行方式 #BSTEP。
$PRO_MODE程序運行模式#BSTEP后退步進: 連續(xù)后退執(zhí)行到程序的開始.
后退時不能進行軌跡逼近或擺動。如果前行時這些點已被軌跡逼近或擺動,則返回軌跡將不同于前行軌跡。由此在逆向啟動后,盡管機器人完全沒有脫離前行軌跡,但它可能必須先執(zhí)行一次 BCO 運行。
BCO 運行必須作為 LIN 或 PTP 運動從實際位置移動到目標位置。速度已自動下降。無法確保預見運動過程。在 BCO 運行時觀察運動,以便有發(fā)生碰撞的危險時機器人可及時停止。
操作步驟:
1.按住確認開關,直至狀態(tài)欄 “ 驅動器已準備就緒 ” 顯示:
2. 按下并且按住逆向 (后退)啟動鍵。
? 如果機器人已經位于后退軌跡上,則即刻后退。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
31080瀏覽量
222292
原文標題:KUKAC4通過逆向啟動鍵執(zhí)行反向運行
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
熱點推薦
尋求 IOT-MKC3568-Main-v1.1 (基于 EVB1-V10) 開發(fā)板的移植幫助.
設計基于 RK3568 EVB DDR4 V10 參考板。
我已完成了大量基礎工作,并記錄了完整的逆向過程(見個人博客:明控創(chuàng)能 IOT-MKC3568 開發(fā)板系統(tǒng)移植全記錄 - DUTYC博客),但目前在
發(fā)表于 01-11 22:51
d1哪吒開發(fā)板的啟動流程分析
的介質中讀取SPL,然后放到SRAM中執(zhí)行,同時也通過FEL運行環(huán)境。
3.啟動SPL
當BROM啟動完成后,接下來要去存儲介質中尋找SP
發(fā)表于 10-29 06:44
1688 多模態(tài)搜索從 0 到 1:逆向接口解析與 CLIP 特征匹配實踐
本文分享基于CLIP模型與逆向工程實現(xiàn)1688圖片搜同款的實戰(zhàn)方案。通過抓包分析破解接口簽名,結合CLIP多模態(tài)特征提取與Faiss向量檢索,提升搜索準確率至91%,單次響應低于80ms,日均選品效率提升4倍,全程合規(guī)可復現(xiàn)。

按下復位鍵RTT程序死機正常嗎?
裸機程序都是按下復位鍵從頭運行的,RTT按下復位鍵不運行屬于正常嗎?
今天使用野火的板子調試程序,本想連上串口在串口助手打印輸出信息,結果初始化RTT的信息沒打印出來,我重新打開串口,
發(fā)表于 09-24 06:38
三相啟動自耦變壓器,能提升設備運行穩(wěn)定性嗎?
對于水泵、風機行業(yè)來說,啟動設備的穩(wěn)定性至關重要。你是否常常因為普通啟動設備在啟動過程中出現(xiàn)抖動現(xiàn)象,導致設備磨損加劇,進而影響設備的正常運行和使用壽命?同時,

逆向阱技術的精密構建
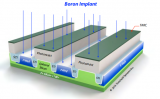
在芯片的硅基世界中,硼離子注入(Boron Implant) 如同納米級的外科手術——通過精準控制高能硼原子打入晶圓特定區(qū)域,構建出晶體管性能的“地基”。而其中顛覆傳統(tǒng)的逆向阱(Retrograde Well) 技術,更是將芯片的能效與速度推向新高度。
啟動ServiceAbility的步驟
代碼后,Ability將通過startAbility()方法來啟動ServiceAbility。
如果ServiceAbility尚未運行,則系統(tǒng)會先調用onStart()來初始化
發(fā)表于 05-28 07:17
逆向工程 拆解F-4戰(zhàn)斗機的三軸姿態(tài)指示儀
Ken Shirriff 大佬逆向工程了 F-4 戰(zhàn)斗機的三軸姿態(tài)指示儀。

如何在i.MX 8XDXL EVK的A35上運行Yocto Linux,在M4上運行FreeRTOS?
方法是什么?具體說來:
1. 我應該如何正確啟動兩個作系統(tǒng)?
2. 當 Linux 在 A35 上運行時,在 M4 上加載和執(zhí)行 FreeRTOS 固件的推薦步驟是什么?
3. 是否需
發(fā)表于 04-04 06:02
三一挖掘機一鍵啟動開關易壞的原因及更換注意事項
一鍵啟動開關的注意事項如果您需要更換移動管家一鍵啟動開關,以下是一些需要注意的事項:確保車輛熄火斷電:在進行任何拆卸或更換工作之前,務必確保
發(fā)表于 03-12 09:29
基于Docker鏡像逆向生成Dockerfile
在本文中, 我們將通過理解Docker鏡像如何存儲數(shù)據, 以及如何使用工具查看鏡像方方面面的信息來逆向工程一個Docker鏡像; 以及如何使用Python的Docker API來構建一個類似Dedockify的工具來創(chuàng)建Dockerfile。




 工商網監(jiān)
工商網監(jiān)
評論