") 機(jī)器人激光釬焊的整體組成
機(jī)器人激光釬焊的整體組成

機(jī)器人激光釬焊的整體組成:
二極管激光器構(gòu)造原理:
1、偏振耦合—為進(jìn)一步提高激光功率,可對(duì)激光束進(jìn)行偏振耦合,類(lèi)似于波長(zhǎng)耦合,兩個(gè)線性極化激光束可通過(guò)選用適合的鏡片進(jìn)行耦合。
2、波長(zhǎng)耦合—為提高激光器在輸出端的激光功率,可將不同波長(zhǎng)的激光光束通過(guò)合適的,絕緣的鏡片耦合到一起。
3、二極管堆棧—為了提高二極管堆發(fā)出的激光功率,將多組二極管堆疊加在一起。
5、聚焦透 鏡—將二極管堆發(fā)出的分散的光束聚焦成適合光纖傳播的光束。
6、準(zhǔn)直透鏡—將發(fā)散光束變成平行光。

二極管激光器堆棧原理:
一個(gè)二極管激光片 包含大量獨(dú)立的發(fā)射極單元 (型號(hào)0.5 x 3 μm2) 這些單元被成排安裝在冷卻單元上,單獨(dú)的二極管激光巴條通過(guò)堆疊,構(gòu)成了二極管堆棧。
Laserline激光焊設(shè)備簡(jiǎn)介:
Laserline總線電路RS485:
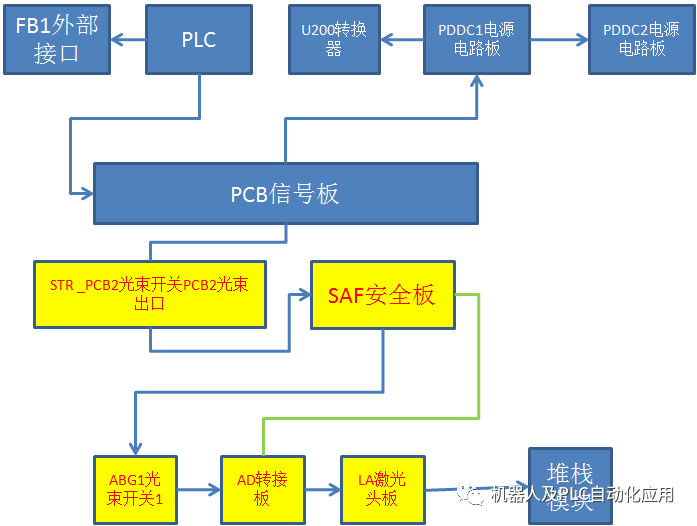
簡(jiǎn)述Laserline各安全部件連接示意圖:
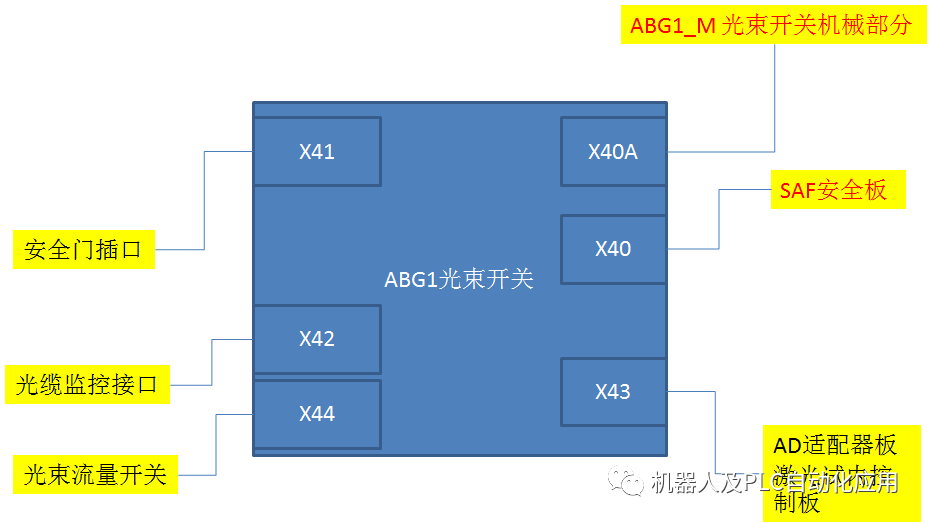
1.ABG光閘開(kāi)關(guān)
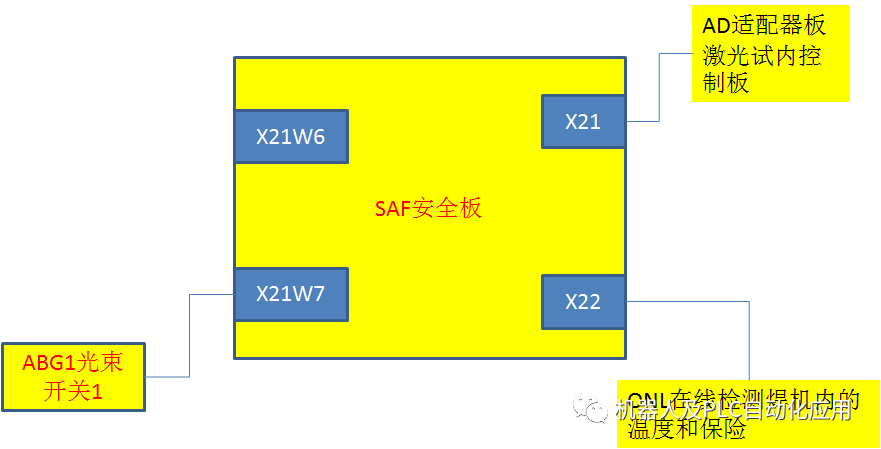
2.安全控制板:
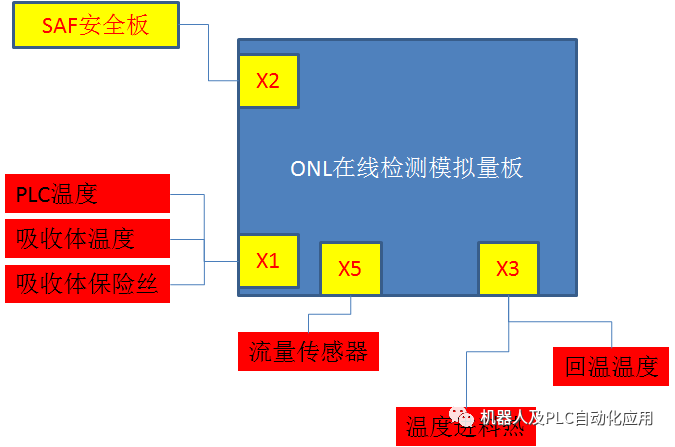
3.信號(hào)采集板:
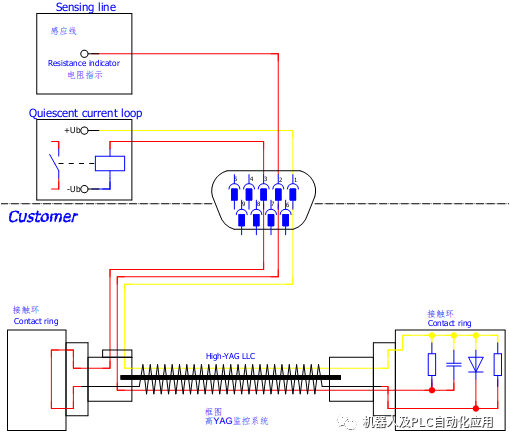
光纜的檢測(cè):
光纜監(jiān)控
,防止光纜斷,通過(guò)測(cè)量電阻值.
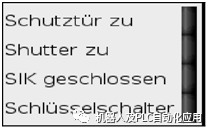
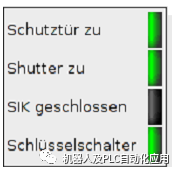
Schutztürzu 安全門(mén)關(guān):
用戶(hù)安全門(mén)打開(kāi)
用戶(hù)安全門(mén)關(guān)閉(外部安全回路A158=E846)
Shutterzu 快門(mén)關(guān):
激光快門(mén)打開(kāi)(激光器出光)
激光快門(mén)關(guān)閉
SIK zuSIK 關(guān):
激光安全回路打開(kāi)
激光安全回路關(guān)閉(內(nèi)部安全回路)E903 -SIK_OFFEN- A897激光請(qǐng)求
Schlüsselschalter鑰匙開(kāi)關(guān):
鑰匙開(kāi)關(guān)在檔位"0?
鑰匙開(kāi)關(guān)在檔位“1”
或 "2“
安全回路:
? 安全門(mén)及外部急停通過(guò)X3A進(jìn)入到激光器,當(dāng)外部安全回路斷開(kāi)或急停故障時(shí)激光器立即停止工作。
? 通過(guò)X3A
進(jìn)入到激光器后通過(guò)主板網(wǎng)絡(luò)連接到快門(mén)模塊上,出現(xiàn)故障時(shí)快門(mén)關(guān)閉。
機(jī)器人控制部分:
1.IO域
E897-902 激光焊
E1297-E1360 送絲機(jī)
E473-476/E1409-1416 K1 電箱
E2145-2148 切絲閥
E516 7軸壓力檢測(cè)
E1009-1024 3軸閥的控制
E641-E699 ALO3焊頭的范圍
ANA6 機(jī)器人的移動(dòng)速度
ANA10 送絲速度
ANA12激光焊功率
ANA13 焊頭的上下方向位置
-
二極管
+關(guān)注
關(guān)注
149文章
10412瀏覽量
178501 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
31086瀏覽量
222324 -
激光器
+關(guān)注
關(guān)注
18文章
2960瀏覽量
64615
原文標(biāo)題:Laserline二極管激光器應(yīng)用之KUKA機(jī)器人程序分析
文章出處:【微信號(hào):gh_a8b121171b08,微信公眾號(hào):機(jī)器人及PLC自動(dòng)化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄

探索RISC-V在機(jī)器人領(lǐng)域的潛力
高精度機(jī)器人控制的核心——基于 MYD-LT536 開(kāi)發(fā)板的精密運(yùn)動(dòng)控制方案
RK3576機(jī)器人核心:三屏異顯+八路攝像頭,重塑機(jī)器人交互與感知
小蘿卜機(jī)器人的故事
工業(yè)機(jī)器人的特點(diǎn)
華工科技智能激光除草機(jī)器人項(xiàng)目落戶(hù)哈爾濱新區(qū)
輪式移動(dòng)機(jī)器人電機(jī)驅(qū)動(dòng)系統(tǒng)的研究與開(kāi)發(fā)
盤(pán)點(diǎn)#機(jī)器人開(kāi)發(fā)平臺(tái)
詳細(xì)介紹機(jī)場(chǎng)智能指路機(jī)器人的工作原理
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】視覺(jué)實(shí)現(xiàn)的基礎(chǔ)算法的應(yīng)用
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】機(jī)器人入門(mén)的引路書(shū)
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】+內(nèi)容初識(shí)
EtherCAT科普系列(7): EtherCAT技術(shù)在工業(yè)機(jī)器人控制系統(tǒng)領(lǐng)域的應(yīng)用




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論