 由C2機器人風扇故障聯想到C2機器人的內部結構
由C2機器人風扇故障聯想到C2機器人的內部結構

由C2機器人風扇故障聯想到C2機器人的內部結構:
電路分配圖:
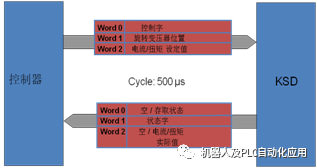
KRC2主要控制部分-信號傳輸
KRC2主要控制部分-安全回路
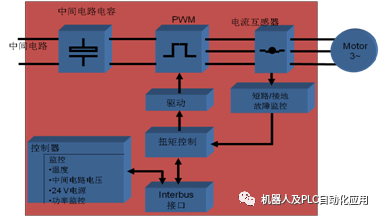
KUKA Power SupplyKPS 600電源供給模塊:
TheKPS 600 的作用:
?主要的電源供應
?開始回路的電源供應
?剎車控制(主要6個軸的以及額外2個軸的)
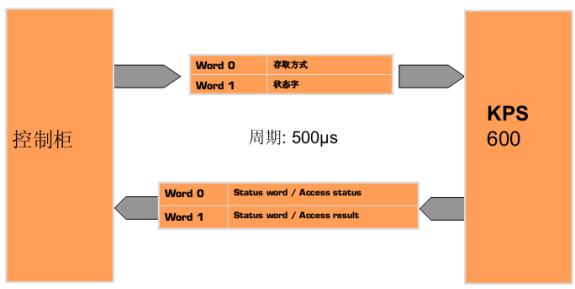
?通過Interbus來控制DSE-IBS的界面
?24 V 電壓分配
?電池電路
并且已經獲得下面的信號 : 熱槽溫度,控制柜內部溫度,控制柜風扇溫度,IC 電壓.
通過Interbus在KPS和控制柜之間傳遞的信號:
KPS-27提供27V電壓給
·剎車
?外圍電路(max. 10 A)
?機器人控制器
?伺服控制器
? 電池
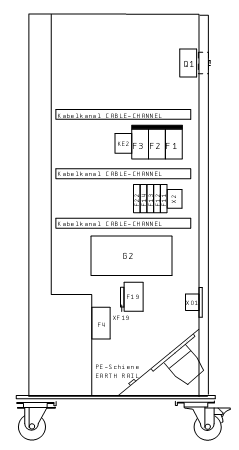
主要元器件的位置:
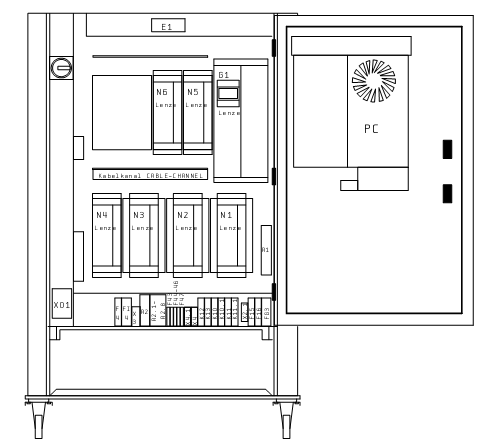
保險,空開的位置:
電機保護F1: KPS600/20
電機保護F2: KPS27
電機保護F3: Fan
保險絲 F4: 服務插座/ 控制柜照明240 V (可選)
電機保護F5: 外加的冷卻系統(可選)
F11: 24 V 供應KPS600 有電池備份(X7)
F12: 24 V 供應KPS600 無電池備份(X6)
F13: 控制柜照明24 V
F14: ESC 無電池備份的電源供應
F15: PC 有電池備份的電源
F16: RDC 有電池備份的電源
F17: ESC-CI 有電池備份的電路板, KCP 供應
F18: KSD 有電池備份的電源
F19: 剎車供應KPS600 (X12)
FG3: 電池保險絲
KSD KUKA ServoDrive KUKA伺服驅動器
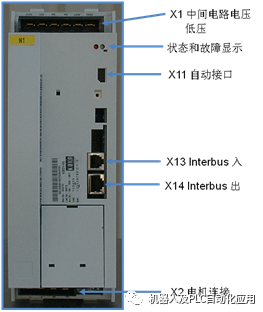
伺服驅動器功能描述
?掃描導向電流或者邏輯控制
?所有驅動器的功能和硬件檢測
電子安全回路(ESC)
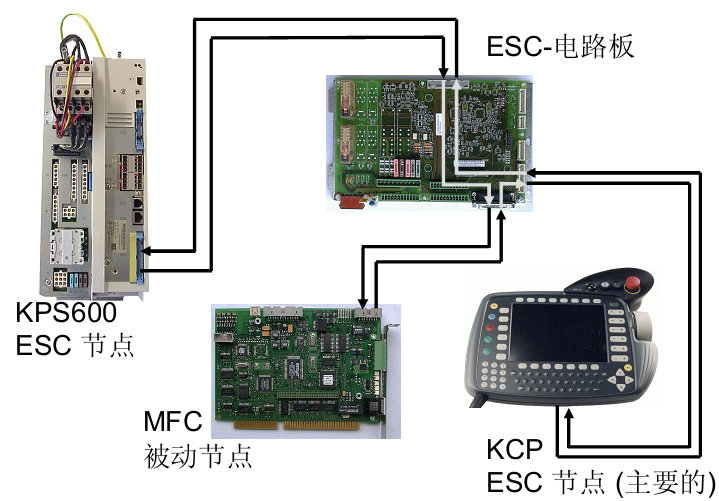
ESC(Electronic Safety Circuit,電子安全回路)是一個數字電路, 用以控制一個安全的系統。這個系統一直監視著所有相關的部分。ESC上的模塊上連接的所有節點都通過電源或者信號電纜相連接。
ESC可以偵測到的信號:
1.兩個頻道傳過來的交叉信號
2.由一個供應電壓和一個頻道傳輸過來的交叉信號
3.通信錯誤(例如電纜中斷)
4.硬件錯誤(不安全的輸出導致繼電器錯誤動作)
5.ESC監測到的有缺陷的信號
雙重回路上緊急開關量的比較:
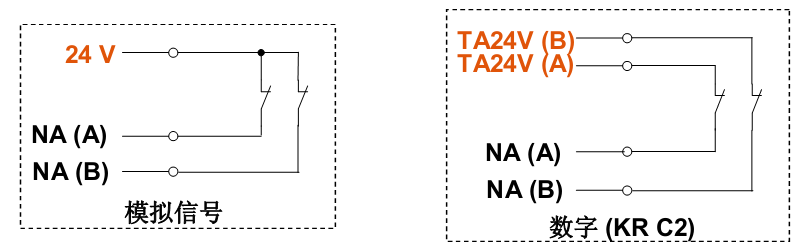
ESC –監測到不安全的輸出:
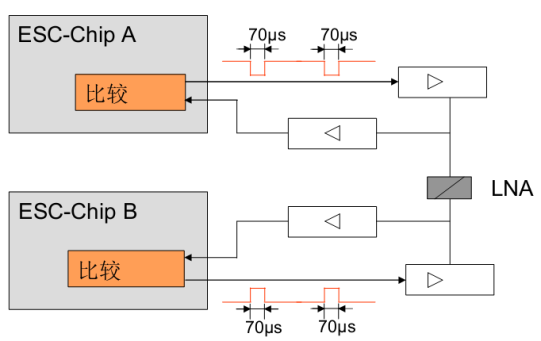
每個ESC都會發出一個信號,并且會將反饋的信號進行比較.
ESC 主板功能介紹:
跳線/ 其他安全系統的跳線 ---X13
用戶界面X11, 輸出:驅動開啟, 24V 直流電源供應 ---X12
用戶界面X11,輸出:操作模式, 內部緊急開關 ---X11
用戶界面X11, 伺服未連接 ---X8
用戶界面X11,測試輸出,外部緊急開關 ---X9
用戶界面X11,輸入:驅動開啟, 允許開關,操作者安全 ---X10
連接到KCP(CAN-Bus) ---X21
用戶設置I/O到X11;16輸入/20O輸出via CAN bus(可選) ---X7
用戶界面X11, 內部/外部電源供應--- X6
連接到KCP (ESC-Bus)--- X5
固定操作模式開關/ E7 特別的開關(可選) ---X4
連接到MFC ---X3
連接到KPS600 ---X2
電源供應(有或無電池備份)--- X1
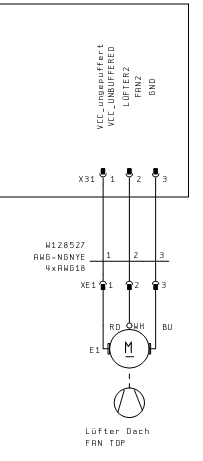
風扇電機轉向
頂部風扇: 風扇報警或者沒有反饋,機器人會沒有使能,頂部風扇E1接在A1板上X31端口
-
電源
+關注
關注
185文章
18842瀏覽量
263593 -
機器人
+關注
關注
213文章
31087瀏覽量
222324 -
控制柜
+關注
關注
4文章
188瀏覽量
22268
原文標題:KUKA-C2機器人電器結構
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄



 工商網監
工商網監
評論