") 圖像二值化操作
圖像二值化操作

圖像二值化操作
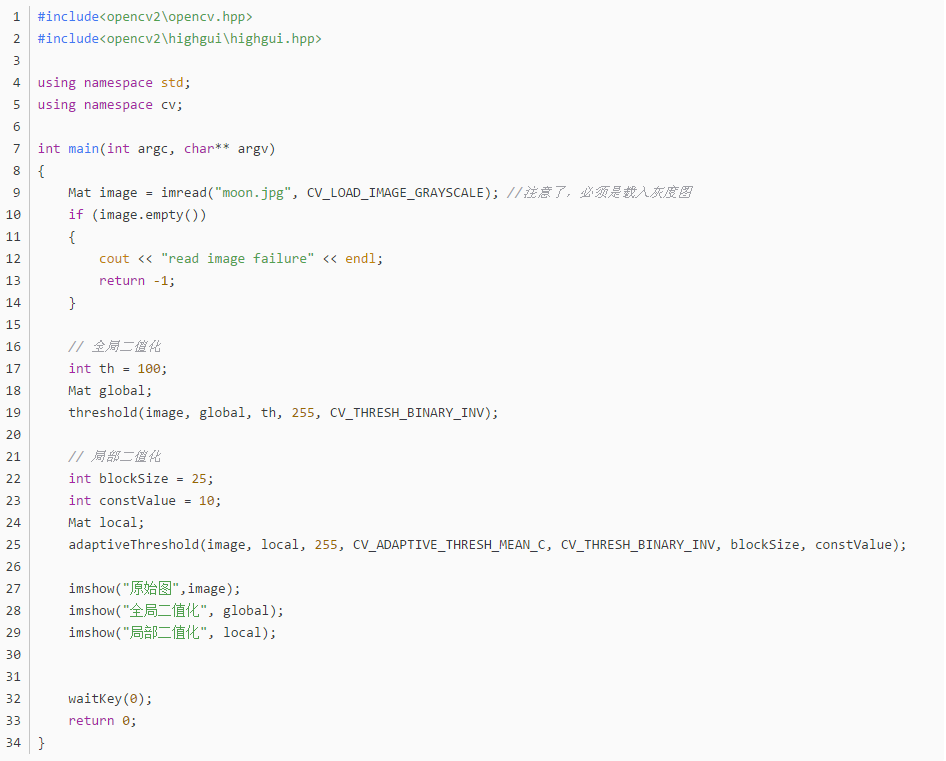
兩種方法,全局固定閾值二值化和局部自適應(yīng)閾值二值化
全局固定閾值很容易理解,就是對整幅圖像都是用一個(gè)統(tǒng)一的閾值來進(jìn)行二值化;
局部自適應(yīng)閾值則是根據(jù)像素的鄰域塊的像素值分布來確定該像素位置上的二值化閾值。
效果:
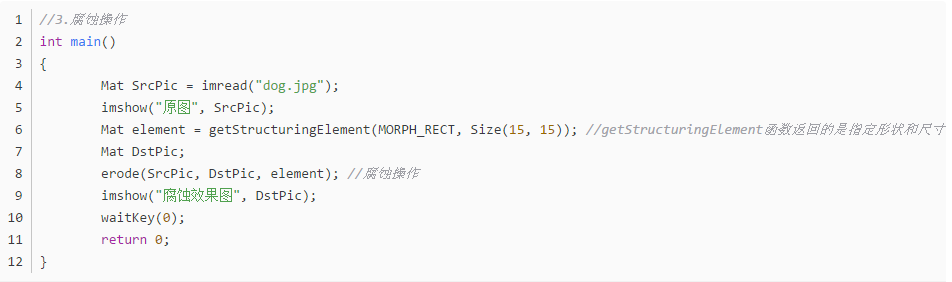
腐蝕操作
濾波操作,模糊處理
模糊處理在邊沿檢測和去噪聲方面有較為廣泛的應(yīng)用。OpenCV中提供了4種模糊算法,列舉如下:
average
median
gaussian
bilateral
這里我們只列舉使用 均值濾波實(shí)現(xiàn)圖像模糊:

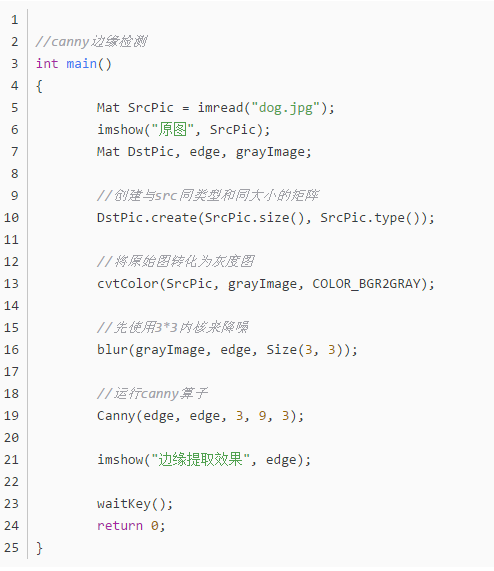
canny邊緣檢測
將原始圖像轉(zhuǎn)化為灰度圖,用blur函數(shù)進(jìn)行圖像模糊以降噪,然后用canny函數(shù)進(jìn)行邊緣檢測。
直方圖均衡化
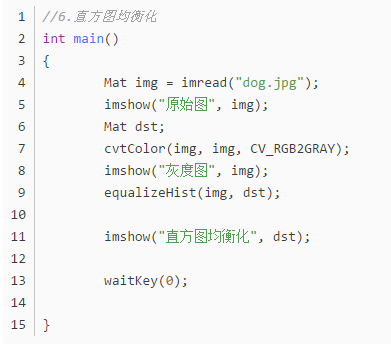
顯然均衡化后的圖片對比度變高了,變得更加明亮!
最后簡單總結(jié)一下圖像處理中概念
離散傅里葉變換
圖像高頻部分代表了圖像的細(xì)節(jié)、紋理信息;低頻代表了圖像的輪廓信息。
低通-》模糊
高通-》銳化
腐蝕和膨脹是針對白色部分(高亮部分)而言的。膨脹就是對圖像高亮部分進(jìn)行“領(lǐng)域擴(kuò)張”,效果圖擁有比原圖更大的高亮區(qū)域;腐蝕是原圖中的高亮區(qū)域被蠶食,效果圖擁有比原圖更小的高亮區(qū)域。
開運(yùn)算:先腐蝕再膨脹,用來消除小物體
閉運(yùn)算:先膨脹再腐蝕,用于排除小型黑洞
形態(tài)學(xué)梯度:就是膨脹圖與腐蝕圖之差,用于保留物體的邊緣輪廓。
頂帽:原圖像與開運(yùn)算圖之差,用于分離比鄰近點(diǎn)亮一些的斑塊。
黑帽:閉運(yùn)算與原圖像之差,用于分離比鄰近點(diǎn)暗一些的斑塊。
-
圖像
+關(guān)注
關(guān)注
2文章
1096瀏覽量
42329 -
模糊算法
+關(guān)注
關(guān)注
0文章
16瀏覽量
8920 -
OpenCV
+關(guān)注
關(guān)注
33文章
652瀏覽量
44799
原文標(biāo)題:OpenCV圖像處理常用手段
文章出處:【微信號:vision263com,微信公眾號:新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
IO序列化操作:提升系統(tǒng)互操作性的關(guān)鍵技術(shù)

車載圖像采集卡推薦:模塊化智駕圖像采集注入方案首選proFRAME
EspeedGrab圖像采集軟件介紹(Cameralink轉(zhuǎn)USB采集)
modbus消息幀的模塊化架構(gòu)介紹
FPGA的圖像采集過程
基于FPGA的膚色檢測方案簡介
使用Otsu閾值算法將灰度圖像二值化
基于LockAI視覺識別模塊:C++使用圖像的統(tǒng)計(jì)信息
基于LockAI視覺識別模塊:C++使用圖像的統(tǒng)計(jì)信息

基于LockAI視覺識別模塊:C++圖像的基本運(yùn)算
基于LockAI視覺識別模塊:C++圖像的基本運(yùn)算
基于LockAI視覺識別模塊:C++圖像采集例程
K230 yolo識別例程中,怎么修改攝像頭參數(shù)及AI推理輸入圖片參數(shù),使其采集二值化的圖像并將二值化圖像推給AI進(jìn)行推理呢
第二期“讀碼專家”圖像采集熱門問答,你關(guān)心的這里都有!



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論