 基于PON突發模式的高效低成本解決方案
基于PON突發模式的高效低成本解決方案

無源光網絡(PON)是光纖接入網中一個高效低成本的解決方案,具備數據傳輸速率快、效率高和成本低等優點。其核心是激光器,但特性極易受溫度和老化的影響。為解決此問題,所以自動平均功率控制電路要設計高性能并帶有環路調節,以補償因溫度和老化對電路造成的不足,并能使激光器的光功率穩定輸出。
突發模式下,在分配時隙到來時迅速向激光器供應穩定的偏置電流,來確保激光器的狀態正常偏置和自動消光比。因此,設計的PON自動功率控制電路要解決下列問題在突發模式,數據傳輸速率2.5Gbit/s在APC閉環電路調節時,有效地解決了過度補償迅速初始化設定,穩定輸出光功率。
1 功率控制系統設計
對于PON突發模式應用,必須使用硬件APC,因為激光器并非一直處于開啟狀態,功率調整必須在最初的突發時間很短的時間內進行微調完成,以避免傳輸期間的功率調整,使激光器DCB偏置的調整必須在突發開啟期間完成。
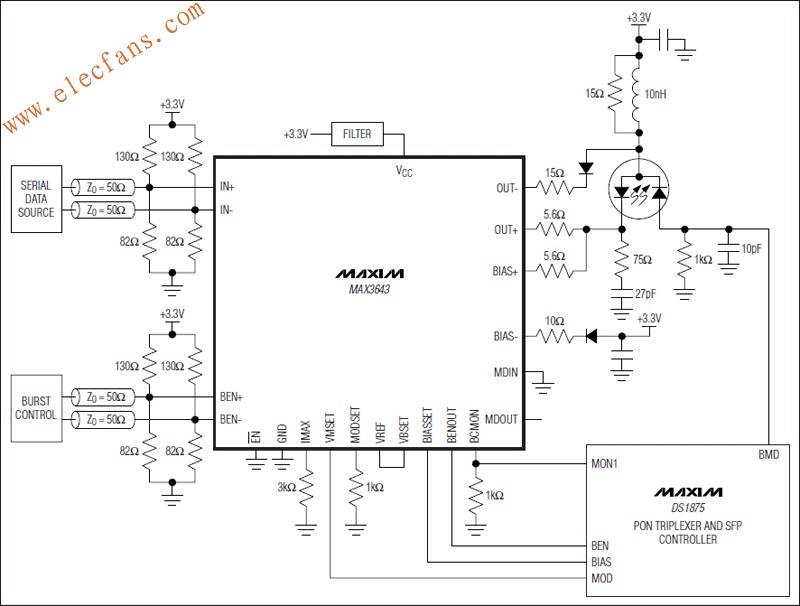
本文提出的Mean-APC電路框圖如圖1所示。APC主要由激光驅動器、數模調制電路和APC硬件邏輯控制電路三部分構成,其中APC硬件邏輯控制電路包括粗調、二進制調節和精調部分。
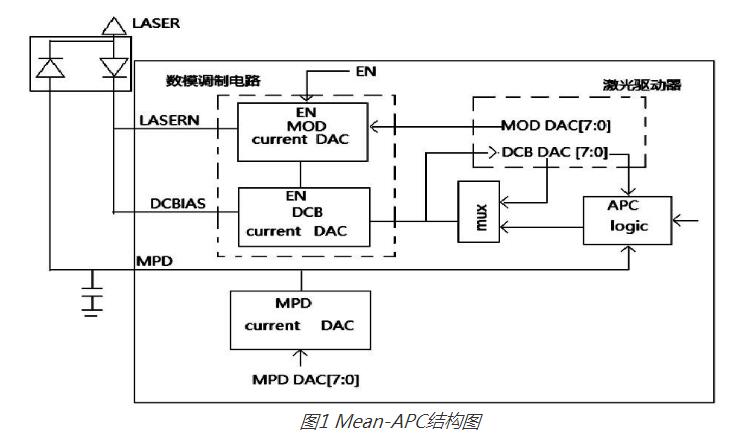
圖1 Mean-APC結構圖
激光驅動器分別由8位偏置電流數模轉換器(BIAS_DAC)和8位調制電流數模轉換器(MOD_DAC)控制。
監控光電二極管的輸出電流IMPD作為目標監控電流,由數模轉換器生成8位的MON_DAC,作為激光器平均輸出功率的參考值,監控光電二極管輸入以實現自動功率控制。
APC有兩種工作模式:快速啟動模式和慢速調整模式。快速啟動模式初始化功率設置功率模式的調節設置。在快速啟動算法的過程中,激光器上沒有進行數據傳輸,APC采用快速啟動算法調節偏置電流,啟動之后,APC工作在慢速調整模式,同時激光器進行數據傳輸,最后使調節后激光器的輸出平均光功率達到目標值。由于溫度和器件老化的影響,使得APC硬件邏輯電路在調節時,需考慮APC怎樣解決出現過度補償的問題。針對需要解決的問題,本文設計了APC硬件邏輯電路下慢速調整模式。快速啟動和慢速調整的目的都是確保實際監控電流Impd值等于定義的目標值。Impd由MON_DAC設置,可依據實際通信電路的要求合理取值MON_DAC。激光器的平均輸出光功率由MON_DAC來決定的,所以使其與目標監控電流Impd保持一定的關系。
1.1快速啟動模式
在電路上電復位或功率電平調整時,Mean-APC啟動快速算法,進入快速啟動模式。這時無數據傳輸,把激光驅動器的輸入電流設置為為Imod/2。在快速啟動時,定義的BIAS_DAC當前值成比例地增加或減少BIAS_DAC來增加或減少偏置電流。在快速啟動階段,APC硬件邏輯電路啟用快速啟動算法,調節偏置電流Ibias,偏置級具有數字自動平均功率控制回路,可設置平均輸出功率,并在溫度和電源電壓變化時保持此功率。直至監控電流Imod等于預設的Iapcset_bias,指數函數的相近表式:目標監視器光電二極管電流(A)=7.185A*2(APC-SET/32),保證輸出光功率穩定在傳輸數據時的平均光功率。
設計的關鍵依據初始值求目標值,實際值是逼近目標值的一個區間;依據實際值求精確值。快速啟動算法執行時,輸出光功率時序圖如圖2所示,采用四級快速啟動算法。其過程被分為四個階段將偏置電流BIAS_DAC設定為初始值,該初始值由BIAS_DAC寄存器提供。在快速啟動算法過程中,調制電流的初始值設為Imod/2;對BIAS_DAC逐步掃描,通過按每個時鐘周期的COUNT_INC中定義的BIAS_DAC的當前值成比例地增加或減少BIAS_DAC來增加或減少偏置電流一旦斜坡階段增加或減少偏置電流,使實際監視器電流超過由APCSET_DAC設定的目標監視器電流,就會啟動二進制搜索階段最后階段是APC回路集成模式。APC環路以由APC_CLOCK_SET定義的環路時鐘速率對監控器電流進行采樣,并對采樣的監控器電流做出決定,以增加或減少一位BIAS_DAC的值,以便將監控器電流保持在APCSET_DAC寄存器中定義的目標值。
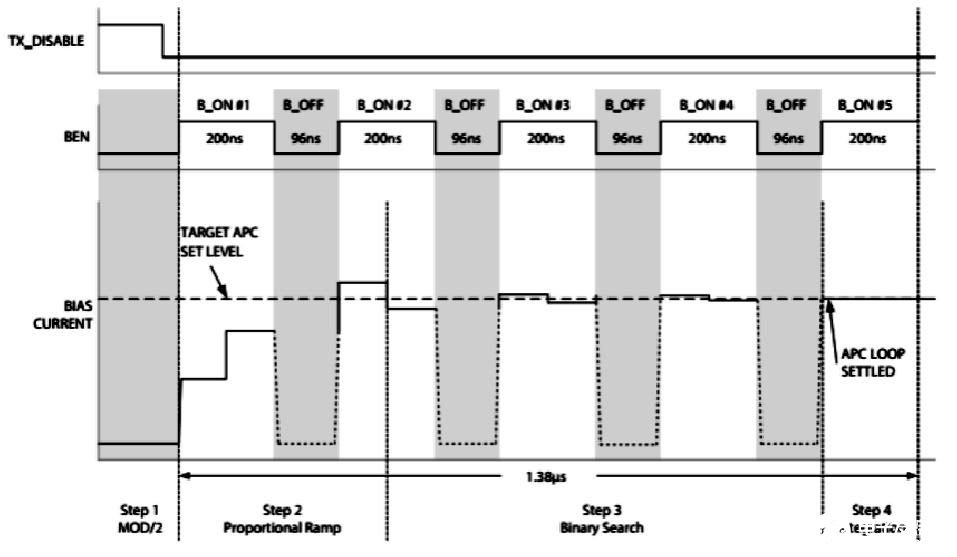
圖2 快速啟動時序圖
1.2慢速調整模式
快速啟動后,APC進入慢速調整模式,硬件控制邏輯的設置步驟:設置相關的APC控制參數,包括LTIME[4:0],DFHYS[1:0],CTIME[3:0]和FTIME[3:0];然后打開發送路徑(TXPD=0)并設置APCEN=1設置DCB電流比例因子DCBS,并通過將最大值寫入DCBDAC來設置最大DCB電流通過寫入MPDDAC和MPD比較器滯后控制MPDHYS[2:0]設置監控器反饋電流通過寫入MODDAC來設置調制電流APC硬件邏輯使用兩級功率控制。一種是首先執行的粗略控制,并使用二分搜索以6個步驟將功率設置逼近目標值(每個步驟由CTIME分隔)。粗調只會改變最重要的6位DCBDAC。粗調完成后,進入微調模式。細調由FTIME定期完成,或在每個突發結束時完成。當脈沖串打開時,APC邏輯加載先前存儲的DCBDAC值并將其用作輸出電流。然后等待CTIME并開始監測MPDCMPU和MPDCMPD。
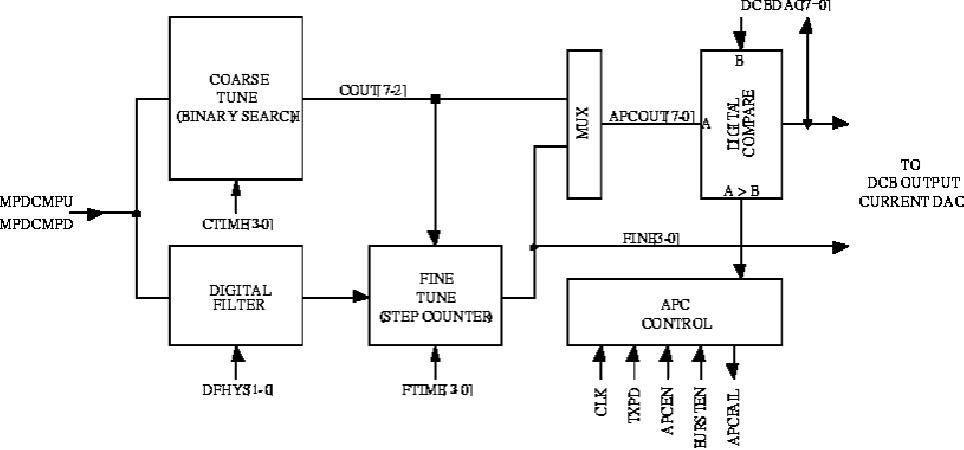
圖3 APC硬件邏輯電路
其被送入由SYSCLK提供時鐘的帶符號10位計數器,并由其信號變化決定計數器遞增1或遞減1。對于MPDHYS設置,在突發結束或FTIME到期之前檢查計數器值,以先發生者為準。如果計數值大于MPDHYS,則DCBDAC遞增1,或者如果計數值小于-MPDHYS,則DCBDAC遞減1,或者如果計數值在MPDHYS內,則DCBDAC保持不變。新的DCBDAC被更新并用于初始值的下一次突發。采用新調整的DCBDAC值,這避免了在實際傳輸過程中改變激光設置。使用APC硬件電路如圖3,激光功率可以在第一次爆發時間內接近最終目標(6CTIME)。粗調完成后,在突發結束時進行微調,每次調整為DCBDACLSB的1/16。如果FTIME設置的時間長于最大脈沖時間,則在激光開啟周期內,激光的功率設置不會發生。此法解決了因傳統調節造成調節后的輸出電流高于目標電流而引起得過度補償。
2 仿真與分析
本文依據PON要求采用SMIC0.18us工藝,設計了應用于PON激光驅動器中突發模式平均自動功率控制的APC電路,在debussy軟件上進行數字仿真和驗證,波形如圖4,在使能信號到來時,慢調部分進行調節,DCBOUT目標值為800,經過coarse time和fine time調節后,使得apc_fine_out保持DCBDAC值后,保證偏置電流穩定在設置值,使得平均光功率穩定輸出。
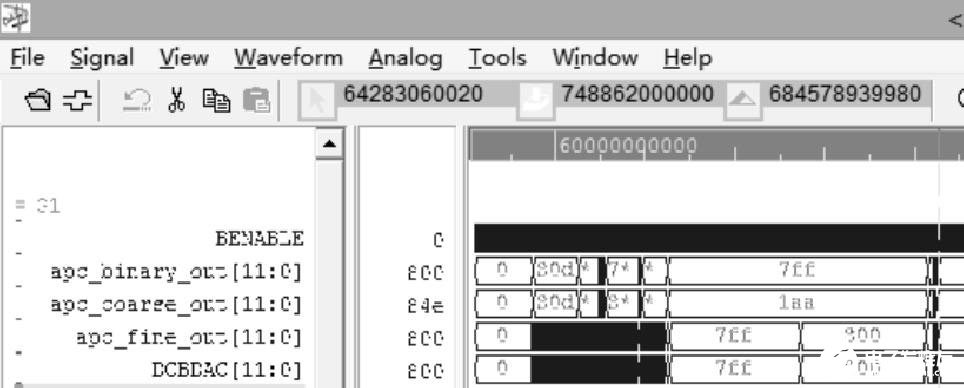
圖4 仿真波形
3 結語
本文設計的PON突發模式平均自動功率控制電路APC,通過慢速調節的coarse_time和fine_time設置,提高電路靈活性;通過對ctime和ftime的調節,可以快速響應實際監控電流和目標監控電流的比較,提高響應速率和精度。本文采用APC硬件邏輯電路,解決了功率控制環過度補償的問題,并保證偏置電流正常輸出,還提供穩定所需的激光器輸出平均光功率,其仿真結果符合GPON的ITU G984.4協議規定。
-
PON
+關注
關注
1文章
140瀏覽量
45198 -
突發模式
+關注
關注
0文章
4瀏覽量
1615
發布評論請先 登錄



 工商網監
工商網監
評論