 KUKAC4機器人電機風扇故障,使得機器人沒有好使能.
KUKAC4機器人電機風扇故障,使得機器人沒有好使能.

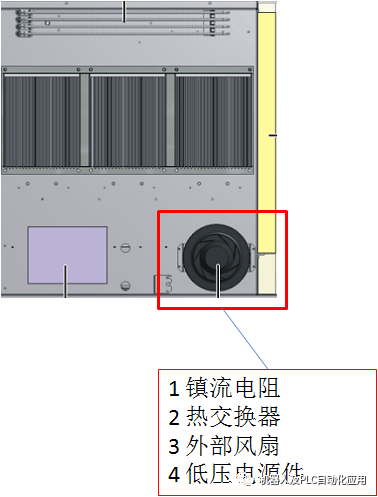
箱柜冷卻系統說明:
箱柜冷卻裝置包含兩條冷卻循環回路。裝有控制、功率電子元器件的箱內范圍通過一個換熱器進行散熱。在箱柜的外部區域,KPP 和 KPS 的低壓電源件、鎮流電阻和散熱體則直接通過外部空氣適當冷卻。
外部風扇更換步驟
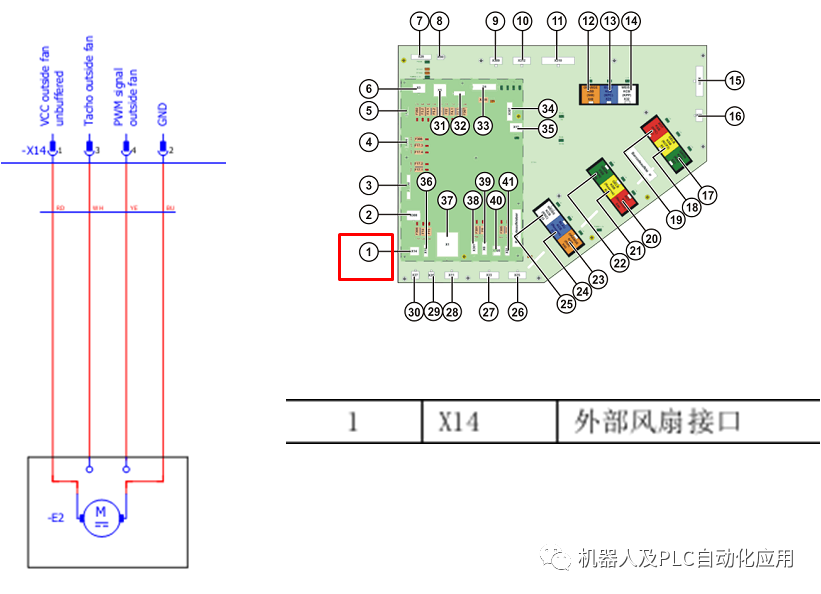
1. 從控制柜拔出風扇插頭(2) X14。
2. 擰松四條螺絲(1) 并將背板拆出。
3. 將進線套筒的固定螺絲(1)拆出。
4. 將進線套筒(2)折回,然后拉出連接線。
5. 將風扇支架(1) 連同風扇一起取下。
6. 將新風扇連同支架一起裝上并固定。
7. 將連接線引入箱柜內。
8. 裝上進線套筒。
9. 裝上背板,并將其固定
10. 將風扇插頭X14 插到控制柜上。

20.F14 外部風扇7.5 A

KUKA 機器人報:"外部風扇轉速低故障"
對電箱外部風扇進行清理,進行關機冷啟動.故障消除
-
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
31079瀏覽量
222291 -
電機
+關注
關注
143文章
9592瀏覽量
154121 -
KUKA
+關注
關注
3文章
218瀏覽量
17475
原文標題:KUKAC4機器人電機風扇故障,使得機器人沒有好使能.
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
再談低溫燒結銀的應用:從春晚四家機器人出鏡的幕后推手說起
半導體三重驅動,低溫燒結銀市場年增速超 40%,2025–2030 年進入規模化替代傳統焊料的關鍵期。
總結:春晚四家機器人的驚艷表現,是AS系列低溫燒結銀在電機、傳感器、芯片、功率模塊四大核心環節賦能
發表于 02-17 14:07
探索RISC-V在機器人領域的潛力
探索RISC-V在機器人領域的潛力
測評人:洄溯
測評時間: 2025年11月
測評對象: MUSE Pi Pro開發板(基于進迭時空K1系列高性能RISC-V CPU)
一、 開篇引言
發表于 12-03 14:40
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
瑞芯微RK3576 AIoT處理器處理器憑借其卓越的多屏異顯與8路攝像頭接入能力,為機器人領域帶來革新。米爾電子MYD-LR3576開發板實測數據顯示,在高負載下CPU占用僅34%,完美實現多路視覺
發表于 10-29 16:41
小蘿卜機器人的故事
經過我的申請,
馬老師發放了,
小蘿卜機器人的,
開發權限,
原來的小蘿卜公司,
因為經營不善倒閉,
作為科研產品,
幾個技術對此惋惜,
自掏腰包,
要讓小蘿卜機器人,
再生,
每次聽到小蘿卜說
發表于 10-23 05:24
自制巡線解迷宮機器人(上)
能提供較為穩定的扭矩和速度輸出,從而使得機器人的巡線過程變得更加高效。
電機驅動模塊我選用的是智能小車里面最常用的TB6612FNG,它相較于其他模塊的最大優點在于其在驅動兩路大電流
發表于 10-20 10:39
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
立體空間坐標系。相較于傳統陀螺儀易受振動干擾的問題,它在復雜環境下方向穩定性提升超 30%。比如 “障礙跑酷” 項目里,機器人 1 秒內需完成 7 次方向調整,該芯片提供的 0.1° 精度方位數據,能
發表于 08-26 10:02
藍思科技:今年承接智元機器人全系列多款人形機器人業務
電子發燒友網綜合報道 8月4日,藍思科技在接受調研時披露公司在人形機器人領域的最新進展。藍思科技表示,2024年起已為合作伙伴交付數百臺整機,今年則承接了智元機器人全系列多款人形機器人
工業機器人的特點
的基礎,也是三者的實現終端,智能制造裝備產業包括高檔數控機床、工業機器人、自動化成套生產線、精密儀器儀表、智能傳感器、汽車自動化焊接線、柔性自動化生產線、智能農機、3D 打印機等領域。而智能制造裝備中工業
發表于 07-26 11:22
輪式移動機器人電機驅動系統的研究與開發
【摘 要】以嵌入式運動控制體系為基礎,以移動機器人為研究對象,結合三輪結構輪式移動機器人,對二輪差速驅動轉向自主移動機器人運動學和動力學空間模型進行了分析和計算,研究和設計了自主移動機器人
發表于 06-11 14:30
工業機器人與協作機器人概念不同
在自動化生產的浪潮中,工業機器人與協作機器人逐漸成為企業提升效率、優化產能的得力助手。但它們并非同一概念,在功能、設計與應用場景上有著顯著差異。北京沃華慧通測控有限公司憑借深厚的技術沉淀,為不同需求的企業提供適配的機器人解決方案

盤點#機器人開發平臺
地瓜機器人RDK X5開發套件地瓜機器人RDK X5開發套件產品介紹 旭日5芯片10TOPs算力-電子發燒友網機器人開發套件 Kria KR260機器人開發套件 Kria KR260-
發表于 05-13 15:02
詳細介紹機場智能指路機器人的工作原理
,配備高性能的電機和傳動裝置,為機器人提供穩定的動力輸出。通過精確的電機控制算法,機器人可以實現前進、后退、轉彎等各種動作,并且能夠根據不同的地面狀況和行走需求,靈活調整行走速度和姿態
發表于 05-10 18:26
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
ROS的全稱:Robot Operating System 機器人操作系統
ROS的 目的 :ROS支持通用庫,是通信總線,協調多個傳感器
為了解決機器人里各廠商模塊不通用的問題,讓機器人快速開發
發表于 04-30 01:05
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
講解了如何在 ROS 2 中實現機器人的運動控制,包括速度控制、位置控制等。通過編寫運動控制節點,可以接收來自上層的控制指令,如速度指令或目標位置指令,然后通過底層的驅動程序控制機器人的電機,實現
發表于 04-27 11:24
庫卡KUKA機器人常見故障維修
; ⑤盤管灌溉不足; 2.維修期間KUKA機器人伺服電機過熱故障排除 ①降低電源電壓(例如,調整電源變壓器的抽頭); ②增加電源電壓或更換電源; ①修理鐵芯并排除故障; ①減載;按照規



 工商網監
工商網監
評論