 分析服務器程序和機器人控制系統之間的數據交換
分析服務器程序和機器人控制系統之間的數據交換

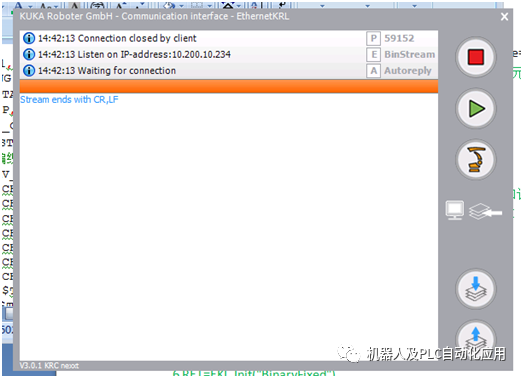
ETHERNETKRL用于視覺抓取和PC通訊的大數據量數據快速交換!采用報文形式連接,機器人使用XML文件進行連接。
1.信息提示窗口
2.顯示所設置的通訊伙伴
P:端口編號
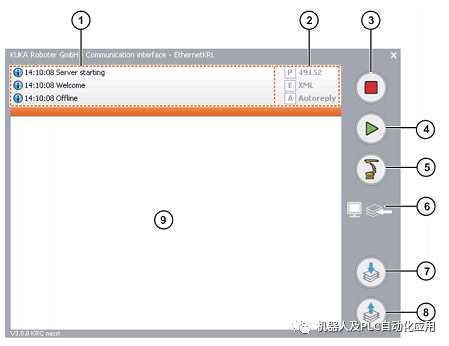
E: 示例數據
Xml :XML 數據
BinaryFixed :有固定長度的二進制數據
BinaryStream:帶末尾字符串的可變二進制數據流
A:通訊模式
Autoreply :服務器自動回答每個接收的數據包。
Manual:僅手動接收數據或發送數據
3.停止按鈕
結束與機器人控制系統的通訊并且重置服務器。
4. 開始按鈕
分析服務器程序和機器人控制系統之間的數據交換。連接第一個到
達的連接請求并用作通訊適配器。
5. 用于設置通訊參數的菜單按鈕
6. 顯示選項
7. 手動接收數據的按鈕
8. 手動發送數據的按鈕
9. 顯示窗口
根據所設置顯示選項的不同,顯示發送或接收的數據。
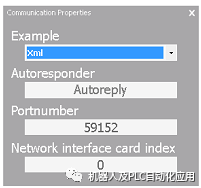
Example 選擇示例數據。
Xml:XML 數據
BinaryFixed :有固定長度的二進制數據
BinaryStream:帶末尾字符串的可變二進制數據流
默認值:xml
Autoresponder 選擇通訊模式。
Autoreply :服務器自動回答每個已接收的數據包。
Manual:僅手動接收數據或發送數據
默認值:Autoreply
端口編號 輸入插座連接的端口編號。
外部系統在該端口上等待機器人控制系統的連接請求。
必須選擇一個沒有作為標準服務占用的空號。
默認值:59152
提示:選擇端口時,須注意不能有其他服務 (如操作系統)使用該端口。否則無法通過該端口建立連接。
Network interface card index 輸入網絡適配器編號。
只有當外部系統使用多個網卡 (如 WLAN 和 LAN)時才相關。
默認值:0 我的電腦用了1
實踐測試C4 8.2系統連接服務器成功但是不能執行BinaryFixed( )程序,連接C4 8.3系統連接服務器成功,執行BinaryFixed( )程序成功。
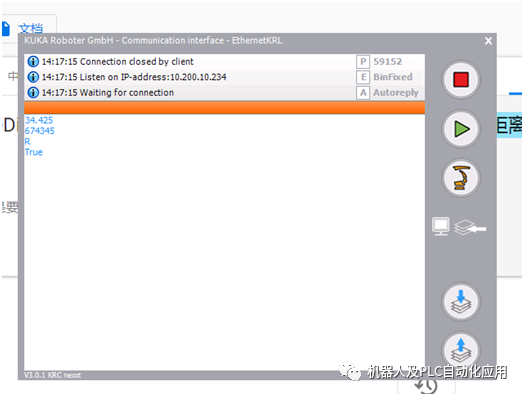
程序更改測試成功!
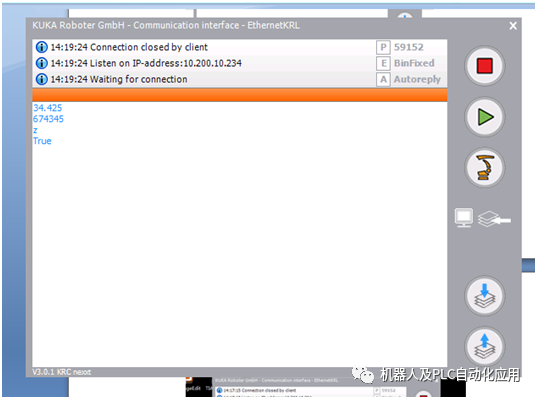
執行“BinaryStream”程序成功!
今天是技術突破的一天!哈哈有理論到實際,還是需要過程的。今后還會繼續把學習ETHERNETKRL編程心得與大家進行分享.
責任編輯:pj
-
機器人
+關注
關注
213文章
31087瀏覽量
222324 -
服務器
+關注
關注
14文章
10255瀏覽量
91516 -
程序
+關注
關注
117文章
3846瀏覽量
85256
發布評論請先 登錄
高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
兩臺變頻器之間如何直接實現數據交換?

機器人競技幕后:磁傳感器芯片激活 “精準感知力”
ADI安全產品如何簡化不同機器人控制系統中安全機制的實現

ADI解讀機器人控制系統中的安全風險和有效安全措施 為機器人技術的未來發展筑牢安全防線




 工商網監
工商網監
評論